 F2S飞控使用说明飞控OSD显示界面数据定义OSD数据解释飞机.docx
F2S飞控使用说明飞控OSD显示界面数据定义OSD数据解释飞机.docx
- 文档编号:9554960
- 上传时间:2023-02-05
- 格式:DOCX
- 页数:11
- 大小:629.49KB
F2S飞控使用说明飞控OSD显示界面数据定义OSD数据解释飞机.docx
《F2S飞控使用说明飞控OSD显示界面数据定义OSD数据解释飞机.docx》由会员分享,可在线阅读,更多相关《F2S飞控使用说明飞控OSD显示界面数据定义OSD数据解释飞机.docx(11页珍藏版)》请在冰豆网上搜索。
F2S飞控使用说明飞控OSD显示界面数据定义OSD数据解释飞机
F2S飞控使用说明
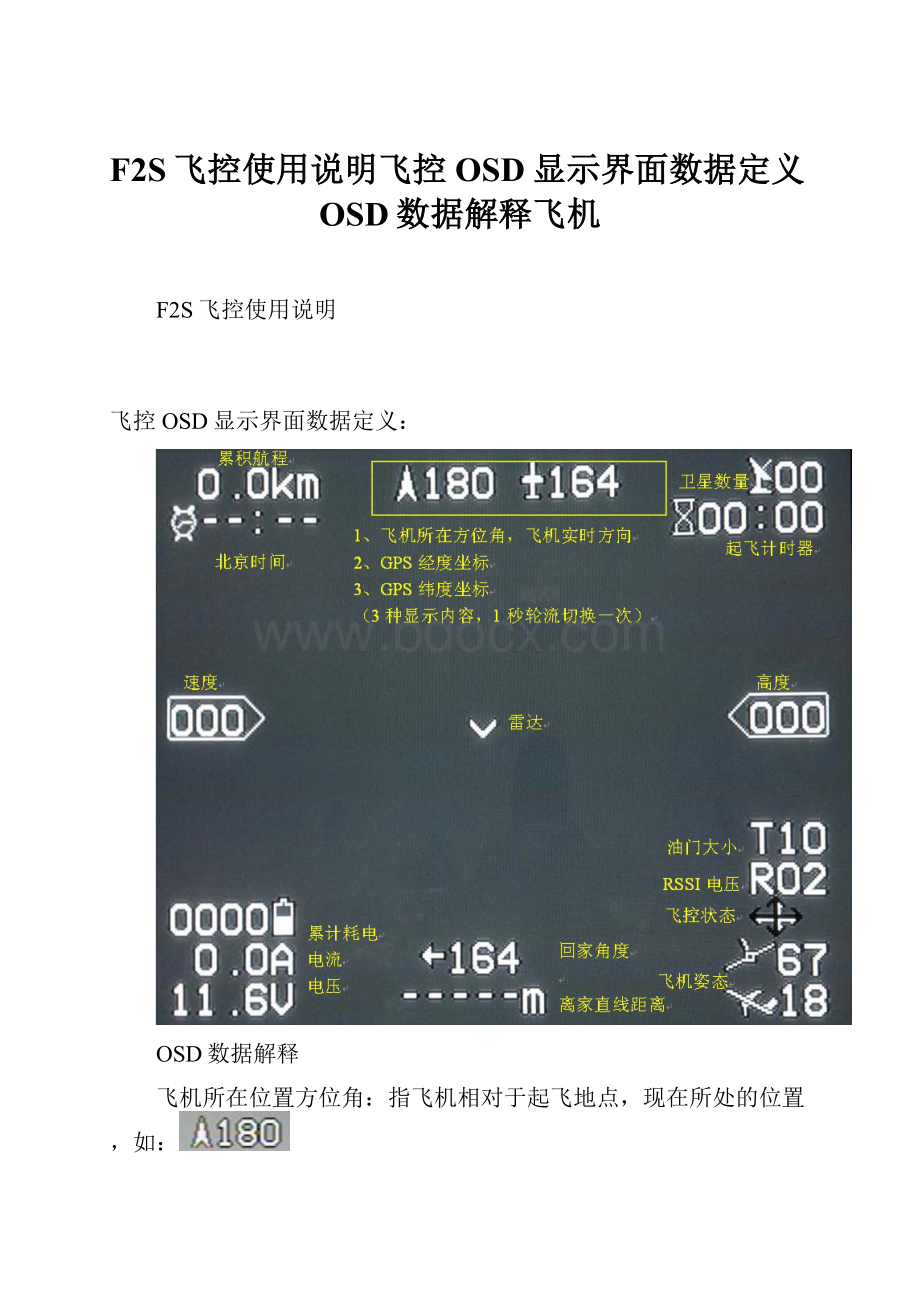
飞控OSD显示界面数据定义:
OSD数据解释
飞机所在位置方位角:
指飞机相对于起飞地点,现在所处的位置,如:
,指飞机现处于相对于飞起地点正南方向(正北为0度,180度为正南)。
飞机前进方向:
指飞机现在正在前进的方向,如:
,指飞机正在向53度的方向(正北为0度)前进。
飞机返航角度:
指飞机当时回家的偏差角度,如
,指飞机向左53度,为回家的方向。
再如:
,指飞机现在向右68度,为回家的方向!
返航角度是最重要的数据之一!
尤其要注意。
直线距离:
指飞机距离回家位置的地面直线距离,单位是米。
高度:
相对于“家”的位置的相对高度。
单位是米。
航程:
飞机累计飞行距离。
T:
飞控油门大小,此数值与设置里的最低油门相一致,便于飞行时候判断油门大小
RSSI:
这个是飞控RSSI接线端口的电压值,单位为0.1V,测量电压范围为0-3.3V。
如显示R32,则表示电压为3.2V。
这个端口常用于连接接收机场强段,以显示接收机信号的好坏情况,如果是433接收机,则显示的是丢包率,电压3.2(或者3.3)为信号100%接收,0为失控。
根据这个数值,可以看出接收机的状况。
飞机姿态:
显示的是飞机俯仰的角度和左右倾斜的角度,根据向小飞机的图标,可以看出飞机实时姿态。
如
,表示飞机右倾3度,飞机机头向下1度。
起飞计时器:
当油门超过30%后,保持1秒以上,计时器就开始计时。
当开始计时后,设置模式就进不去了,必须重新接电,在计时器没有开始计时前,才能进入设置模式。
北京时间:
指飞行的时间,可以用于记录。
雷达:
中间表示“家”的位置,小飞翼表示飞机,飞翼的方向表示飞机前进的方向。
雷达屏幕上,上北下南左西右东,表示飞机做处的位置。
角度说明图:
安装飞控的时候F2飞控箭头方向朝向机头。
OSD设置界面定义(仅供参考,一样的):
有关设置方法和接线方法请参考以下视频链接(此视频是F2飞控的视频教程,F2S接线方法可以仅供参考,具体详细细节需要亲们对照着F2S的定义图来接线,大致上都是差不多的):
飞控主板接线定义:
图文详解:
注意:
电流计接的多少V电压输入,图传和摄像头那里的供电就会输出多少V电压,所以图传和摄像头不支持所输入电压V数的需要外接UBEC供电或者单独供电。
输入信号:
1:
副翼通道
2:
水平尾翼通道
3:
油门通道
4:
模式选择通道
(GPS没有定位之前,三段开关控全部都是平衡模式,只有收到6颗星以上,才可以转换出其他控制模式。
三段开关的飞行模式,可以实现三种飞行模式之间切换:
(1:
平衡模式:
三段开关高档位置。
飞控负责保持飞机相对于地面的姿态。
实现松杆飞机水平飞行。
(2:
锁定模式(2.0版本以后):
三段开关中间位置。
锁定模式就是副翼通道或者俯仰通道,当摇杆回到中点,飞控就自动锁定方向或者高度的模式,超过中点,就转为平衡模式。
这样一个锁定模式,就可以实现定高定向飞行、定高不定向飞行、定向不定高飞行,平衡模式等4种飞行模式,使用很方便。
(3:
返航模式:
三段开关低端位置。
飞控全自动返航,油门由设定的而最低油门和接收机油门决定,去其中的大的,为输出实际油门。
如果接收机失控保护设置为返航模式,即可实现失控后,飞机自动返航。
5:
手动控制通道(切换全手动模式、飞控模式、航点模式。
除非飞行高手,强烈建议空着不连接!
放弃手动模式)
输出信号:
6:
副翼通道(无副翼飞机接到垂直尾翼通道舵机)
7:
水平尾翼通道
8:
油门通道(接电调)
9:
输出4通道,连接V尾飞机的一侧尾翼,例如“死胖子”飞机,正常类型飞机不使用。
FPV固定翼飞机一般不推荐使用方向舵,转弯直接用副翼就行了.如果想用方向舵的模友可将方向舵的舵机直接接在遥控接收机的4通道上面,不用通过飞控。
使用中需注意的地方:
一:
电流计接的多少V电压输入,图传和摄像头那里的供电就会输出多少V电压,所以图传和摄像头不支持所输入电压V数的需要外接UBEC供电或者单独供电。
二:
飞机失控返航的2个前提.一是正确的设置失控保护。
二是设定了当时的“家”的位置。
两个条件缺一不可,所以要注意。
除了切糕433接收机,其他接收机的失控保护都不是永久性的,随时可能丢失(比如先开接收机,后开控,很多接收机就会丢失失控保护!
)。
如果使用一般接收机,每次起飞后,都需要关控测试下是否正确返航;设置回家位置,建议卫星数量再8颗以上,这样GPS数据才稳定,起飞之前,检查一下距离家的直线距离不要超过10米,以确认回家位置是设定好的,然后才能远飞!
尤其新手,FPV要谨慎!
每次做好所有检查,再远航。
飞控调节步骤:
首先按照输入输出通道连接遥控接收机:
连接显示器,看OSD设置界面,1-8行对应的设置内容如下。
(OSD设置界面能出现的前提是计时器没有开始计时!
当油门通道大于30%保持1秒以上,启动计时器,此后就不会出现设置界面,需要设置,必须重新接电。
)
一、调节遥控器副翼通道和俯仰通道的的正反向:
遥控器油门通道放到最低,接通电池,向右掰动副翼通道摇杆(幅度要足够),保持5秒钟,如果出现调试界面,则说明副翼通道正反设置正确,如果没有OSD设置界面,则将副翼通道反相。
直到右掰副翼通道,能出现OSD设置界面。
出现OSD设置界面后,上下摆动俯仰通道,上下遥控俯仰摇杆,如果显示箭头与上下动作一致,则俯仰通道正反设置正确。
否则,反相俯仰通道。
二、设置参数
调节横滚控制的正反相和反馈大小。
将箭头指向AIL通道的反馈系数上,上下俯仰摇杆,数据会在-120----+120之间,正负表示反馈方向,选择正确的反馈方向和大小(一般在正负80-100之间,如果反馈太大,会引起抖动)
调节俯仰控制的正反相和反馈大小。
将箭头指向ELE通道的反馈系数上,上下俯仰摇杆,数据会在-120----+120之间,正负表示反馈方向,选择正确的反馈方向和大小(一般在正负80-100之间,如果反馈太大,会引起抖动)
设置返航模式下,最低油门比例。
移动到THR-L设置界面,上下俯仰摇杆,是指数据会在10-100之间变化。
表示返航模式下,最低油门为30%-100%。
此数值为最低返航模式下的油门(其他模式下,用户完全控制油门),如果实际油门大于最低油门,按照实际油门输出(举例:
最低油门设置为60%,实际接收机输出70%,则飞控按照70%输出,设置最低油门60%,实际油门为10%,则输出60%的油门。
返航模式下,最低油门触发条件为速度超过4公里时速,如果返航模式下,移动速度超过4公里时速,则最低油门自动触发。
否则按照接收机的实际油门大小输出。
这样设计的好处是:
接收机的油门失控保护如果是0油门,飞机落地后,因为不移动,油门自动关闭。
设置返航高度。
移动到设置返航高度界面下,上下俯仰摇杆,数值会轮流在50、100、150…..500、---之间变化,表示返航的最总高度为---、50米、100米。
。
。
。
。
(---)表示保持切返航时的高度(返航过程中,高度不变),返航过程中,飞控会按照一定比例,渐渐降低或者升高高度。
直到最终到达设置高度。
注意一定要油门给够,如果低于不能维持平飞的油门,飞机容易出现螺旋。
油门大小自己根据自己飞机情况,自己掌握。
设置飞机类型:
有2种飞机类型可以选择,飞翼模式和正常模式。
选择的时候,向右掰动副翼通道,直到飞机类型变为相应的图标。
设置回家位置:
如果GPS定位的卫星超过8个,将设置箭头放置于设定回家位置,向右掰动副翼通道,保持5秒钟,测试显示GPS“等待。
。
。
”表示已经设置成功。
同一地点,只需要设置一次,以后地点不变的话,可以一直保留,直到人为改变。
此设置很重要,是保证飞机安全回家的重要条件。
传感器标定:
每次新安装到一个飞机上,需要标定一次。
将飞机保持真实的平飞姿态(机翼保持左右水平,机翼下翼面仰角5-8度左右),保持绝对静止不动,然后向右掰动副翼通道,保持5秒钟,直到显示“沙漏”图标,继续保持不动,等待传感器标定,时间大约在10秒左右标定完成(期间飞机保持静止状态不动)。
电压校准设置:
上下掰动俯仰摇杆,这个电压值会调整,将此电压值调整到正确的电压值上即可。
退出并保存:
向左掰动副翼通道,直到退出设置界面,即保存。
所有保存数据永久有效,除非人为改变。
飞控飞行模式图形解释:
定高模式:
飞控保持飞机高度不变,左右可以直接按照平衡模式控制。
此时需要注意,油门足够,不要低于平飞的最低油门。
否则会导致飞机螺旋。
定高定向模式:
飞控维持飞机高度和航向不变。
此模式适合向远处飞,这样不用人事科调整方向,是FPV中最具有实用性的操作)
定向不定高模式:
飞控保持飞机航向角度,高度转为平衡模式,这样可以快递爬升或者降低高度。
自动返航模式:
按照设定的高度(或者保持高度),自动返航,需要注意的是此模式下。
油门是选择最低设置油门和接收机输出油门中最大的一个,作为控制电调的输出油门。
平衡模式:
飞控按照手柄控制飞机姿态。
松手,飞机就自动回复水平飞行。
手动模式:
完全手动飞行,飞控不参加控制(此模式需要一定操作水平,强烈建议在FPV中不要使用!
可以不连接输入通道5,默认完全放弃手动。
)
常见问题:
1:
飞机在高速或者俯冲的时候,为什么飞机会左右震动?
答:
飞机副翼的反馈系数有点大,反馈值大了,会导致飞机出现左右震动,适当调小这个数值,飞机就会平稳,建议一般设置正负70-90之间。
2:
飞控需要不需要减震措施?
答:
飞控需要适当考虑减震,尤其是油机或者飞控安装距离电机近的飞机。
减震办法很多。
皮筋悬空、泡沫座、飞控垫个硬币等。
一般电动飞机,只需要适度处理即可,大多数情况,,对飞控对震动不敏感,影响不大。
3:
U2飞控的坐标显示怎么和实际差别很大?
答:
经纬度显示有很多种格式,本飞控显示的是按照GPS标准的输出格式,度、分为60进制;秒是百分之,如果转换为60进制的时候,小数点后数据需要乘以60。
具体转换方式如下:
OSD显示:
E10428.344–东经104度、28分、20.64秒(60*0.344=20.64)
OSD显示:
N4347.789–北纬43度、47分、47.34秒(60*0.789=47.34)
4:
飞控在平衡模式切换其他模式的时候,飞机会突然降低(或爬升)几米,然后才能稳住。
答:
这个有3种可能,1是飞机重心不对、2是舵机中立点没有调好,3是飞控没有标定。
解决的办法,只要将其中任一方面调整好,就可以。
建议调整顺序:
在手动模式下,遥控器微调置中,调节舵机,使飞机能平稳飞行的姿态。
然后在按照说明,标定飞控。
就可以消除这个现象。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- F2S 使用说明 OSD 显示 界面 数据 定义 解释 飞机
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《Java程序设计》考试大纲及样题试行.docx
《Java程序设计》考试大纲及样题试行.docx
-
《工业企业管理》自学任务书.docx
-
《短歌行》原文翻译及赏析.docx
-
《跳水》教案3.docx
-
《基于MATLAB的信号与系统实验指导》编程练习.docx
-
《你是最棒的》教学设计.docx
-
《选修4化学反应原理》知识点总结整理超全.docx
-
2环境应急监测试题资料.docx
-
《自动化仪表工程施工及验收规范》GB50093仪表安装检验批.docx
-
09年法律硕士民法预热辅导第2102讲完整篇doc.docx
-
6阅读能力阅读方法指什么.docx
-
《豆蔻镇的居民和强盗》读后感.docx
-
CMYK色值参考.docx
-
3121护理查对制度.docx
-
《草莓》课堂教学课件5篇.docx
-
CCNA完整知识点.docx
-
《合理安排时间》说课稿.docx
-
18我的伯父鲁迅先生.docx
-
3dmax授课计划doc.docx
-
《中共中央国务院关于加快推进生态文明建设的意见》.docx
-
《永生的眼睛》练习题附答案.docx
-
flow3d官方培训教程中的实例中文说明.docx
-
《宪法》《监察法》应知应会100题含答案.docx
-
EMS基础知识综合练习复习资料.docx
-
100以内退位减法500道带竖式空间可直接打印.docx
-
207声屏障施工组织设计.docx
-
30个科学小常识教学提纲.docx
-
JGJ59建筑施工安全检查标准评分表全套.docx
-
12幼儿园保育员培训活动记录表.docx
-
minecraft匠魂教程.docx
-
c语言课程设计学生成绩管理系统.docx
-
0503新闻传播学基本要求.docx
-
部编人教版语文三年级上册教材分析教学计划及教学进度.docx
-
财务会计实习报告模板三篇范文word版 11页.docx
-
北师大数学八年级上第三章图形的平移与旋转二.docx
-
安全防护施工方案.docx
-
采购合同中的技术指标和质量要求是指什么.docx
-
CRTSⅢ型板式无砟轨道各工序施工记录表和验收记录表.docx
-
晨跑作文500字.docx
-
XX小学五年级数学教师年度考核工作总结.docx
-
1111屋面工程专项施工方案.docx
-
ps让照片模糊变清晰.docx
-
部编人教版16年级语文下册易错字汇总专项练习.docx
-
20XX国培校长研修总结.docx
-
TCL员工手册.docx
-
20万只肉羊屠宰加工生产线建设项目可行性研究报告.docx
-
K12教育学习资料学习北京市西城区学年七年级英语下学期期末试题扫描版.docx
-
北京高考英语试题及答案.docx
-
初中期末考成绩.docx
-
XX年八年级物理下册全册导学案新人教版.docx
-
oracle安全加固方案.docx
