 第9章 串口通信.docx
第9章 串口通信.docx
- 文档编号:9852742
- 上传时间:2023-02-07
- 格式:DOCX
- 页数:39
- 大小:562.57KB
第9章 串口通信.docx
《第9章 串口通信.docx》由会员分享,可在线阅读,更多相关《第9章 串口通信.docx(39页珍藏版)》请在冰豆网上搜索。
第9章串口通信
第9章串口通信
9.1概述
单片机与外界进行信息交换,称为通信。
通信有并行通信和串行通信两种基本方式。
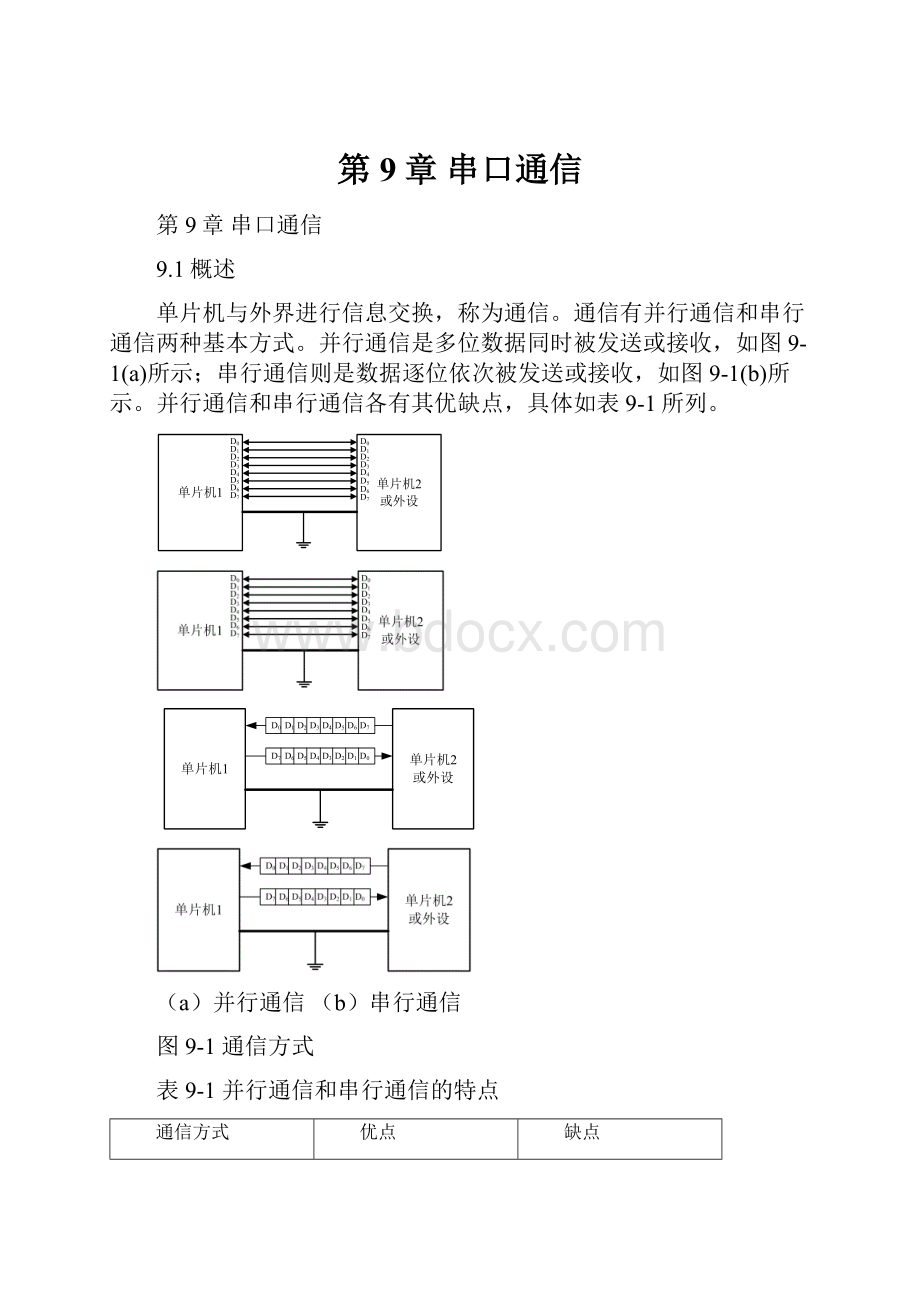
并行通信是多位数据同时被发送或接收,如图9-1(a)所示;串行通信则是数据逐位依次被发送或接收,如图9-1(b)所示。
并行通信和串行通信各有其优缺点,具体如表9-1所列。
(a)并行通信(b)串行通信
图9-1通信方式
表9-1并行通信和串行通信的特点
通信方式
优点
缺点
并行通信
多位数据同时传输,传送速度快
线路位数多,不便长距离传送
串行通信
适合长距离通信,节省传输线路,有一定的纠错能力
多位数据逐位依次传输,传送速度较慢
9.1.1串行通信
串行通信适合长距离、节省传输线、有纠错能力的突出优点,使其逐渐成为单片机与其它系统通信的主要方式。
串行通信又细分为异步通信和同步通信,单片机主要采用异步通信方式。
1、异步通信
异步通信数据按帧传输,一帧数据包含起始位、数据位、校验位和停止位。
异步通信凭借传输信息中设置的起始位、停止位来保持通信同步。
异步通信对硬件要求不高,容易实现且灵活,适用于数据的随机发送/接收,但因传送一个字节的数据就要建立一次同步,加上起始位、校验位和停止位,使得工作速度相对较低。
2、同步通信
同步通信传输的信息,是由1~2个同步字符和多字节数据位组成。
同步字符用于保持通信同步并作为起始位,用以触发同步时钟开始发送或接收数据;多字节数据之间不能有空隙,每位占用的时间相等。
同步通信传输速度快,但需要准确的时钟来实现收发双方的严格同步,硬件要求高,多用于批量数据传送。
9.1.2串行通信的制式
串行通信按照数据传送方向的不同,有三种传输方式:
1、单工制式
单工传输,是指通信双方传输信息时,只能从发送方单方向传送数据给接收方,如图9-2所示。
图9-2单工通信
2、半双工制式
半双工传输,是指通信双方都有接收器和发送器,都能够进行数据的发送和接收,但不能在同一时刻接收和发送数据,即发送时不能接收,接收时不能发送。
如图9-3所示。
图9-3半双工通信
3、全双工制式
全双工传输,是指通信双方均设有发送器和接收器,通信信道相互独立,既有发送信道又有接收信道。
因此,全双工传输可实现通信双方数据的同时发送和接收,即发送时可以接收,接收时也可以发送。
如图9-4所示。
图9-4全双工通信
51单片机内部的串行接口是全双工的,即它能同时发送和接收数据。
发送缓冲器只能写入而不能读出,接收缓冲器只能读出而不能写入。
串行口还具有接收缓冲功能,即从接收缓冲器中读出前一个已收到的字节数据之前,就可以开始接收第二字节数据了。
串行口的内部结构如图9-5所示。
图9-5串行口结构示意图
单片机知识:
串口缓冲器SBUF
串口缓冲器SBUF,是在物理上彼此独立的两个缓冲器:
一个是接收缓冲器,用于存放接收到的数据;另一个是发送缓冲器,用于存放待发送的数据。
所以,数据的发送和接收可以同时进行。
两个缓冲器共用一个地址99H,通过对SBUF的读、写语句,可以区分当前进行的操作是针对接收缓冲器还是发送缓冲器:
如果CPU在写SBUF,操作的对象就是发送缓冲器;而CPU在读SBUF时,操作的对象就是接收缓冲器了。
例如:
SBUF=send[i];//发送第i个数据
buffer[i]=SBUF;//接收数据
9.2单片机间的串口通信
功能说明:
单片机a与单片机b,通过串行口进行通信。
a机发送数据,b机接收a机发送的数据,并进行相应处理。
按键K1每按下一次,连接在b机P2.0引脚的蜂鸣器就报警鸣响一次,同时,连接在b机P2.7引脚的发光二极管D1闪烁一次。
按键K2按下一次,连接在b机P2.0引脚的蜂鸣器报警鸣响两次,同时,连接在b机P2.7引脚的发光二极管D1闪烁两次。
硬件说明:
1、硬件电路连接如图9-6所示,单片机a的P3.1引脚(TXD),连接到单片机b的P3.0引脚(RXD)。
2、按键K1和K2分别连接到单片机a的P1.0和P1.1引脚;
图9-6双机串口通信硬件连接图
程序清单如下:
//双机串口通信,a机发送数据程序
#include
#defineucharunsignedchar
sbitk1=P1^0;
sbitk2=P1^1;
uchari=0;
//************************************************************
voiddelay(uchari)//延时子函数
{
ucharj,k;
for(k=0;k for(j=0;j<110;j++); } //************************************************************ main()//主函数 { TMOD=0x20;//定时器1工作于方式2 TL1=0xf4;//波特率为2400b/s TH1=0xf4; TR1=1; SCON=0x50;//设置串行口工作在方式1,允许接收 while (1) { if(k1==0) { delay(5); if(k1==0) i=1; } if(k2==0) { delay(5); if(k2==0) i=2; } if(i! =0) { SBUF=i;//发送数据i while(TI==0);//查询等待发送是否完成 TI=0;//发送完成,TI由软件清0 i=0; } } } //双机串口通信,b接收数据程序 #include #defineucharunsignedchar sbitbeep=P2^0; sbitD1=P2^7; ucharx,y; //************************************************************ voiddelay(uchari)//延时子函数 { ucharj,k; for(k=0;k for(j=0;j<110;j++); } //************************************************************ main()//主函数 { TMOD=0x20;//定时器1工作于方式2 TL1=0xf4;//波特率为2400b/s TH1=0xf4; TR1=1; SCON=0x50;//设置串行口工作在方式1,允许接收 ES=1;//开串行口中断 EA=1;//开总中断允许位 while (1) { if(x==1)//k1控制报警闪烁一次 { beep=0; D1=0; delay(200); beep=1; D1=1; } if(x==2)//k2控制报警闪烁两次 { for(y=x;y>0;y--) { beep=0; D1=0; delay(100); beep=1; D1=1; } } } } //************************************************************ voidserial(void)interrupt4//串口中断类型号为4 { EA=0;//关中断 RI=0;//软件清除中断标志位 x=SBUF;//接收数据 EA=1;//开中断允许位 } 单片机知识: 串行口 1、串行口的工作寄存器 51串行口工作时,需要进行相关寄存器的设置。 只有设置正确,串行口才能正常工作。 需要进行设置的寄存器,有串行口控制寄存器SCON、电源控制器PCON、中断允许寄存器IE和中断优先级寄存器IP。 其中IE和IP寄存器已在第4章有过详细介绍,此处重点介绍SCON和PCON。 (1)串行口控制寄存器SCON 串行口控制寄存器SCON是一个8位的寄存器,如表9-2所列。 系统复位时,SCON中的所有位都被清0。 其各位功能及含义如下: 表9-2SCON寄存器 位7 位6 位5 位4 位3 位2 位1 位0 SM0 SM1 SM2 REN TB8 RB8 TI RI ◆位7、位6——SM0、SM1: 串行口操作方式选择位。 SM0和SM1这两个选择位组合后,对应串行口的四种工作方式,具体如表9-3所示。 表9-3串行口方式选择 SM0SM1 方式 功能说明 波特率 00 0 同步移位寄存器方式,8位全部是数据,无起始停止位 fosc/12 01 1 10位UART(其中1位起始位,8位数据位,1位停止位) 可变 10 2 11位UART(其中1位起始位,9位数据位,1位停止位) fosc/64或fosc/32 11 3 同方式2 可变 ◆位5——SM2: 方式2和3的多机通信使能位。 在方式2或方式3中,若SM2为0,则不论接收到的第9位数据RB8是0还是1,均可使接收到的数据进入SBUF,并激活接受中断标志位RI;若SM2为1,且接收到的第9位数据RB8为1,则接收到的数据进入SBUF,并激活接受中断标志位RI;若SM2为1,且接收到的第9位数据RB8为0,则接收到的数据被丢弃,接收中断标志RI不会被激活。 在方式1中,若SM2=1,则只有在收到有效的停止位时,才会激活RI。 在方式0中,SM2必须置为0。 ◆位4——REN: 串行数据接收允许位。 REN=1,允许串行口接受数据;REN=0,禁止串行口接受数据。 该位由软件置位或清零。 ◆位3——TB8: 方式0和方式1中不使用该位。 在方式2和方式3中,TB8中的值(1位二进制数)是发送数据的第9位,可按需要由软件指定其功能(数据的奇偶校验位或多机通信中的地址帧/数据帧的标志,一般1是地址帧,0是数据帧)。 ◆位2——RB8: 是方式2和3中已接收到的第9位数据。 在方式1中,若SM2=0,RB8是接收到的停止位。 在方式0中,不使用RB8位。 ◆位1——TI: 发送中断标志位。 在方式0中,当串行发送完8位数据时,由硬件置1,表明发送中断有请求;在其他方式中,在发送停止位时,由内部硬件置1。 需要特别注意的是,无论在何种方式,该位都必须由软件来清0。 ◆位0——RI: 接收中断标志位。 在方式0中,当串行接收到8位数据结束时,由硬件置1。 无论在何种方式,该位都必须由软件来清0。 (2)电源控制器PCON PCON是一个特殊功能寄存器,它是一个8位寄存器。 在串口通信中,只用到8位中SMOD这一位(位7)。 该位是波特率选择位,在串行口工作在方式为1、2或3时,若SMOD=1,则波特率提高一倍。 复位时,SMOD值为0。 (3)中断允许寄存器IE 中断允许寄存器IE的位4(ES)是串行口中断允许位,ES=1,允许串行口中断(总开关EA=1时);ES=0,禁止串行口中断。 中断允许寄存器IE如表9-4所列。 表9-4IE寄存器 位7 位6 位5 位4 位3 位2 位1 位0 EA ES ET1 EX1 ET0 EX0 (4)中断优先级寄存器IP 中断优先级寄存器IP的位4(PS),是串行口中断优先级控制位。 PS=1,串行口定义为高优先级中断源;PS=0,串行口定义为低优先级中断源。 2、串行口工作方式 串行口的工作方式由SM0和SM1定义,编码和功能如表9-3所示,下面分别介绍4种工作方式及其用途。 (1)方式0 串行口的工作方式0为同步移位寄存器输入输出方式,可外接移位寄存器,以扩展I/O口,也可外接同步I/O设备。 当串行口在方式0下发送(输出)数据时,数据串行逐位从RXD引脚输出;而TXD引脚则作移位脉冲的输出端,输出移位需要的同步时钟。 当串行口在方式0下接收(输入)数据时,RXD端为数据输入端,TXD仍为同步脉冲信号输出端。 接收器接收RXD端输入的数据信息,波特率是振荡频率的1/12。 方式0主要用于I/O扩展的场合。 此方式下的串行口,通过外接串入并出移位寄存器,可扩展输出口;通过外接并入串出移位寄存器,可扩展输入口。 串行口工作在方式0时,需要注意以下两点: ①方式0发送或接收完8位数据后,发送中断标志TI或接收中断标志RI,由硬件置1。 但在CPU响应了发送中断或接收中断的中断请求,并转入中断服务程序时,CPU并不自动将TI或RI清0,因此,用户必须编程将中断标志TI或RI清0。 ②串行口在方式0下工作时,SM2位必须为0。 (2)方式1 串行口工作在方式1时,是一个波特率可变的10位异步通信接口,即1位起始位,8位数据位(低位在先)和1位停止位,其中起始位和停止位是在发送时自动插入的。 波特率的大小,取决于定时器1或定时器2的溢出速率。 当串行口在方式1下发送(输出)数据时,TI必须为0。 当CPU执行任何一条以SBUF为目的寄存器的指令或语句,都启动一次发送。 数据发送完时,发送中断标志位TI置1。 当串行口在方式1下接收(输入)数据时,其接收的前提条件是,串行口控制寄存器SCON的REN位为1,同时还要满足两个条件: ①RI必须为0,②SM2=0或者接收到的停止位为1,否则接收到的数据会被丢弃。 如果正确接收,则接收到的数据被装载进SBUF和RB8位,接收中断标志位RI被置1。 方式1一般多用于两个单片机之间的数据通信。 串行口工作在方式1时,发送中断标志TI或接收中断标志RI,须由用户清0。 ).8F下=1;______________________________________________________________________________________________________________(3)方式2和方式3 串行口工作在方式2和方式3,是11位的异步通信接口。 方式2和方式3的操作过程完全一样,仅仅是波特率不同。 方式2的波特率固定,为fosc/32或fosc/64;方式3的波特率可变,取决于定时器1或定时器2溢出速率。 方式2和方式3的帧格式如表9-5所示。 表9-5方式2和方式3的帧格式 位0 位1 位2 位3 位4 位5 位6 位7 位8 位9 位10 起始 D0 D1 D2 D3 D4 D5 D6 D7 TB8/RB8 停止 当串行口在方式2或者3下发送(输出)数据时,任何一条写SBUF的语句,都可启动一次发送。 当第9位数据(TB8)输出之后,发送中断标志位TI被置1。 当串行口在方式2或者3下接收(输入)数据时,其前提条件依然是,SCON寄存器的REN位为1;同时还要满足两个条件——RI必须为0,SM2=0或者接收到的停止位为1,否则接收到的数据会被丢弃。 如果正确接收,则接收到的数据被装载进SBUF和RB8位,接收中断标志位RI被置1。 需要注意的是,在方式2和方式3中,装入RB8的是第9位数据,而不是停止位;但在方式1中,装入的RB8第9位是停止位。 3、波特率 串行口每秒钟发送(或接收)的二进制数的位数称为波特率。 设发送一位数据所需要的时间为T,则波特率为1/T。 为保证数据的正确发送和接收,单片机间必须使用相同的波特率。 串行口以方式0工作时,波特率固定为时钟振荡器频率的1/12;以方式2工作时,波特率为时钟振荡器频率的1/64或1/32(PCON中的SMOD位为1对应1/32;PCON中的SMOD位为0对应1/64)。 方式1和3的波特率,由定时器1的溢出率所决定。 当定时器1作波特率发生器时,波特率由下式确定: 波特率=2SMOD×(T1溢出率)/n 式中,T1溢出率,是定时器1在1秒钟内溢出的次数。 n为32或16(若SMOD=0,则n=32;若SMOD=1,则n=16)。 在串行通信的实际使用中,单片机的晶振频率必须选用11.0592MHz,否则,在定时器1的初值计算时,将会出现晶振频率不能被整除的问题,使波特率存在较大误差,从而导致串行通信的质量变差。 9.3单片机多机通信 9.3.1多机通信概述 承前所述,串行口以方式2和方式3接收时,若SM2为1,则只有当接收器接收到的第9位数据为1时,数据才被装入接收缓冲器,并将接收中断标志RI位置1,同时向CPU发出中断申请;如果接收到的第9位数据为0,则不产生中断标志,接收到的数据也将被丢弃;而SM2为0时,当接收到一个数据信息后,不管第9位数据是1还是0,都使接收中断标志位RI置1,并将接收到的数据装入接收缓冲器。 通过上述这种方式,就可以实现多个单片机之间的通信。 如图9-7所示,为一种简单的主从式的多机通信系统,主机控制它与各个从机之间的通信,而各个从机之间的通信也必须经过主机才能实现,可见,从机是被动的。 TXDRXD 89C51 从机3 图9-7多机通信连接原理图 从机的初始化程序(或相关的处理程序)中,将从机的串行口设置在方式2或方式3下,用于接收数据,且置SM2为1和允许串行口中断。 当主机准备发送一数据块给从机时,主机首先送出一个地址字节,用于辨认目标从机。 可用发送数据的第9位来区别当前发送的是地址字节信息还是数据字节信息: 发出地址信息时第9位为1,发数据(包括命令)信息时第9位为0。 主机发送的是地址信息,所以发送数据的第9位为1;而各从机接收到主机发送来的地址信息中,接收到的第9位信息(RB8)必定为1。 由于此时所有从机的SM2都为1,所以,所有从机将其接收中断标志RI置1,并将接收到的地址信息存进SBUF中。 这时,让每一台从机都检查一下,看自己的地址与接收到主机发送来的地址是否相符。 若某一台从机的地址与接收到的地址相符,则将该从机的SM2位清0;其它地址不相符的从机,则保持SM2=1的状态不变。 地址相符的从机,将SM2位清0的目的,是准备接收主机即将发送来的数据(或命令)。 在主机发送数据时,地址相符的从机由于SM2=0,则不论接收的第9位(RB8)是0还是1,它都将接收到的数据存入SBUF,并激活接收中断标志RI。 相反,那些地址不相符的从机,由于SM2依旧保持为1,则当主机发送数据时(主机发送的第9位数据是0,0代表的是数据,而1代表的是地址),这些从机接收到的第9位数据也是0,于是,这些从机将所接收到的数据丢失,同时并不激活接收中断标志位RI。 这样,就实现了主机仅对地址相符的那一台从机传输数据信息的功能。 9.3.2单片机多机通信实例 功能说明: A、B、C三个单片机中,A为主机,B和C为从机。 独立按键K1是主机A外部中断0的中断源。 当K1被第一次按下时,数码管1显示数字1,数码管2显示字符“A”(“A”是主机A的编号);同时,连接到主机A上P1.0引脚的LED灯,点亮1秒钟时间。 当K1被第二次按下时,数码管1显示数字2,数码管2显示字符“B”(“B”是从机B的编号,此值由从机B传回到主机);同时,连接到从机B上的P1.0引脚的LED灯,点亮1秒钟时间。 当K1被第三次按下时,数码管1显示数字3,数码管2显示字符“C”(“C”是从机C的编号,此值由机C传回到主机);同时,连接到从机C上的P1.0引脚的LED灯,点亮1秒钟时间。 当K1被第四次按下时,数码管1显示数字1,数码管2显示字符“A”(“A”是主机A的编号);同时,连接到主机A上P1.0引脚的LED灯,点亮1秒钟时间……。 上述过程循环进行。 硬件说明: 1、硬件电路如图9-8所示。 主机A的P0口和P2口,分别连接共阴数码管1和2,数码管使用74HC573驱动;独立按键K1连接到主机A的P3.2引脚(外部中断0输入引脚);主机A上P1口的P1.0引脚连接有一只发光二极管D3;从机B和从机C的P3.1引脚,都连接到主机A的P3.0引脚;从机B和从机C的P3.0引脚都连接到主机A的P3.1引脚。 2、从机B和从机C,除跟主机通过串行线连接外,其P1口分别连接一只发光二极管。 图9-8单片机多机通信硬件连接图 程序清单如下: //多机通信主机A程序 #include #defineucharunsignedchar #defineuintunsignedint ucharcodetable[]={0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07, 0x7F,0x6F,0x77,0x7C,0x39,0x5E,0x79,0x71}; ucharmode; sbitD3=P1^0; //************************************************************ voidinit() { TMOD=0x20;//设定时器1的工作方式为方式2 TH1=0xfd;//设置串行口波特率为9600 TL1=0xfd; TR1=1; SCON=0xd0;//设置串行口的工作方式为方式3,允许接收 ES=1;//开串行口中断 EX0=1;//开外部中断0 IT0=1;//INT0下降沿触发 EA=1;//开总中断允许位 TI=0; } //************************************************************ voiddelay(uinti)//延时子函数 { uintj,k; for(k=0;k for(j=0;j<110;j++); } //************************************************************ voidserial_procedure(ucharc)//本机串口发送程序 { SBUF=c; while(TI==0); TI=0; } //************************************************************ voidhost_control(ucharAdd,ucharCmd)//主机控制处理程序 { TB8=1;//地址信息标志 serial_procedure(Add); delay(50); TB8=0;//数据信息标志 serial_procedure(Cmd); delay(50); } //************************************************************ voidINT_EX0(void)interrupt0//外中断0中断处理程序 { P0=table[mode];//模式数据送P0口显示 if(mode


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 第9章 串口通信 串口 通信
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《JAVA编程基础》课程标准软件16级.docx
《JAVA编程基础》课程标准软件16级.docx
-
《分数的初步认识》.docx
-
《金属钠的性质与应用》教学设计.docx
-
《蚕妇》.docx
-
《会计》教材Word版第14章非货币性资产交换.docx
-
《与朱元思书》教学案例及反思.docx
-
《小壁虎借尾巴 》教案.docx
-
1第一部分 辅导员岗位基本知识.docx
-
09年CFO复习题.docx
-
2G1计算书.docx
-
17 古诗五首夜雨寄北一等奖教案.docx
-
240T15mw机组整体启动方案解析.docx
-
485总线设计方案加上位机扩展.docx
-
Aspose Word模板使用总结.docx
-
CDMA掉话分析.docx
-
C++新闻信息管理系统.docx
-
《HSE管理体系的策划与运行》.docx
-
c语言改错题及答案.docx
-
CMS7000使用说明资料.docx
-
《财经法规与会计职业道德》模拟卷考试试题及答案资料.docx
-
《大众传播媒介的更新》教案2.docx
-
《教育知识与能力》中学版全国教师资格考试复习资料教学教材.docx
-
EPC施工组织设计1.docx
-
ERP在服装行业的信息化应用可行性研究报告.docx
-
《项羽之死》教案人教版高二选修教学设计.docx
-
《公共关系实务》总复习资料.docx
-
FLUKE744过程校准仪经典实例免费给大家会让你未来的道路更通达.docx
-
《护士条例》试题.docx
-
2F男鞋统装规范84.docx
-
4测试用例修复方法与工具.docx
-
MC尼龙轮项目可行性研究报告.docx
-
Weblogic Server系统管理手册.docx
-
安全质量大检查实施细则Word下载.doc
-
左所小学教职工考核方案2018-3Word文档下载推荐.doc
-
小课题研究活动简报Word格式文档下载.doc
-
市统计局贯彻落实厉行节约八项要求工作的汇报Word格式文档下载.doc
-
安全隐患排查治理工作方案文档格式.doc
-
师徒老带新(师徒结对)培训计划Word格式.doc
-
开展学习道德模范活动方案Word文档下载推荐.doc
-
崔允有效教学读后感Word格式文档下载.doc
-
整理冬季清雪工作方案Word格式文档下载.docx
-
工业园智能化建设方案Word格式.doc
-
浙美版初中九年级下册美术教案备课本 全册Word下载.docx
-
弟子规学习活动策划书Word格式.doc
-
我国上市银行现金股利分配影响因素研究文档格式.doc
-
主变安装作业指导书解读Word文件下载.docx
-
重点工作推进会讲话稿通用版Word格式.docx
-
少先队制度建设Word文档格式.doc
-
开盘策划总案Word文档下载推荐.doc
-
工会机关党建工作要点Word文档格式.doc
-
开展校风校纪整治月活动的方案Word文件下载.doc
