 伺服轴半闭环和全闭环控制的切换方法.docx
伺服轴半闭环和全闭环控制的切换方法.docx
- 文档编号:950324
- 上传时间:2022-10-14
- 格式:DOCX
- 页数:46
- 大小:6.31MB
伺服轴半闭环和全闭环控制的切换方法.docx
《伺服轴半闭环和全闭环控制的切换方法.docx》由会员分享,可在线阅读,更多相关《伺服轴半闭环和全闭环控制的切换方法.docx(46页珍藏版)》请在冰豆网上搜索。
伺服轴半闭环和全闭环控制的切换方法
伺服轴半闭环和全闭环的切换
一、参数设置
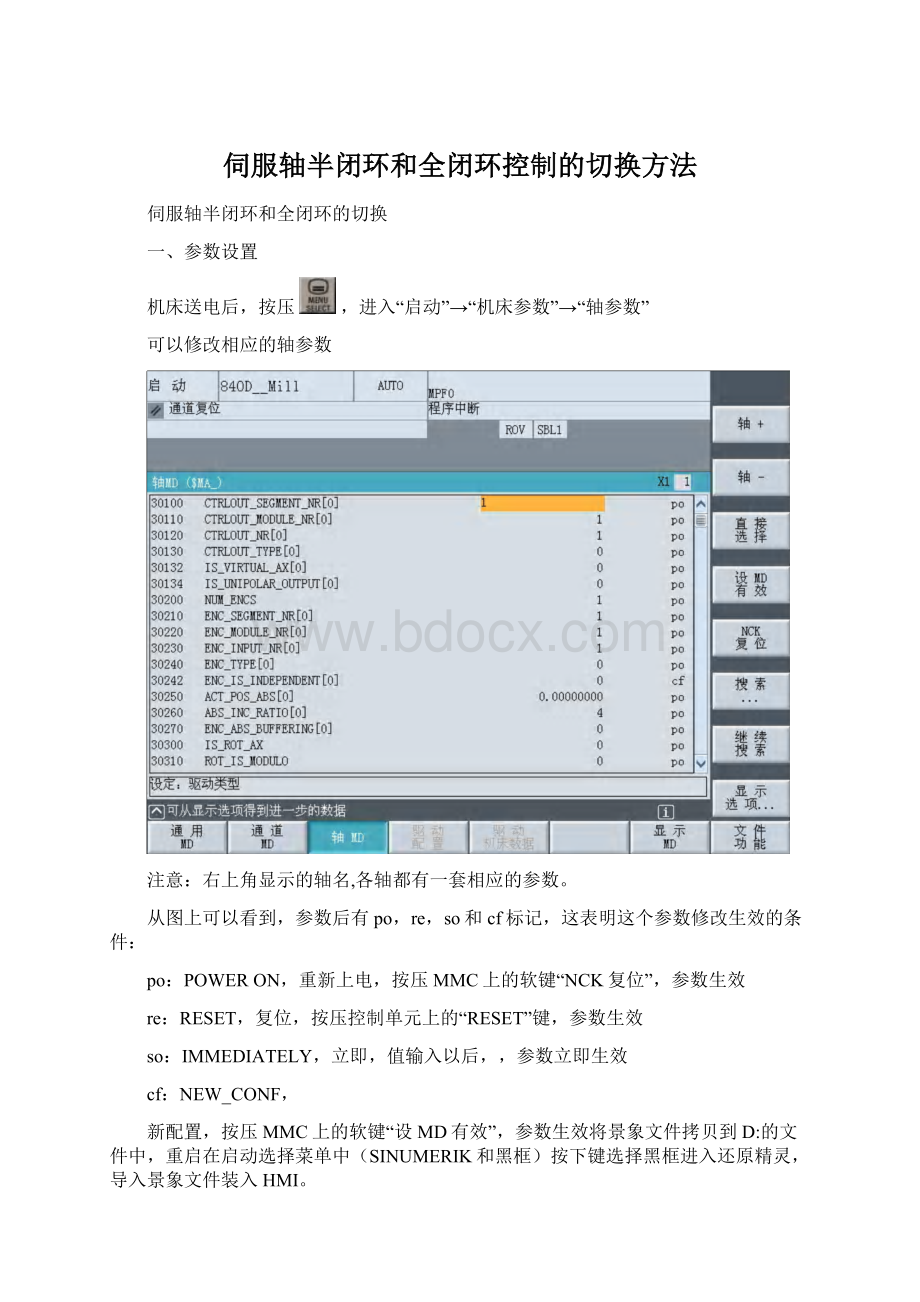
机床送电后,按压,进入“启动”→“机床参数”→“轴参数”
可以修改相应的轴参数
注意:
右上角显示的轴名,各轴都有一套相应的参数。
从图上可以看到,参数后有po,re,so和cf标记,这表明这个参数修改生效的条件:
po:
POWERON,重新上电,按压MMC上的软键“NCK复位”,参数生效
re:
RESET,复位,按压控制单元上的“RESET”键,参数生效
so:
IMMEDIATELY,立即,值输入以后,,参数立即生效
cf:
NEW_CONF,
新配置,按压MMC上的软键“设MD有效”,参数生效将景象文件拷贝到D:
的文件中,重启在启动选择菜单中(SINUMERIK和黑框)按下键选择黑框进入还原精灵,导入景象文件装入HMI。
840D系统装机步骤:
1:
PLC启动开关S4“2”=》PS灯亮。
2:
S4开关“3”并保持3秒直等到PS灯再次亮=》PS灯灭了又再亮。
3:
在3秒之内快速执行下列操作S4=>232=>PS灯先闪,后又亮,PF灯,(有时PF灯不亮)
4:
等PS和和PF灯亮了,S4—>0=》PS和PF灯灭PR灯亮
5:
NC启动开关S3为1开机状态下按复位按钮,七段显示“6”NC总清完成
6:
此时远程PLC的红灯亮,MCP面板灯闪。
7:
读入打包的调试文档。
下载PLC文件,检查硬件并检查远程PLC的设置端口是否和实际硬件相符,着重检查PLC模拟输入输出模块的输出口定义要为500否则和系统有冲突。
再将OB35的模拟输出更改和硬件定义一样。
关停电源。
报警文本的安装
1启动—》MMC—编辑器—MMC2—MBDDE.INI—进入找到userplc=这句话,再等号后加上路径f:
\dh\mb.dir\myplc。
大小写没关系,写完以后保存,拉闸重启。
2报警文本的加入方法
下面,介绍一些常用参数:
当电机从机床移去后,比如说V或B轴,这样就必须更改相应的参数,来避免报警。
MD30130设定值输出类型:
一般轴运行时应为1,在将电机移去后,应该为0
MD30240实际值传感器类型:
一般电机类型为1
绝对值编码器电机为4
如将电机移去,应改为模拟,为0
同时,应选择“驱动配置”,把光标打在“Active”的相应轴上,把“Yes”改为“No”→“保存”→“NCK复位”
绝对值编码器调整
1、参数设定
MD34200ENC_REFP_MODE(referencingmode)回参考点方式0=不回参考点
MD30240ENC_TYPE[0]=4绝对编码器类型1增量型
MD34100REFP_SET_POS[0].XXX参考点位置
MD34010REFP_CAM_DIR_IS_MINUS返回参考点方向
2、设MD34210ENC_REFP_STATE[n]设定为1,绝对值编码器为调整状态
3、设置参数生效,NCK复位(驱动上电,加使能)
4、选择到返回参考点方式REF
5、按下-或+方向键后,调整完毕MD34210为2
光栅尺带距离码的参数设定
MD34200ENC_REFP_MODE
(1)=3Distance_codedreferencemarks
MD34300ENC_REFP_MARKER_DIST
(1):
LS型尺设为20
LB型尺设为80
MD34310ENC_MARKER_INC
(1):
LS型尺设为0.02
LB型尺设为0.04
相关参数:
MD34320MD34060
伺服轴全闭环
伺服轴全闭环的参数
MD30200编码器的数量‘2’
MD30242编码器是独立的‘1’
MD31000线性尺:
直线轴为‘1’,旋转轴为‘0’
MD31010线性尺的分隔时段0.04
MD31040编码器直接安装在机床上‘1’
MD34000此轴带参考点凸轮‘0’
MD34060参考点脉冲的最大距离‘80’
MD34110轴回参考点的顺序‘-1’
MD34200回参考点的方式‘3’(距离码)
MD35000,MD35010为1可允许变档
光栅尺
直线尺:
LB型382C
MD34300参考点的标志距离‘80’
MD34100两个参考点中间间隔‘0.04’
圆光栅:
ROD780C或880C18000和36000线见上页。
LC型481要改驱动参数1030为cH(或置位3,2=1),数控平旋盘U轴1030要改为4H,MD30240要为4.
注意全闭环参数和半闭环参数之分
MD32450为反向间隙[0]为半闭环[1]为全闭环
MD32200[n]为伺服增益系数,不能低于0.7
MD32300为轴加速度 MD32100为移动方向
MD32930为滤波信号使能
MD32940为滤波,值不能太大,一般为0.02左右
MD35120为主轴最大速度
MD32000为最大轴速率
MD32020为点动轴速率
MD32110为反馈极性方向
MD34090为绝对位移零点设置回参考点开到零点硬限位,回5MM~10MM左右并记录显示值(在次前先将MD34090清零),再将纪录的值写入MD34090中。
看显示是否为零,否则重复上述步骤。
软件限位的设定
MD36100软件限位开关(负):
默认值为-100000000
MD36110软件限位开关(正):
默认值为100000000
只有在该伺服轴已回参考点的情况下才生效,可以限制机床行程,保护机床。
MD36100为负软限位
MD36110为正软限位这两点要在MD34090设置好后才能设置。
18230UsermemoryinSRAM1500~3000新旧卡之分
以下参数要注意:
MD30242编码器是独立的为1
MD30300旋转轴/主轴1为旋转轴0为直线轴
MD30310旋转轴/主轴的模数转化1为旋转轴0为直线轴
MD30320旋转轴和主轴的系数360度显示1旋转轴0为直线轴
MD31000直接测量系统(电子尺)0为线性尺
MD31010电子尺的分割点LB382C为0.04LCLS为0.02(10301034)也要改
MD31020每转的编码器线数全闭环时编码器线数1024TK69A的为2500
MD31030丝杠螺距
MD31040编码器直接安在机床上
MD31050负载变速箱分母
MD31060负载变速箱分子
MD32000最大轴速率
MD32100在电动模式下的快速移动
MD32020点动轴速率
MD32100移动方向(无控制方向)
MD32110实际值符号(控制方向)
MD32000伺服增益系数不要小于0.6
MD32260额定电机速度
MD32450反向间隙
MD32700螺距补偿使能0时要运行螺补程序1为使能
MD32710交叉补偿使能0时要运行交叉补偿程序1为使能
MD32920全闭环低速抖动滤波时间小于0.03
MD32930全闭环抖动滤波时间的使能1为使能
MD32940全闭环抖动滤波时间小于0.03
MD34000带参考点开关的轴1带开关0不带
MD340101为负方向回参考点0为正方向回参考点
MD34020回参考点速率300
MD34060参考点标记的最大位移80
MD34090参考点偏移
MD34100回参考点和位移方向符号不符1改为0
MD34200回参考点模式0不回参考点(半闭环),1为增量尺(零脉冲),3为绝对尺(位移编码参考标记)
MD34210状态绝对编码器,1使能编码器调整(绝对尺调整)2编码器已调整
MD34300距离编码缩放的参考标记位移80
MD34310在距离编码缩放的参考标记间的间隔0.04或0.02
MD34320在相反的线性测量系统光栅尺方向
MD35000指定主轴到机床轴主轴为1
MD35010齿轮变化可能,1(0时执行M代码)
MD35020主轴控制模式0/1为无/带位置控制的速度模式,2定位模式,3轴模式。
MD35110齿轮换挡的最大速度各级最大速度
MD35110齿轮换挡的最小速度各级最小速度
MD35200速度控制模式下的加速度半闭环的加速度10
MD35210位置控制模式下的加速度全闭环的加速度10
MD35300位置控制接通速度主轴定向速度M19速度5
MD35400摆动速度5
MD35410摆动速度的加速度5
MD36100第一负软件限位
MD36110第一正软件限位
MD36000MD36010MD36012MD36020为精停时的参数
MD38000为螺补开点数有半闭环和全闭环之分
1030光栅尺类型0H为增量型4H18H为绝对型
1034光栅尺栅格间隙类型40000为增量20000为玻璃
10000机床坐标轴名“X”“y”“z”“w”“sp”“v”“b”“u”
11200下次上电时载入的标准机床参数
11210只备份修改的机床参数
11300JOG模式下INC和REF
18114定义刀具切削沿方向
18230SRAM中的用户储存器15003000新旧卡之分
18342交叉补偿的开点数和41300有牵连
19100轴控制数一般镗床为10
19300为1时是4H补偿使能1位为螺补使能2位为交叉补偿使能
9020机床类型模拟选择1为镗床0为车床
9422预置开关1为使能尽量不开
840D系统装机步骤:
将景象文件拷贝到D:
的文件中,重启在启动选择菜单中(SINUMERIK和黑框)按下键选择黑框进入还原精灵,导入景象文件装入HMI。
1:
PLC启动开关S4“2”=》PS灯亮。
2:
S4开关“3”并保持3秒直等到PS灯再次亮=》PS灯灭了又再亮。
3:
在3秒之内快速执行下列操作S4=>232=>PS灯先闪,后又亮,PF灯,(有时PF灯不亮)
4:
等PS和和PF灯亮了,S4—>0=》PS和PF灯灭PR灯亮
5:
NC启动开关S3为1开机状态下按复位按钮,七段显示“6”NC总清完成
6:
此时远程PLC的红灯亮,MCP面板灯闪。
7:
读入打包的调试文档。
下载PLC文件,检查硬件并检查远程PLC的设置端口是否和实际硬件相符,着重检查PLC模拟输入输出模块的输出口定义要为500否则和系统有冲突。
再将OB35的模拟输出更改和硬件定义一样。
关停电源。
报警文本的安装
1启动—》MMC—编辑器—MMC2—MBDDE.INI—进入找到userplc=这句话,再等号后加上路径f:
\dh\mb.dir\myplc。
大小写没关系,写完以后保存,拉闸重启。
2报警文本的加入方法将报警文本复制到报警目录下即可。
取消轴:
启动—驱动配置—注销轴在将对应的MD30130、MD30110改为0即可。
添加轴:
启动—驱动配置—有效轴在将对应的MD30130、MD30110改为1即可。
MD30130Typeofsetpointoutput设定值输出的类型:
轴选择0无效,1有效
30200Numberofencoders编码器的数量:
1半闭环,2全闭环
设定绝对值编码器和带距离码光栅尺的零点
MD34090回参考点偏置:
即轴零偏,在该轴回参考点后,34090中写入数据会叠加在该轴的机床坐标系上。
如果为绝对值编码器,则上电后,零偏即被叠加。
MD31020每转的编码器脉冲:
默认值


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 伺服 闭环 闭环控制 切换 方法
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 转基因粮食的危害资料摘编Word下载.docx
转基因粮食的危害资料摘编Word下载.docx
-
高中英语词组大全Word文档下载推荐.docx
-
卫计局年工作总结及新年工作计划Word格式.docx
-
贵州省煤矿安全管理人员安全资格证A考试概况Word格式.docx
-
系统集成项目招标文件Word文件下载.docx
-
电子商务考试题总汇打印版打印打印Word下载.docx
-
选调生考试备考言语理解与表达真题Word文档格式.docx
-
高考物理实验题专练 专练15Word文档格式.docx
-
加装奥迪A4L蓝牙电话功能Word文档下载推荐.docx
-
学年下学期好教育高三月考仿真卷A卷 语文 学生版后附详解Word文档下载推荐.docx
-
净化生产车间工程一般施工技术施工方案Word文档格式.docx
-
内蒙古呼和浩特市第六中学学年高一政治下学期期末考试试题Word下载.docx
-
证券行业客户经理电话营销技巧与实例Word文档下载推荐.docx
-
叶芝 苇间风文档格式.docx
-
最新中美贸易摩擦的原因及解决对策1论文Word文件下载.docx
-
意义的近义词Word格式文档下载.docx
-
上海市中考英语试题S.docx
-
专题12观点论证类设问.docx
-
附加安心重疾条款.docx
-
设计变更管理办法修改意见稿FINAL汇编.docx
-
毕业赠言毕业致词精选多篇.docx
-
银行新员工代表发言稿精选多篇.docx
-
北京市朝阳区届高三第一学期期末语文试题Word版含答案.docx
-
HL线切割使用说明书模板.docx
-
车工实训周记.docx
-
USBHID键盘扫描码.docx
-
Apmpoqu4调研报告.docx
-
最熟悉的陌生人作文八篇.docx
-
被动语态综合讲解.docx
-
部编版语文七上第五单元16猫同步练习试题.docx
-
软件体系结构作业2.docx
-
钢管管道安装焊接施工工艺.docx
-
大一知识学习方面的规划大学生职业规划之学习规划简易版.docx
-
起重机械安全管理制度.docx
-
驱动电机复习题带答 1.docx
-
施工方案编制大纲讨论稿电气.docx
-
广西中考数学押题卷及答案.docx
 RNAi慢病毒稳转细胞和原核表达简介.ppt
RNAi慢病毒稳转细胞和原核表达简介.ppt
-
塑胶色粉项目可行性研究报告.docx
-
技术工程师工作总结.docx
-
实习生工作自我鉴定7篇.docx
-
犯罪心理学试题.docx
-
小升初英语冲刺专项训练4 情景对话doc.docx
-
山东省滕州市第五中学届高三第二次月考历史试题 Word版含答案.docx
-
全国自学考试概率论与数理统计(二)历年真题及答案.doc
-
全国硕士研究生入学考试英语一试题及参考答案.docx
-
全国职业院校技能大赛高职组“工业机器人技术应用”赛项规程.doc
-
全国自考历年试卷电子商务概论试题.doc
-
传真机使用及维护.ppt
-
汽车租赁报价表.docx
-
城市公共服务设施规划规范.docx
