 伺服驱动器参数设置步骤.docx
伺服驱动器参数设置步骤.docx
- 文档编号:9408086
- 上传时间:2023-02-04
- 格式:DOCX
- 页数:21
- 大小:264.75KB
伺服驱动器参数设置步骤.docx
《伺服驱动器参数设置步骤.docx》由会员分享,可在线阅读,更多相关《伺服驱动器参数设置步骤.docx(21页珍藏版)》请在冰豆网上搜索。
伺服驱动器参数设置步骤
伺服驱动器参数
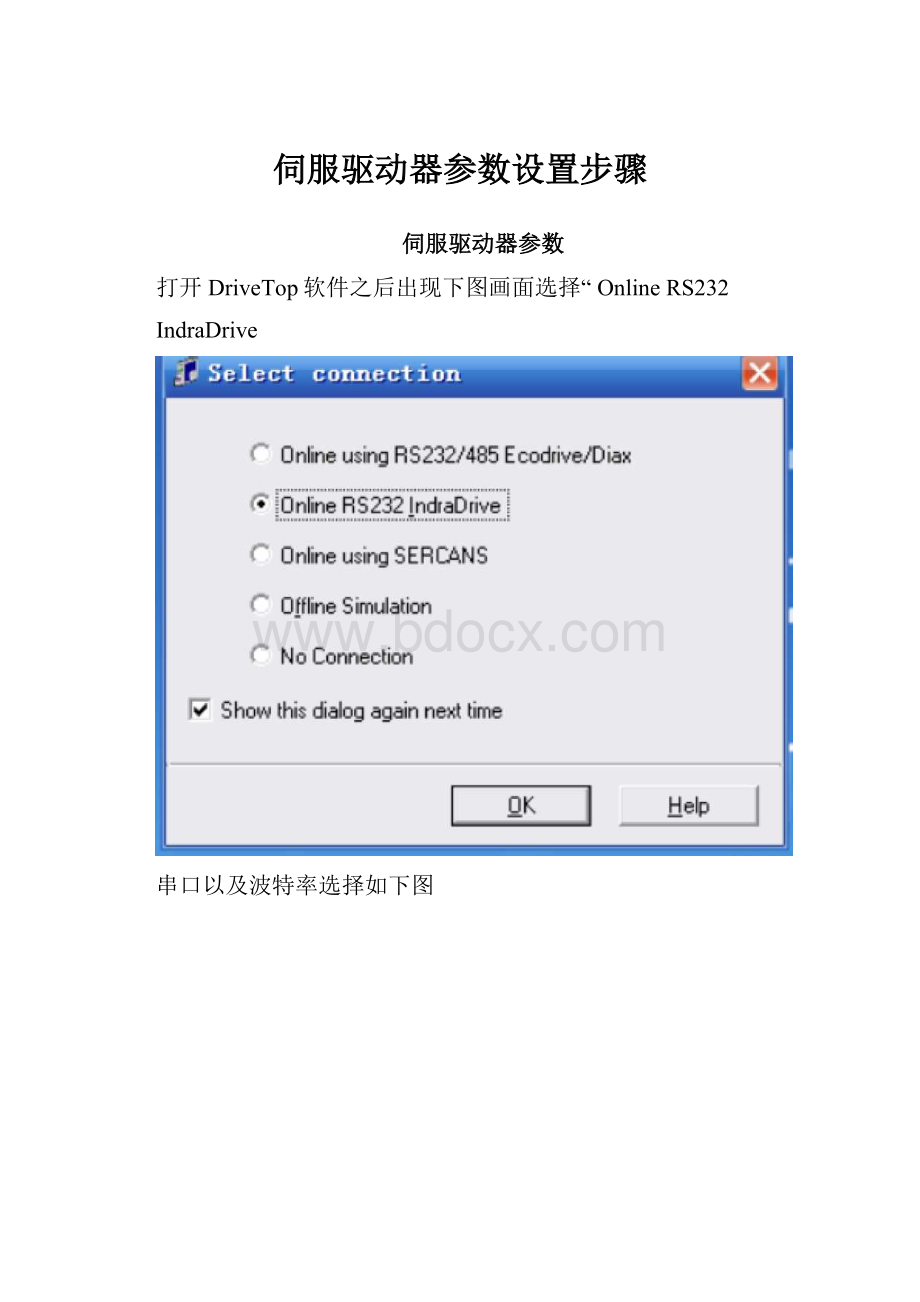
打开DriveTop软件之后出现下图画面选择“OnlineRS232
IndraDrive
串口以及波特率选择如下图
参数设定首先进入“Operatingmodeselecting”菜单“Primaryoperationmode”一栏选择“velocitycontrol”最后点击Next就可以进入以下参数设置画面
Statesignalstatusword
Sourceparameter
Bit-No.
012345678B-B-boB-B-B-B-B-B-
roooKrooI°ero
;・signalcontrolword-Drive5.Anvendungsart Statesignalcontrolword Targetparameter Bit-No. Jdp-zlplvvpl-zlp-"o八■2■2■八■八■八■2■ del del f? P&Tersupply-Drive5,Anvendungsart MAD160-C-0150-SA-S2-K-G-0-35-N1发动机型号 Temperaturesensor: KTY84 f? Gear,Mechanical-Drive5$Anvendun^sart QUputrevoldtionscfloadgearn2[T Datawithinspectto苗'MotorsFiaft广Load Positionda(air> 厂absoluteforma*忖moduloformal 函而5Deg Mode 厂positivedhection「negativedirectiont*shoitestpath 旦elp 2500Rpm需要设置 Accelerationfactor: 1需要设置 Ramp2pitch: 150rad/s与Decelerationramp2: 150rad/s需要设置 Drivecontroledpositioning/relativedrivecontr.interpolation,enc.1zlegless Positioningvelocity Positioningacceleration Positioningdeceleration |10.0000 Rpm Positioningjerk lo.ooo 1000.000 (ad/$ FeedrateOverride 100.00 1000.000 rad/s Velocitythresholdpositioning 20.0000 rad/$^ N Rpm inibalizationreference 厂lasteffectivetargetposition Po$.commandvalue Deg |0.0000 tPositioning〜interpreterrL— interpreter Positioning Stop Jogging QEnable (0Accept r r♦ C・ Gabsolutetargetposition「relativetravelrange 「ReferenceispositionfeedbackvalueeReferenceisactivetargetposition Acceptnewtravelrange ISequentialblockwithstop二| Pgcommandvalue Targetposition|0.0000 Statuspositioninggeneralor 厂Targetpotionattained(S-0-0342)rIN.TARGETPOSITIONrizp 厂Interpolatorhasstopped Actualvalues Positionmotor Positionexternal 239.2576Deg I00000喝 Next: > LHP| Driveliaitations^positionliaits-Drive5.Anvendungsart Positionlimitcontrol 「active Positsfeedbackvalue( PositiveportionOmitvalue Negatepositionlimitvalue Gnotactive Monitocrgthetravelrangelimitswitch THptravelrangeIrmif时chz* Oacbve Gnotactive rN/e ReactionwhenezceecHptravellimit 〉|Exit|旦elp I? Aziscontro1 Limit: values |0.000 iLimitvaluer|K»OOlOOO' 10.0000 110107 _0.0|0.D 厂Firn? in^rpolaliiQn [25000000 CoriTolloopmode Standard供-Ft旳500u&/V-Reg: 250u$) Selectedpar曰meter NameAccderalionfeedfcMwaidgain R»Oe0.0000to[214740L3S47mMm/frad/s? ) p^nbrolIqqpmonitofing AutomtaliccohItoIloop企etti闻 CJosftI Limitvalues: 10000和2500与PI: 46和6需设置 JpControlloop,Controlloopmonitoring Velocitycontrolloopmonitoring C*active 「notactive Positwriloopmonitoring Maamummodeldeviation Monitoringwindow 1D041 DegSettozero\\ 1100.0000 Deg Encodermonitomg Errorthreshold 1000' 「Travelrangeinput GLimitinput 4travelrangemustbedefinedfortheautomaticcontrolloopsettinginwhich: heaxismaymovefreely.Anupperandalowerlimitpositionmustbe$etProceedasfollowsforthesetting: A 1.Pressthe'Lowerposition'button.Thevalueforthelowerpositionbegins: obiinkandthe'Teach-in'buttonappears. 2.Movethea»stotheoneendofthetravelingrange(usethejogfunctionorentera$etvalue)Youcan$eetheexactpositionoftheaxisfromthe阳lueshowedbythe'Currentposition*. 3.Pressthe^each-ri1button,andthevalueforthecurrentpositioni$enteredastheoneforthelowerposition. 4.Pressthe'Upperposition*button.Thevaluefortheupperpositionbeginsoblinkandthe*Teach-in'buttonappears. 5.MovetheaxisluIhDulhaendufUieU ;PrawIhpi*Tftarh-r»'hirf^nnAndfhpvalijftforthftnjrrftrrfnn^rtmnia V < > Delveli&itations: torque/forceandcurrentlisits Effectivetorque/forcecommandvalue 「orque-geneiratingcurrent,commandvalue TwqueAorcellimits Cuuentlimits Activepeakcurent149.999 Mawnum]possiblecontinuouscurrent94.999 Aeff Aefl Torque/forcelimitvaluepositive: 400% Torque/forcelimitvaluenegative: -400% Torque/forcepeaklimit: 400% Bipolartorque/forcelimitvalue: 400% 需设置 Tempeiaturmodelmotor Motorpeakctmrsnl: 152.EOO AeFI Temperaturmodelamplifier Amplifiefps^kcurienl: Mutorcur»nlalelardstil 67.000 Ampltfieinaminalojirent AmplVi«tlamperaturft TherniAldrivelaad □wrlo^dw-arning Toigufr/force limit lotorcontrol *■Min■* Id-匚omEand FIukloop Stalleurrenllimil Min■* ActivepBakcunent 149.999 Maximunpossiblecontinuouscurrent94339 Iq-匚□mmand Currenrtcontr. Aeff Aeff Het IderitNo name |value HQ「匚 CurnniIqodorQawtionaloain1 2.39 S-0-0107 Currentloopintegralactiontime1 1.5 S-D-0380 DCbusvoltage 561.6 P-0-0001 SnitchrigfrequencyMthepQvvetOi/putstage 4000 P4T0M3 Torque-generatingcurrent,actualvalue 0.207 P-0-0044 FluX'genefatingcurrent,actualvalue 191868 P-0-D045 Control^ordclcurrentcoritnoller 0000.0000.00010... P-0-0D4G Statuswordofcurrentcontroller 0000.0000.00010... P0-0526 Fluxcontrolloopproportioralgain e.3i P-0-0529 Scaingofstallcurrentimit 100 p.n.n^in fin尸gBig 1RO mVHA.A."""怎1 Sorting 金idenlnumbers 厂names Search Close drivehalt-Drive輻,Anv^ndun^sart Drivehaltacknowledge艸ith Staixltetil训indo理|MPJOO Lookindialog"Staursmessages" Rpm Next> 1 1. H* DriveHaltaccelerationbipolar: 800rad/s Standstillwindow: 5Rpm £2E-stopfunction-Drive5.Anvendungsart EvaluationoftheE-Stop$ign^l 「...active Q...notactive Q.ErrorF40"Theerrsmustbereset. iill. 「A^nrnpE8Q34Drivemovable^geinafterrfand^ -ReatJtfpn 「<elppftycommentvefweequ曲zero Q*dpfredby礙ethodafi: b«Jpo$sibfedeceferationl <Back| Next: > Exit| Help| 厂MessageJnposition" Deg 厂Message"actualvelocity Velocitythresholdnx Positionwindow Lookinoperationmodesv Postioncontrol1'homing" |0.1000 Mth |1000.0000 Rpm FMessage"Standstill" 厂Message"Actualtorque/foccevalue>thresholdMdx* Standstillwindow |5.0000 Rpm TorquethreshodTx|100.0 厂Message"actualvelocity=velocitycommand" 厂Message'Tactualpowervalue! >=thresholdPxM Velocitywindow |10.0000 Rpm PowerthresholdPx|0 Watt r厂Message"velocitycommand>Smit" 厂Message"Lagerror coaree" B^olarvelocitylimitvalue Positioningwindowcoarse10.5000 Deg 12500.0000 Rpm <更CR1|理以: >|Exit|Help Probeevaluadon 「Measurementstarted AMeasurementterminated 厂Probe1actuated Probevalue1pos. 0.0000 •• Probevalue1neg. o.oooof Probe1positivelatched Differ©nee 0.0000 •• Probe1negativelatched Markerfailurecounter 0 HelpI Resolutionofencoderemulat: 2048Counts/Rev Makerpulseoffset: 0CountsMakerpulsedistance: 2048Counts Measuringencoderinterface Noencoderinterface Assignmentmeasuringencodersoptionalslot|Onboard(X8)~^] ■Errcodertype 厂drectior? invertedProtaryencoder 7U Resolr-rtion|0 -Adfjrfmenrt Modulofact了measuringencoder Multiplication IVernalpos.dataformat F? ! ertimecoolant Potionfeedbackvalue nff^pfp^ifirrzfepffharkvalrip Absoluteencoderrange Incr Incr Rev Absoluteencoderevaluationndposabler厂Measuringencoderhwprf Setabsc/uterneasunngofmeasuringencoderI £9Averagevaluefilterfordisplay-Drive5.Anvendungsart Filter1 SignalF Timeconstant卜m$ Filter2 jjJPositionsvitchpoint1-Dcive5jAnvendunfsart ■—C4QZHPri+r4L 注: 此软件为翻页就会保存修改数据,未提到的参数为默认制值


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 伺服 驱动器 参数设置 步骤
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 1212中级汽车维修工考试试题三.docx
1212中级汽车维修工考试试题三.docx
-
333教育综合.docx
-
204届毕业生基础知识考试试题 混凝土结构设计 试题.docx
-
100以内加减运算练习题.docx
-
101软件开发工程师JAVA初级考试样卷课件word版本.docx
-
CNN代码理解.docx
-
CPA审计第4章审计抽样下载版讲解.docx
-
hr培训管理系统.docx
-
318安通科科长岗位责任制.docx
-
2044施工现场环境污染的防治措施.docx
-
12371党务平台操作手册.docx
-
Catia百格线生成宏复习过程.docx
-
725kV及以上电压等级支柱瓷绝缘子运行规范.docx
-
1144甑底链板机说明书.docx
-
100个著名初等数学问题.docx
-
201X中学寒假工作计划范文.docx
-
111 生物的特征 练习 人教版七年级上册生物.docx
-
110KV变电所设计变压器翻译.docx
-
9920第二学期学校工作总结.docx
-
0911二级技能解答.docx
-
33415设计说明书正文.docx
-
311教育学基础综合大纲.docx
-
201浙江普通高校招生选考科目考试地理试题和答案解析.docx
-
C语言程序的设计实验实验指导书及答案.docx
-
272相似三角形的性质和判定.docx
-
ACCAHA不稳定型心绞痛和非ST段抬高心肌梗死治疗指南修订版摘要.docx
-
baosteel标准对照 外标含量.docx
-
M1模拟练习题.docx
-
ARM体系课程设计实验报告.docx
-
Android面试题整理.docx
-
gaoer.docx
-
CPⅢ测设方案.docx
-
好母亲先进事迹材料.docx
-
葫芦岛市版二级建造师《建设工程法规及相关知识》试题 含答案.docx
-
沪科版物理八年第二章《运动的世界》word全章教案.docx
-
环境生物学.docx
-
机械制造工艺学重要文件.docx
-
基层工作学习体验月个人工作总结多篇范本.docx
-
激光打印机维护保养完全手册精编版.docx
-
记者心得体会精选多篇.docx
-
寄语大全之学前班幼儿教师寄语.docx
-
家教资格证考试试题库.docx
-
甲板部干部船员职责.docx
-
监理招标要求.docx
-
建筑工程质量通病防治手册.docx
-
健康管理师三级《理论知识》能力测试试题D卷 含答案.docx
-
江苏省无锡江阴市届九年级语文上学期期末试题 苏教版分析.docx
-
江西省党政机关会议定点管理办法.docx
-
教科版五年级科学上全册知识要点.docx
-
教师三月工作总结小学教师工作总结.docx
-
教师专业化与专业发展自测题.docx
