 合肥工业大学自动控制理论综合实验球杆实验报告.docx
合肥工业大学自动控制理论综合实验球杆实验报告.docx
- 文档编号:9909900
- 上传时间:2023-02-07
- 格式:DOCX
- 页数:21
- 大小:296.30KB
合肥工业大学自动控制理论综合实验球杆实验报告.docx
《合肥工业大学自动控制理论综合实验球杆实验报告.docx》由会员分享,可在线阅读,更多相关《合肥工业大学自动控制理论综合实验球杆实验报告.docx(21页珍藏版)》请在冰豆网上搜索。
合肥工业大学自动控制理论综合实验球杆实验报告
合肥工业大学自动控制理论综合实验球杆实验报告
合肥工业大学电气与自动化工程学院专业中心实验室李扬20092178
实验一球杆系统的数学模型
实验目的
l掌握对实际物理模型的建模方法
l掌握在Matlab中利用Simulink等工具对系统进行模型分析的方法。
实验内容:
1)分析并推导系统的数学模型;
2)求解系统的状态空间方程和传递函数方程;
自动控制理论实验1
合肥工业大学电气与自动化工程学院专业中心实验室李扬20092178在matlab中建立一下m文件并运行,
m=0.028;R=0.0145;g=-9.8;J=0.4*m*R^2;a=-m*g/(J/R^2+m);A=[0100;00a0;0001;0000]B=[0;0;0;1]
C=[1000]
D=0
[n,d]=ss2tf(A,B,C,D);G=tf(n,d);
返回,
A=01.000000
007.00000
0001.0000
0000
B=0
0
0
1
C=1000
D=0
Transferfunction:
-4.441e-016s^3+1.998e-015s^2+3.997e-015s+7
---------------------------------------------------
s^4
上式即为传递函数方程。
3)在Matlab下建立系统的模型并进行阶跃响应仿真。
为得到阶跃响应,输入命令,step(G)得到阶跃响应曲线如下,
StepResponse0.35
0.3
0.25
0.2实验内容:
StepResponse0.51.在matlab下仿真比例控制时系统的响应情况。
Amplitude0.150.45在matlab中建立m文件并运行,0.40.1m=0.028;0.35
R=0.0145;0.30.05g=-9.8;0.25
L=0.40;00.2Amplitude00.10.20.30.40.50.60.70.80.910.15d=0.045;Time(sec)0.1J=0.4*m*R^2;0.05K=(m*g*d)/(L*(J/R^2+m));%simplifiesinput实验二球杆系统的数字P控制器设计0num=[-K];0510152025303540实验目的Time(sec)den=[100];了解P控制器原理及其对球杆系统的控制作用
ball=tf(num,den)实验原理:
kp=1;
sys_cl=feedback(kp*ball,1)%建立闭环系统
step(0.25*sys_cl)%阶跃响应
2.进入BallBeamControl应用控制程序进行实时控制;
实验步骤如下,
1)让小球稳定在一个位置,设为200,
2)设置Kp=const(常数),Kd=0,Ki=0,拖动相应滑块到最低位置即为0,,
3)拖动小球目标位置滑块往右移动到需要位置,设置此处为300,
4)松开鼠标即刷新参数,系统开始运动
5)改变Kp的值,观察响应变化
自动控制理论实验2
合肥工业大学电气与自动化工程学院专业中心实验室李扬20092178
实验内容:
1、在matlab中仿真PD控制器下球杆系统的响应情况。
思路是选取同一个Kp,这里取kp=1,,改变微分时间Td,以观察Td对系统的影响。
m=0.028;R=0.0145;g=-9.8;L=0.40;d=0.045;J=0.4*m*R^2;K=(m*g*d)/(L*(J/R^2+m));
num1=[-K];den1=[100];ball=tf(num1,den1)kp=1;
Td=10;
num2=[kp*Tdkp];den2=[1];PD=tf(num2,den2);sys_cl=feedback(PD*ball,1)%建立闭环系统
step(0.25*sys_cl)%阶跃响应
holdon
Td=20;num3=[kp*Tdkp];den3=[1];PD=tf(num3,den3);从结构可以看出,系统实际输出和matlab仿真结果很相似,但是由于参数不一样,系统忽略了很多次要因素,而
sys_cl=feedback(PD*ball,1)%建立闭环系统在实际系统中,这些因素又在起作用,所以有时候振幅会收敛(阻力),有时候发散9比例系数过大,并有迟延环节
step(0.25*sys_cl,':
')%阶跃响应作用)holdon(此处可能需要另外加图,以表示不同的kp对系统的影响)Td=30;num4=[kp*Tdkp];den4=[1];PD=tf(num4,den4);实验三球杆系统的数字PD控制器设计sys_cl=feedback(PD*ball,1)%建立闭环系统实验目的step(0.25*sys_cl,'-.')%阶跃响应掌握PD控制器的控制原理和对球杆系统的控制效果legend('Td=10','Td=20','Td=30')实验原理:
Transferfunction:
StepResponse0.78750.35Td=10------Td=200.3s^2Td=30Transferfunction:
0.257.875s+0.7875
----------------------0.2s^2+7.875s+0.7875
Transferfunction:
Amplitude0.15
15.75s+0.7875
----------------------0.1
s^2+15.75s+0.7875
0.05Transferfunction:
23.63s+0.78750----------------------00.10.20.30.40.50.60.70.8Time(sec)s^2+23.63s+0.7875
实验结果分析,
可以看出,系统在PD控制下是一个无振荡输出,也可能出现衰减振荡的情况,这种情况取决于kp,,系统可以稳定。
通过改变控制器的参数,可以调整系统的响应速度、稳定时间和超调等。
具体改变情况是,增加Td,即增加Kd,可以减少调节时间。
另外,由自控理论我们知道,增加Td可以减少调节时间,但也增大了超调量。
实际系统中,存在一些阻力和摩擦,但在建模过程中为简单起见,忽略了这些阻力的影响,但是在实际系统中,因为这些因素的存在,系统在达到平衡状态时会存在一定的稳态误差。
而且,对于控制问题通常有多个解决方案。
2、利用固高科技球杆系统进行实验:
步骤如下
1)让小球稳定在一个位置,此处选50,
2)设置Kp=const(常数),Kd=const,Ki=0,拖动相应滑块到最低位置即为0,
3)拖动小球目标位置滑块往右移动到需要位置,此处选300,4)松开鼠标即刷新参数,系统开始运动,
5)改变Kp、Kd的值,观察响应变化。
自动控制理论实验3
合肥工业大学电气与自动化工程学院专业中心实验室李扬20092178
K=(m*g*d)/(L*(J/R^2+m));%simplifiesinput
num=[-K];den=[100];ball=tf(num,den)
kp1=40;
Ti=4;
Td=0.74;
n=[kp1*Ti*Tdkp1*Tikp1];d=[Ti0];
PID=tf(n,d);
sys_c1=feedback(PID*ball,1)%建立闭环系统
step(sys_c1)%阶跃响应
axis([0301.2])
StepResponse
1
可以看出,在PD控制作用下,系统可以很快的稳定,但是明显的存在稳态误差,如上图,稳态误差为13.53mm,
0.8分析误差产生的原因,可以在平衡位置仔细观察小球位置改变和输入角的关系。
0.6实验四球杆系统的数字PID控制器设计Amplitude
实验目的0.4掌握PID控制算法的原理和实际应用
实验原理:
0.2
000.511.522.53Time(sec)
返回,Transferfunction:
0.7875
------
s^2此为球杆系统传递函数。
返回,Transferfunction:
93.24s^2+126s+31.5
--------------------------------
4s^3+93.24s^2+126s+31.5此为带有PID控制器的闭环系统传递函数。
2)利用仿真得到的PID参数在IPMMOTION软件中进行实时控制实验,并比较仿真结果与实际运行结果的差异,分
析原因。
取PID参数分别为,2,10,2运行IPMMOTION软件,得到以下结果,
实验内容
1)利用齐格勒-尼赫尔斯法则设计PID控制器,并在matlab下仿真系统性能。
分析,经过“实验二”的验证,此球杆系统无法在纯比例控制下达到临界稳定,也就无法用稳定边界法设计控制,
我这里面使用“凑试法”,
经过多次调试,发现当Kp=40,Ti=Kp/Ki=4,Td=Kd/Kp=0.74时,控制效果比较好。
Matlab程序如下,从实验结果可以看出来,系统的稳态误差为1.31mm.改变PID参数进行实验,比较理论和实际实验结果的区别,分析各m=0.028;R=0.0145;g=-9.8;L=0.40;d=0.045;J=0.4*m*R^2;参数和性能指标的关系。
自动控制理论实验4
合肥工业大学电气与自动化工程学院专业中心实验室李扬20092178
对于不同的球杆系统,由于摩擦阻力和别的不确定因素,在相同的参数控制下,系统的响应可能不一样。
4T,s,,n此处增加Kp,Ti,Td对系统性能影响的叙述。
注意,Ts被定义为,系统已经稳定下来,也就是响应余量在终值的2%以内时的时间。
从上式可以得出阻尼比和自然频率分别为0.7和1.9。
实验五根轨迹算法设计球杆系统控制器
实验目的sgrid(0.70,1.9)学习使用根轨迹法设计一个稳定的系统,进一步理解根轨迹的基本概念和根轨迹图所代表的含义,通过实验来验证axis([-55-22])增加零、极点以及开环增益对系统性能有何影响。
RootLocus实验原理:
2
1.50.7
1
0.5
1.90
-0.5ImaginaryAxis
-1
0.7-1.5
-2-505RealAxis在由点组成的两条斜线间的区域代表了超调量小于5%的范围。
曲线外的区域代表了稳定时间小于3秒的范围。
注意
到根轨迹没有落到由这些线所形成的设计目标范围内,为了系统稳定性,要将根轨迹落到左侧区域,需要加一个超
前补偿器。
实验内容超前补偿器根轨迹的设计思想是,利用开环根轨迹来评估闭环系统响应,也就是通过在原系统上增加零、极点,增加补偿器,,,,sz0来修正根轨迹以及闭环响应。
首先观察该系统的开环根轨迹。
在matlab中建立以下m文件以建立系统模型和根轨迹。
G(s),K超前补偿器有如下形式,。
其中z比p小。
ooc,,,sp0m=0.028;R=0.0145;g=-9.8;L=0.40;d=0.045;J=0.4*m*R^2;
K=(m*g*d)/(L*(J/R^2+m));观察加上补偿器后的根轨迹。
将零点定位在原点附近以抵消一个极点。
极点在原点左侧以便将根轨迹更远的拉到左num=[-K];den=[100];侧区域。
在m文件中继续输入以下代码并运行:
ball=tf(num,den)zo=0.01;po=5;contr=tf([1zo],[1po]);rlocus(ball)rlocus(contr*ball)运行m文件得到如下根轨迹:
sgrid(0.70,1.9)
现在,根轨迹的分支已经在设计目标范围内。
可以看到系统在原点有两个极点沿虚轴伸向无穷远处。
确定增益使用sgrid命令可以将设计目标也显示在根轨迹上。
该命令生成阻尼比与自然频率的栅格。
阻尼比和自然频率可以用使用rlocfind命令来确定系统的增益。
在m文件中加入以下几行以下方程求出,它们与超调量(PO)和稳定能时间(Ts)有关。
[k,poles]=rlocfind(contr*ball)21,,,,,到图形显示窗口选择用十字形光标一点。
P.O.,100e
自动控制理论实验5
合肥工业大学电气与自动化工程学院专业中心实验室李扬20092178
实验原理及内容
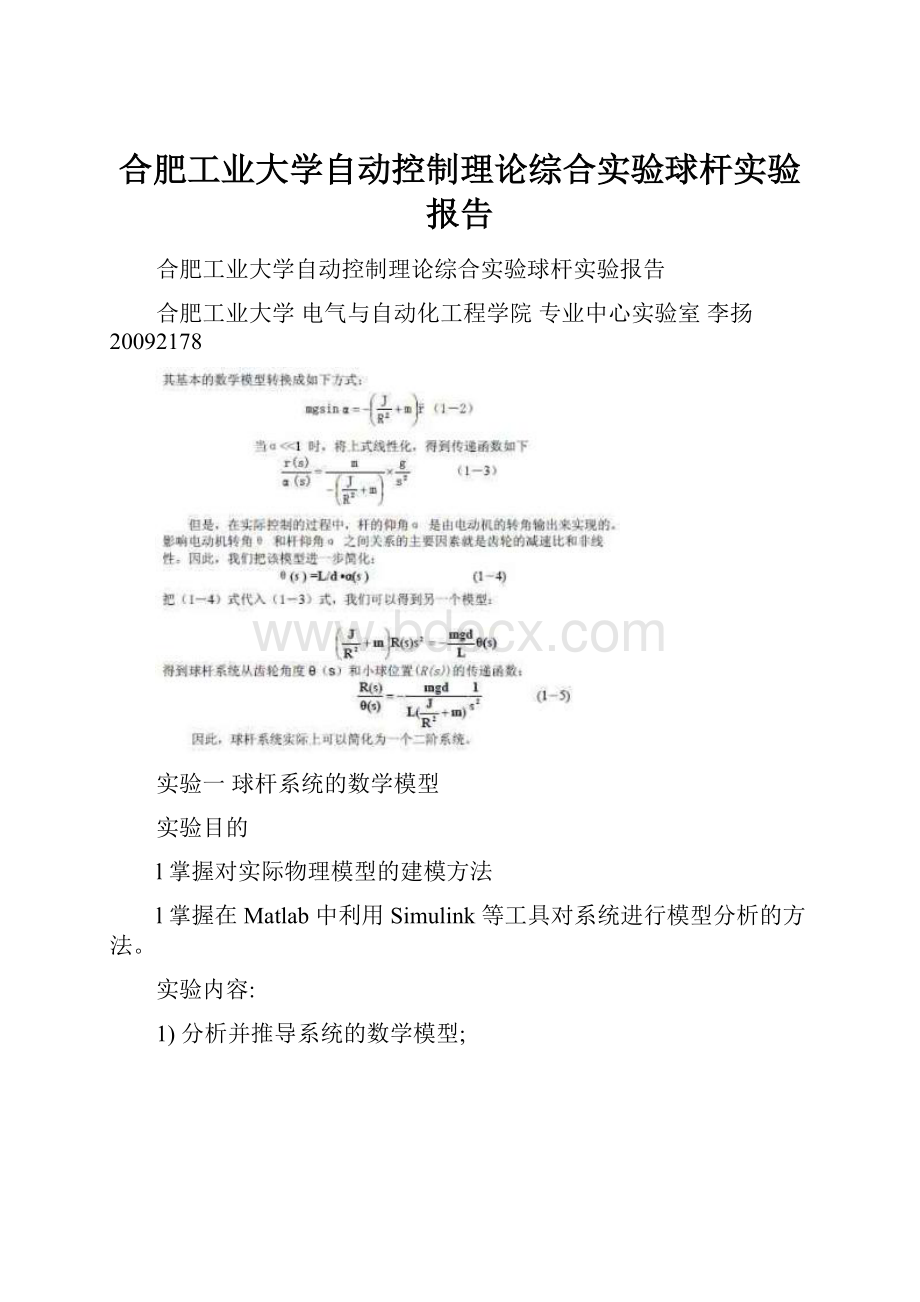
球杆系统的开环传递函数可以描述为:
R(s)mgd1,,2J,(s)sL(,m)2R
设计标准为:
稳定时间不超过3s
超调量小于5,
带有控制器的闭环系统如图所示:
x+edx,控制器球杆系统
-
设计过程;
开环波德图基于频率的设计思想,即使用开环传递函数的波德图得到闭环系统的响应。
对一个系统增加控制器可以改变开返回,selected_point=-2.4988+1.2493i
环波德图,也就可以改变闭环响应。
先绘制开环传递函数的波德图。
k=37.3131
建立以下m文件并在matlabcommand窗口运行,poles=
m=0.028;R=0.0145;g=-9.8;L=0.4;J=2/5*m*R^2;d=0.045;-2.4950+1.2493i
K=(m*g*d)/(L*(J/R^2+m));-2.4950-1.2493i
num=[-K];den=[100];-0.0101
ball=tf(num,den);现在,可以画出具有该增益的系统的响应。
bode(ball)画出闭环系统响应
然后看到以下波特图,在m文件中加入以下几行,
sys_cl=feedback(k*contr*ball,1);
t=0:
0.01:
5;
figure
step(sys_cl,t)
运行m文件,在根轨迹上选择如上所示一点,就可以看到系统的阶跃响应。
StepResponse1.4
1.2
1
0.8从图上可以看出相位裕度是0。
0相位裕度意味着系统是不稳定的。
要使用超前补偿控制器来增加相位裕度。
Amplitude0.6
相位超前控制器0.4相位超前补偿器具有如下形式,0.2,1Ts,G(s)K(),,1Ts000.511.522.533.544.55通过频率范围1/aT和1/T,被称为角频率,,相位超前补偿器将使系统增加正的相位。
超前补偿器最大可补偿Time(sec)的相位是90度。
在我们的控制器设计中,超调量要小于5%,即zeta为0.7,一般的,zeta*100就是对应于期望
超调量的最小的相位裕度。
所以希望大于70度的相位裕度。
可以看到超调量和稳定时间都符合要求。
使用以下步骤得到"T"和"a",
1.确定需要的正相位。
需要大于70度的正相位。
2.确定相位要增加处的频率,中心频率,
这一般很难确定,因为伯德图中的相频曲线是一条平坦的直线。
不过,由于知道带宽频率(ωBW)和稳定时实验六频率响应法设计球杆系统控制器间的关系,ωBW近似1.92rad/s,所以需要比他靠前的中心频率,取1。
实验目的
1,sin学习将系统的上升时间、超调量等性能指标与所要设计的目标参数联系起来,学习在频率域使用超前、滞后校正系,,3.从下式中确定常数a。
这将确定在0和极点之间所需要的最大的可增加的相位。
统的方法;进一步加深对系统性能指标、相角裕度等概念的理解。
1,sin,
自动控制理论实验6
合肥工业大学电气与自动化工程学院专业中心实验室李扬20092178
Φ表示需要的相位裕度,对于70度,a=0.0311。
m=0.028;R=0.0145;g=-9.8;L=0.40;d=0.045;J=0.4*m*R^2;
K=(m*g*d)/(L*(J/R^2+m));,1,T,T,4.从以下方程确定"T"和"aT"。
:
num=[-K];den=[100];ball=tf(num,den);,,,%askuserforcontrollerinformation对于70度和中心频率,w,=1,aT=0.176,T=5.67。
pm=input('PhaseMargin?
.......');可以把超前控制器加到我们的系统中。
在m文件中去掉bode命令,加入以下内容,w=input('CenterFrequency?
...');phi=70*pi/180;k=input('Gain?
...............');%viewcompensatedsystembodeplota=(1-sin(phi))/(1+sin(phi));pmr=pm*pi/180;w=1;a=(1-sin(pmr))/(1+sin(pmr));T=1/(w*sqrt(a));T=sqrt(a)/w;k=1;aT=1/(w*sqrt(a));numlead=k*[T1];denlead=[a*T1];numlead=k*[aT1];contr=tf(numlead,denlead);denlead=[T1];bode(contr*ball)contr=tf(numlead,denlead);得到,figure
bode(contr*ball)%viewstepresponse
sys_cl=feedback(contr*ball,1);
t=0:
0.01:
5;
figure
step(0.25*sys_cl,t)
使用该m文件,可以选择相位裕度,中心频率,增益。
PhaseMargin,…….,88
CenterFrequency?
...,1.5
Gain?
........................:
1
得到,
可以看到相位裕度70度左右。
为了检查闭环系统对0.25m阶跃的响应,在m文件中增加以下内容,
sys_cl=feedback(contr*ball,1);
t=0:
0.01:
5;
step(0.25*sys_cl,t)
得到,
实验七球杆系统在MatlabSimulink环境下的实时控制
实验目的
熟悉在MatlabSimulink环境下进行实时控制的原理和方法。
实验内容
1)利用GBB1004系列球杆系统进行MatlabSimulink环境下控制实验,在熟悉掌握系统各个模块后,进行控制实验,
点击“StartSimulation”开始运行程序,改变PID控制器的参数,观察实验效果;
由于电机转动和横杆转动之间通过一对齿轮减速,所以需要对电机位置取反,因此设置Gain模块为-1。
得到电机的目标位置后,通过S-Function把目标位置发送给电机驱动器,驱动电机达到目标位置。
双击
“SetMotorPos”模块打开如图7-14所示,
增加更多的相位
为了减小超调量,相位可以更超前。
为使前面的过程更简化,使用以下程序建立m文件。
function[]=phaseball()%defineTF
自动控制理论实验7
合肥工业大学电气与自动化工程学院专业中心实验室李扬20092178
2)将在matlab中仿真建立的P控制器、PD控制器、PID控制器、根轨迹法设计的补偿控制器、频率响应法设计的补偿
控制器分别在MatlabSimulink环境下运行,观察实际控制结果与仿真结果的异同,并分析原因。
剩下此部分
运行程序,可以通过示波器观察实验数据,
试验运行结果,小球位置曲线,
试验运行结果(电机位置曲线)
自动控制理论实验8


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 合肥 工业大学 自动控制 理论 综合 实验 球杆 报告
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《Java程序设计》考试大纲及样题试行.docx
《Java程序设计》考试大纲及样题试行.docx
-
《工业企业管理》自学任务书.docx
-
《短歌行》原文翻译及赏析.docx
-
《跳水》教案3.docx
-
《基于MATLAB的信号与系统实验指导》编程练习.docx
-
《你是最棒的》教学设计.docx
-
《选修4化学反应原理》知识点总结整理超全.docx
-
2环境应急监测试题资料.docx
-
《自动化仪表工程施工及验收规范》GB50093仪表安装检验批.docx
-
09年法律硕士民法预热辅导第2102讲完整篇doc.docx
-
6阅读能力阅读方法指什么.docx
-
《豆蔻镇的居民和强盗》读后感.docx
-
CMYK色值参考.docx
-
3121护理查对制度.docx
-
《草莓》课堂教学课件5篇.docx
-
CCNA完整知识点.docx
-
《合理安排时间》说课稿.docx
-
18我的伯父鲁迅先生.docx
-
3dmax授课计划doc.docx
-
《中共中央国务院关于加快推进生态文明建设的意见》.docx
-
《永生的眼睛》练习题附答案.docx
-
flow3d官方培训教程中的实例中文说明.docx
-
《宪法》《监察法》应知应会100题含答案.docx
-
EMS基础知识综合练习复习资料.docx
-
100以内退位减法500道带竖式空间可直接打印.docx
-
207声屏障施工组织设计.docx
-
30个科学小常识教学提纲.docx
-
JGJ59建筑施工安全检查标准评分表全套.docx
-
12幼儿园保育员培训活动记录表.docx
-
minecraft匠魂教程.docx
-
c语言课程设计学生成绩管理系统.docx
-
0503新闻传播学基本要求.docx
-
最新最新《专业技术人员职业道德》模拟考试题库500题含答案.docx
-
建筑与环境复习题.docx
-
武定跌落熔断器试验报告武定解析.docx
-
起重汽车吊装专项施工方案模板.docx
-
结构静力计算手册.docx
-
经纪人概论大纲word版.docx
-
张先法预制空心板施工方案.docx
-
建标44号文件费用组成.docx
-
高层住宅施工临时用电方案.docx
-
医疗器械注册管理办法4号令.docx
-
超级感人的爱情说说 唯美感人的爱情句子.docx
-
整理传感器期末复习题.docx
-
C#课本课后答案.docx
-
培训机构创业计划书讲课稿.docx
-
汽车驾驶员安全培训教材常用.docx
-
郑州大学法学院考研法学综合之中国法制史笔记.docx
-
长沙理工招聘单位及待遇.docx
-
初中美术教学反思十篇.docx
-
金华永康中考模拟试题永康市适应性考试试题docx.docx
