 自动控制原理胡寿松第5版课后习题及答案完整.docx
自动控制原理胡寿松第5版课后习题及答案完整.docx
- 文档编号:9490424
- 上传时间:2023-02-04
- 格式:DOCX
- 页数:274
- 大小:565.44KB
自动控制原理胡寿松第5版课后习题及答案完整.docx
《自动控制原理胡寿松第5版课后习题及答案完整.docx》由会员分享,可在线阅读,更多相关《自动控制原理胡寿松第5版课后习题及答案完整.docx(274页珍藏版)》请在冰豆网上搜索。
自动控制原理胡寿松第5版课后习题及答案完整
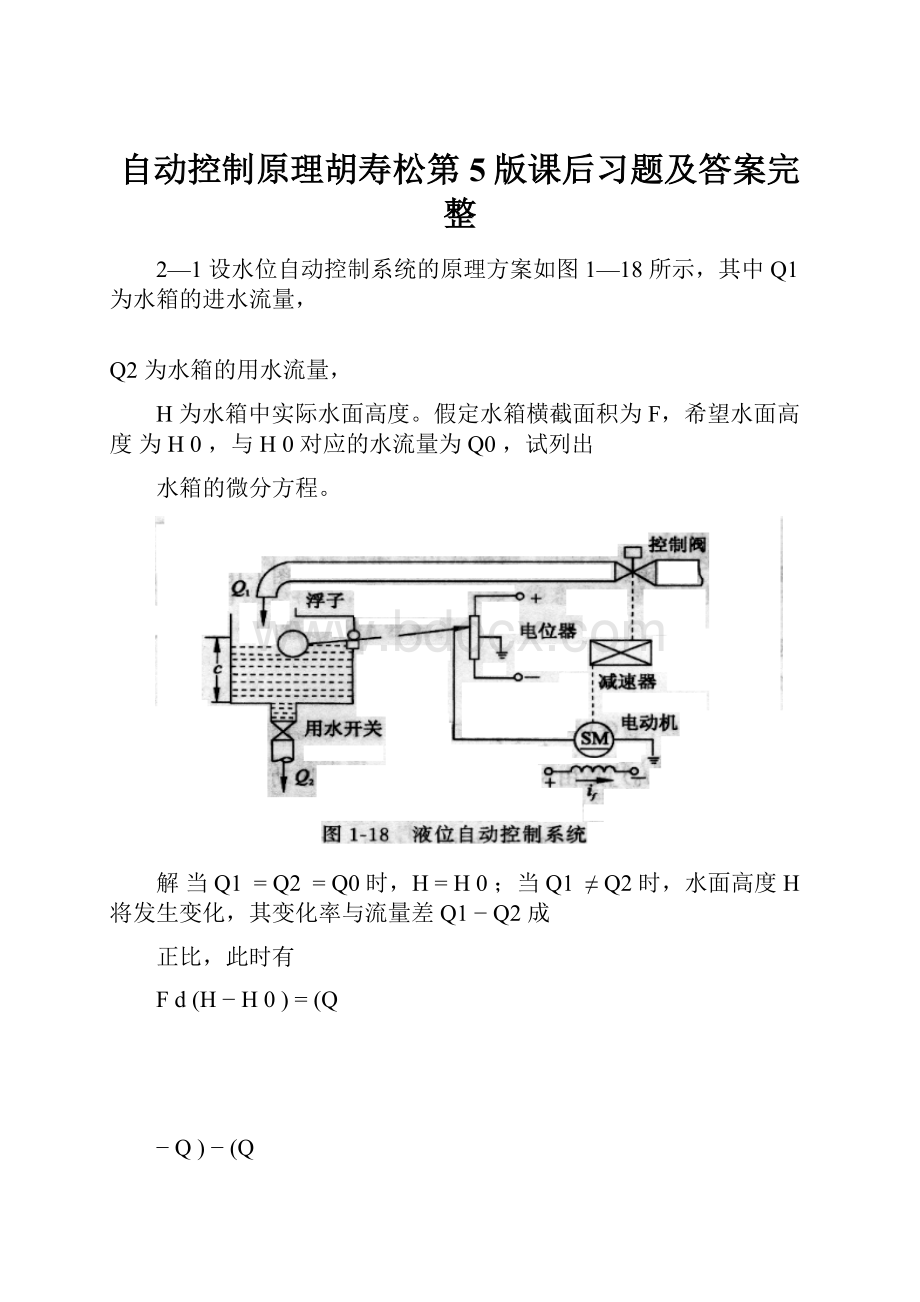
2—1设水位自动控制系统的原理方案如图1—18所示,其中Q1为水箱的进水流量,
Q2为水箱的用水流量,
H为水箱中实际水面高度。
假定水箱横截面积为F,希望水面高度为H0,与H0对应的水流量为Q0,试列出
水箱的微分方程。
解当Q1=Q2=Q0时,H=H0;当Q1≠Q2时,水面高度H将发生变化,其变化率与流量差Q1−Q2成
正比,此时有
Fd(H−H0)=(Q
−Q)−(Q
−Q)
dt1020
于是得水箱的微分方程为
FdH=Q−Q
dt12
2—2设机械系统如图2—57所示,其中xi为输入位移,x0为输出位移。
试分别列写各系统的微分方程式
及传递函数。
图2—57机械系统
解①图2—57(a):
由牛顿第二运动定律,在不计重力时,可得
f1(x&i−x&0)−f2x&0=m&x&0
整理得
2
mdx0+(f
+f)dx0=f
dxi
dt2
12dt
1dt
将上式进行拉氏变换,并注意到运动由静止开始,即初始条件全部为零,可得
1
[ms2+(f
+f2
)s]X
0(s)=
f1sXi
(s)
于是传递函数为
X0(s)=
Xi(s)
f1
ms+f1+f2
②图2—57(b):
其上半部弹簧与阻尼器之间,取辅助点A,并设A点位移为x,方向朝下;而在其下半部工。
引出点处取为辅助点B。
则由弹簧力与阻尼力平衡的原则,从A和B两点可以分别列出如下原始方程:
K1(xi−x)=
f(x&−x&0)
K2x0=
f(x&−x&0)
消去中间变量x,可得系统微分方程
f(K
+K)dx0+KKx
=Kf
dxi
12dt
120
1dt
对上式取拉氏变换,并计及初始条件为零,得系统传递函数为
X0(s)=
Xi(s)
fK1s
f(K1+K2)s+K1K2
③图2—57(c):
以x0的引出点作为辅助点,根据力的平衡原则,可列出如下原始方程:
K1(xi−x)+f(x&i−x&0)=K2x0
移项整理得系统微分方程
fdx0+(K
dt1
+K2
)x0=
fdxi
dt
+K1xi
对上式进行拉氏变换,并注意到运动由静止开始,即
xi(0)=x0(0)=0
则系统传递函数为
X0(s)=
Xi(s)
fs+K1
fs+(K1+K2)
2-3试证明图2-58(a)的电网络与(b)的机械系统有相同的数学模型。
图2-58电网络与机械系统
1
R1
1CsRR
解:
(a):
利用运算阻抗法得:
Z
=R//
=1=1=1
11Cs
RCs+
Ts+
1R1
+1
C1s
11111
Z2=R2
+1
C2s
=1
C2s
(R2C2
s+1)=
1
C2s
(T2s+1)
U(s)Z
1
(T2s+1)
Cs
(Ts+1)(Ts+1)
所以:
0=2=2=12
Ui(s)
Z1+Z2
R1+
T1s+1
1
C2s
(T2s+1)
R1C2s+(T1s+1)(T2s+1)
(b)以K1和f1之间取辅助点A,并设A点位移为x,方向朝下;根据力的平衡原则,可列出如下原始方程:
K2(xi−x0)+f2(x&i−x&0)=
f1(x&0−x&)
(1)
K1x=
f1(x&0−x&)
(2)
所以K2(xi−x0)+f2(x&i−x&0)=K1x
对(3)式两边取微分得
K2(x&i−x&0)+f2(&x&i−&x&0)=K1x&
将(4)式代入
(1)式中得
(3)
(4)
K1K2(xi−x0)+K1f2(x&i−x&0)=K1f1x&0−f1K2(x&i−x&0)−f1f2(&x&i−&x&0)
整理上式得
f1f2&x&0+f1K2x&0+K1f1x&0+K1f2x&0+K1K2x0
=f1f2&x&i+f1K2x&i+K1f2x&i+K1K2xi
对上式去拉氏变换得
1
2
[ff
1
1
2
s2+(fK
2
+K1f1
+K1
0
f2)s+K1K2
]X(s)
1
2
=[f
fs2+(fK
+K1
f2)s+K1K2]X
i
(s)
所以:
X0(s)=
2
2
f1f2s
+(f1K2+K1f2)s+K1K2
f1f2
K1K2
=
s2+(f1
K
1
+f2)s+1
K2
Xi(s)
f1f2s
+(f1K2+K1f1+K1f2)s+K1K2
f1f2
K1K2
s2+
(f1
K
1
+f2)s+1+f1
K2K2
(f1
K
=1
s+1)(f2
K2
s+1)
(f1
K
1
s+1)(f2
K2
s+1)+f1
K2
所以图2-58(a)的电网络与(b)的机械系统有相同的数学模型。
2—4试分别列写图2-59中个无源网络的微分方程式。
解:
(a):
列写电压平衡方程:
duCuC
ui−u0=uC
iC=C
dt
duC
uC
iR1=
R1
R
1
d(ui−u0)
ui−u0
u0=(iC+iR1)R2=C
+R2=C
+R2
整理得:
dt
R1dt
R1
CRdu0+CR2
0
+1u
=CR
dui
+CR2u
2dt
R1
2dti
(b):
列写电压平衡方程:
duC1
ui−u0=uC1
(1)
iC1=C1
dt
(2)
iC2=
uC1+iC1RR
+iC1=
uC1
R
+2i
C1=C2
duC2
dt
=C2
d(u0−iC1R)
dt
(3)
即:
uC1
R
+2iC1=C2
d(u0−iC1R)
dt
2
(4)
将
(1)
(2)代入(4)得:
ui−u0+2C
d(ui−u0)=C
du0−CC
RduC1
R1dt
2dt
12dt2
uudu
dudu
d2u
d2u
即:
i−0+2C
i−2C
0=C
0−CC
Ri+CC
R0
RR
整理得:
1dt
1dt
2dt
12dt2
12dt2
2
CCRdu0C
Cdu0u0
CCRduiui
Cdui
12dt2
+(2+2
1)dt+R=12
2
dt2
++2
R
1dt
2-5设初始条件均为零,试用拉氏变换法求解下列微分方程式,并概略绘制x(t)曲线,指出各方程式的模态。
(1)
2x&(t)+x(t)=t;
解:
对上式两边去拉氏变换得:
(2s+1)X(s)=1/s2→X(s)=
1=1
s2(2s+1)s2
−1+
s
4
2s+1
运动模态e−0.5t
所以:
x(t)=t−2(1−e
−1t
2)
(2)&x&(t)+x&(t)+x(t)=™(t)。
解:
对上式两边去拉氏变换得:
(s2+s+1)X(s)=1→
X(s)=
1
(s2+s+1)
=1
(s+1/2)2+3/4
运动模态e
−t/2
t
3
sin
2
所以:
x(t)=
2e−t/2
3
t
3
sin
2
(3)&x&(t)+2x&(t)+x(t)=1(t)。
解:
对上式两边去拉氏变换得:
(s2+2s+1)X(s)=1→X(s)=
s
1=
s(s2+2s+1)
1
s(s+1)2
=1−
s
1+
s+1
1
(s+1)2
运动模态e−t(1+t)
所以:
x(t)=1−e−t−te−t
=1−e−t(1+t)
2-6在液压系统管道中,设通过阀门的流量满足如下流量方程:
Q=KP
式中K为比例常数,P为阀门前后的压差。
若流量Q与压差P在其平衡点(Q0,P0)附近作微小变化,试导出线性化
方程。
解:
设正常工作点为A,这时Q0=KP0
在该点附近用泰勒级数展开近似为:
y=f(x
)+df(x)
(x−x)
0dx
0
x0
即Q−Q0=K1(P−P0)
dQ
其中K1=
dP
=1K1
00
2
P=PP
2-7设弹簧特性由下式描述:
F=12.65y1.1
其中,是弹簧力;是变形位移。
若弹簧在变形位移附近作微小变化,试推导的线性化方程。
解:
设正常工作点为A,这时F=12.65y1.1
00
在该点附近用泰勒级数展开近似为:
y=f(x
)+df(x)
(x−x)
0dx
0
x0
即F−F0=K1(y−y0)
dF
其中
0.1
0.1
K1=
=12.65⋅1.1y0
=13.915⋅1.1y0
dy
y=y0
2-8设晶闸管三相桥式全控整流电路的输入量为控制角,输出量为空载整流电压,它们之间的关系为:
0
ed=Ed
cos〈
式中是整流电压的理想空载值,试推导其线性化方程式。
解:
设正常工作点为A,这时Ed
=Ed0cos〈0
在该点附近用泰勒级数展开近似为:
y=f(x
)+df(x)
(x−x)
0dx
0
x0
0
即ed−Ed
cos〈0=Ks(〈−〈0)
s
其中K=ded
d〈
=−Ed0sin〈0
〈=〈
2-9若某系统在阶跃输入r(t)=1(t)时,零初始条件下的输出响应c(t)=1−e−2t+e−t,试求系统的传递函数和脉冲响应。
解:
对输出响应取拉氏变换的:
C(s)=1−1
+1=
s2+4s+2
因为:
C(s)=√(s)R(s)=1√(s)
ss+2
s+1
s(s+1)(s+2)s
所以系统的传递函数为:
√(s)=
s2+4s+2(s+1)(s+2)
=1+
s
(s+1)(s+2)
=1−
1+
s+1
2
s+2
系统的脉冲响应为:
g(t)=™(t)−e−t+e−2t
2-10设系统传递函数为
C(s)
=
R(s)
2
s2+3s+2
且初始条件c(0)=-1,c&(0)=0。
试求阶跃输入r(t)=1(t)时,系统的输出响应c(t)。
解:
由系统的传递函数得:
2
dc(t)+3dc(t)+2c(t)=2r(t)
(1)
dt2dt
对式
(1)取拉氏变换得:
s2C(s)−sc(0)−c&(0)+3sC(s)−3c(0)+2C(s)=2R(s)
将初始条件代入
(2)式得
(s2+3s+2)C(s)+s+3=21
s
(2)
即:
C(s)=
2−s2−3s
=
s(s2+3s+2)
2−2s+6
ss2+3s+2
=1−
s
4+
s+1
2
s+2
所以:
c(t)=2−4e−t+2e−2t
2-11在图2-60中,已知和两方框相对应的微分方程分别是
6dc(t)+10c(t)=20e(t)
dt
20db(t)+5b(t)=10c(t)
dt
且初始条件均为零,试求传递函数C(s)/R(s)及E(s)/R(s)
解:
系统结构图及微分方程得:
G(s)=
20
6s+10
H(s)=
10
20s+5
1020
E(s)1010
C(s)=
10G(s)
=6s+10
R(s)
==
1+G(s)H(s)
2010
R(s)
1+G(s)H(s)1+2010
1+
6s+1020s+5
6s+1020s+5
10(20s+5)(6s+10)
1200s2+1500s+500
0
=200(20s+5)
==200(20s+5)
==
(6s+10)(20s+5)+200
120s2+230s+250
(6s+10)(20s+5)+200
120s2+230s+250
2-12求图2-61所示有源网络的传递函数
1
解:
(a)Z0=R0//=
Cs
R1
C0s
1
=R0
Ts+1
T0=R0C0
R
00+
0
C0s
U0(s)=−R1
=−R1(Ts+1)
R
Ui(s)Z00
(b)Z0
=R0
0
0
//1=
Cs
R1
C0s
1
=R0
Ts+1
T0=R0C0
R
00+
0
C0s
11
Z=R+1
=T1s+1
T=RC
C1s
C1s
111
U0(s)=−Z1=−
1(Ts+1)(Ts+1)
U(s)Z
RCs10
i001
Z12
=R1
//(R2
+1
C2s
)=R1
//T2s+1
C2s
(c)
1
=
RT2s+1
C2s
=R1(T2s+1)
T2=R2C2
1
R+T2s+1
C2s
T2s+R1+1
U0(s)=−Z12
=−R1
T2s+1
Ui(s)R0
R0T2s+R1+1
2-13由运算放大器组成的控制系统模拟电路如图2-62所示,试求闭环传递函数Uc(s)/Ur(s)。
图2-62控制系统模拟电路
解:
U1(s)
=−Z1
(1)
U2(s)=−Z2
(2)
U0(s)=−R2(3)
U0(s)+Ui(s)R0
U1(s)R0
U2(s)R0
式
(1)
(2)(3)左右两边分别相乘得
U0(s)
U0(s)+Ui(s)
=−Z1Z2
R0R0
R2即
R0
R
3
U0(s)+Ui(s)=−0
1+Ui(s)=−0
U0(s)
Z1Z2R2
U0(s)
Z1Z2R2
R
所以:
Ui(s)=−0−1
U0(s)
Z1Z2R2
R
3
R
+
0
R11
R
2
2
U0(s)=−1
=−Z1Z2R2
=−T1s+1C2s
U(s)R3
R3+ZZRR1
3
i0+1
Z1Z2R2
3
=−R1R2
0122
31RT1s+1C2s
(T1s+1)C2sR0
+R1R2
2-14试参照例2-2给出的电枢控制直流电动机的三组微分方程式,画出直流电动机的结构图,并由结构图等效变换求出电动机的传递函数Ωm(s)/Ua(s)和Ωm(s)/Mc(s)
解:
由公式(2-2)、(2-3)、(2-4)取拉氏变换
Ua(s)−Ea(s)=I
Ls+Ra
(s)
Ea(s)=CeΩm
(s)
aa
CmIa(s)=Mm(s)
m
Mm(s)−Mc(s)=Ω
(s)
Jms+fm
得到系统结构图如下:
Mc
Ua(s)
1Ia(s)CmMm
1Ωm(s)
-Las+RaJms+fm
Ce
Ωm(s)=
Cm
Las+Ra
1
Jms+fm=Cm
Ua(s)
1+CeCm
Las+Ra
1
Jms+fm
(Las+Ra)(Jms+fm)+CeCm
Ωm(s)=
Mc(s)1+
1
Jms+fm
CeCm1
=Las+Ra
(Las+Ra)(Jms+fm)+CeCm
Las+Ra
Jms+fm
2-15某位置随动系统原理方块图如图2-63所示。
已知电位器最大工作角度⎝
max
=330o,功率放大级放大系数为K3,要
求:
(1)分别求出电位器传递系数K0、第一级和第二级放大器的比例系数K1和K2;
(2)画出系统结构图;
(3)简化结构图,求系统传递函数⎝0(s)/⎝i(s)。
图2-63位置随动系统原理图
解:
(1)K=15V
01650
K=30=3
110
K=20=2
210
(2)⎝e(s)=⎝i(s)−⎝0(s)
Us(s)=K0⎝e(s)
Ua(s)=K1K2KsUs(s)
Ua(s)=RaIa(s)+LasIa(s)+Eb(s)
Mm(s)=CmIa(s)
00mc
Js2⎝(s)+fs⎝(s)=M(s)−M(s)
系统结构图如下:
Eb(s)=Kb⎝0(s)
m
Mc
θiθe
-
θ0
0KKK
KUs12sUa
-Eb
1
Las+Ra
M-1θ0
Js2+fs
C
m


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 自动控制 原理 胡寿松第 课后 习题 答案 完整
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《Java程序设计》考试大纲及样题试行.docx
《Java程序设计》考试大纲及样题试行.docx
-
《工业企业管理》自学任务书.docx
-
《短歌行》原文翻译及赏析.docx
-
《跳水》教案3.docx
-
《基于MATLAB的信号与系统实验指导》编程练习.docx
-
《你是最棒的》教学设计.docx
-
《选修4化学反应原理》知识点总结整理超全.docx
-
2环境应急监测试题资料.docx
-
《自动化仪表工程施工及验收规范》GB50093仪表安装检验批.docx
-
09年法律硕士民法预热辅导第2102讲完整篇doc.docx
-
6阅读能力阅读方法指什么.docx
-
《豆蔻镇的居民和强盗》读后感.docx
-
CMYK色值参考.docx
-
3121护理查对制度.docx
-
《草莓》课堂教学课件5篇.docx
-
CCNA完整知识点.docx
-
《合理安排时间》说课稿.docx
-
18我的伯父鲁迅先生.docx
-
3dmax授课计划doc.docx
-
《中共中央国务院关于加快推进生态文明建设的意见》.docx
-
《永生的眼睛》练习题附答案.docx
-
flow3d官方培训教程中的实例中文说明.docx
-
《宪法》《监察法》应知应会100题含答案.docx
-
EMS基础知识综合练习复习资料.docx
-
100以内退位减法500道带竖式空间可直接打印.docx
-
207声屏障施工组织设计.docx
-
30个科学小常识教学提纲.docx
-
JGJ59建筑施工安全检查标准评分表全套.docx
-
12幼儿园保育员培训活动记录表.docx
-
minecraft匠魂教程.docx
-
c语言课程设计学生成绩管理系统.docx
-
0503新闻传播学基本要求.docx
-
中科院生物化学与分子生物学历年考研真题文档格式.docx
-
银行年终总结范文银行工作总结Word文档格式.docx
-
十多个基层岗位面试情景模拟题库Word文件下载.docx
-
整理小学经典通读诗润童心校本教材上册文档格式.docx
-
浙江省嘉兴市中考科学物理部分试题解析版文档格式.docx
-
中频炉废气处理方案Word下载.docx
-
易燃易爆化学物品运输防火教案资料Word文档下载推荐.docx
-
中石油职称英语考试大纲模拟试题Word文档格式.docx
-
医疗质量持续改进实施方案Word文档格式.docx
-
10kV配电装置施工技术措施Word文档下载推荐.docx
-
新基本法竞赛考试题Word文件下载.docx
-
帝璟湾小区附属配套工程招标文件Word文件下载.docx
-
影视艺术概论复习知识点docWord格式文档下载.docx
-
医学生职业生涯规划书文档格式.docx
-
0917《高等数学》春Word下载.docx
-
重庆市涪陵区事业单位考试《医学专业能力测验》真题及答案文档格式.docx
-
活性炭技术资料Word格式文档下载.docx
-
一句话爱情伤感语录.docx
-
市政资料检验批应做表格文档格式.docx
