 工业机器人焊接工作站基本原理与操作.docx
工业机器人焊接工作站基本原理与操作.docx
- 文档编号:9378595
- 上传时间:2023-02-04
- 格式:DOCX
- 页数:12
- 大小:1.40MB
工业机器人焊接工作站基本原理与操作.docx
《工业机器人焊接工作站基本原理与操作.docx》由会员分享,可在线阅读,更多相关《工业机器人焊接工作站基本原理与操作.docx(12页珍藏版)》请在冰豆网上搜索。
工业机器人焊接工作站基本原理与操作
工业机器人焊接工作站基本原理与操作
机器人焊接工作站基本原理与操作
一.机器人焊接工作站基本原理
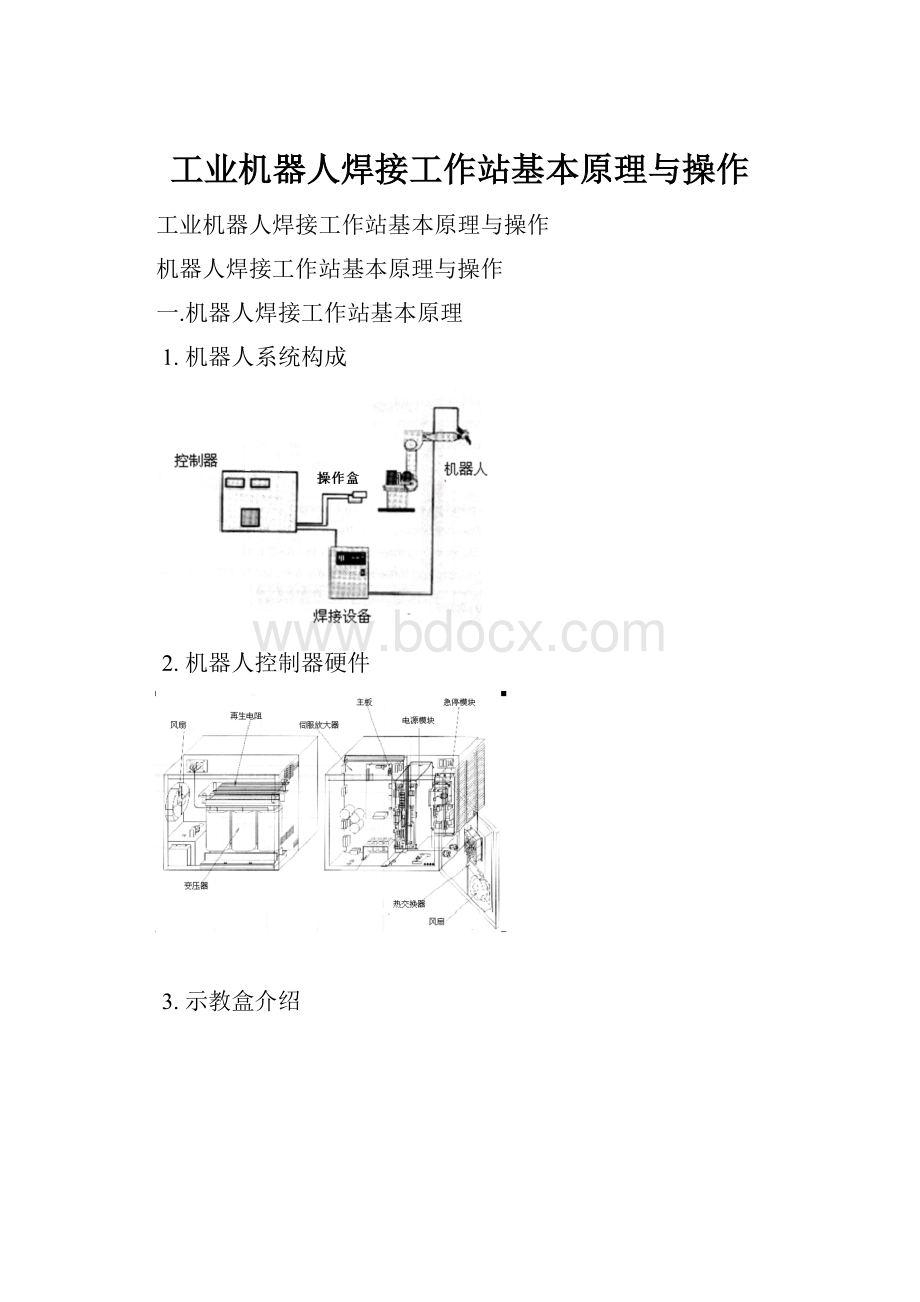
1.机器人系统构成
2.机器人控制器硬件
3.示教盒介绍
A、示教盒(TP)的作用
D、如何创建程序
1)按住select键显示程序目录画面
2)选择F2CREATE
3)移动光标选择程序命名方式再使用功能键(F1-F5)输入程序名
4)按ENTER键确认,按F3EDIT进入
E、运动指令介绍
F、如何编辑运动指令
G、如何用TP启动程序
1)方式一.顺序单步执行
2)方式二.顺序连续执行
3)方式三.逆序单步执行
二.机器人焊接工作站基本操作
1.钻杆焊接机器人生产-主操作流程
1)在触摸屏上选择需要焊接的钻杆型号,并将数据发给控制系统。
2)按下操作台上流程启动按钮,主动头、出料系统、焊接支撑、从动头根据配方系统中的工件长度自动移动到需要移动的位置。
3)传输小车发出传输到位信号,我方接收到后,主动头和从动头退开1000mm。
(附:
由于传输小车目前无法发送该信号,我方增加一个1100mm物体感应开关,用金属片等物体挡住感应开关10秒即可,如后续传输小车可以发送,将感应开关拆除,连接传输小车信号即可)
4)人工观察传输小车位置是否合适,再按下流程启动按钮,接料机构自动伸出接料,自动将钻杆定位到卡盘中心,主动头及从动头前进1000mm,液压扳手自动下降,插入卡盘夹紧孔内,人工操作旋钮,将卡盘夹紧。
。
5)人工确认工件夹紧后,按下焊接启动,变位机自动旋转,激光传感器自动搜索工件键条位置,搜到到后变位机退回10度,该步骤作用是消除传输过程中钻杆的旋转误差,变位机继续旋转,机器人再用激光进行精确寻找,该步骤是为了钻杆键条位置精确定位,变位机停止旋转,机器人再用激光寻找到后机器人开始焊接,该步骤是为了消除布键的误差。
6)焊接完成后机器人自动回到零位,人工确认传输小车位置是否合适,按下流程启动按钮,液压扳手插入卡盘旋转孔,接料机构自动抬升,手工控制松开卡盘,按下流程启动按钮,接料机构自动将工件送到传输小车上,并自动缩回,主动头、出料系统、焊接支撑、从动头回到原点位置,等待下次焊接。
2.钻杆焊接机器人生产-机器人流程
1)在正常情况下,机器人根据配方系统中的工件选号自动调号后焊接完成当前钻杆。
此处涉及的是不同规格的钻杆第一次机器人程序编制流程。
2)运行机器人1号,调用钻杆定位寻点子程序(BWJ),记录第一次定位钻杆位置;转动钻杆,记录键中心位置;编制钻杆第二次定位程序。
运行变位机旋转原点程序(BWJ_YD)和定位程序,检查定位精度。
3)编制机器人焊接寻点程序、焊接程序和滑台移动程序
4)模拟焊接全流程一遍,确保安全性后存盘保存。
5)下次焊接同类型产品,直接调用相关程序即可。
3.钻杆焊接机器人生产-机器人流程
1)在正常情况下,机器人根据配方系统中的工件选号自动调号后焊接完成当前钻杆。
此处涉及的是不同规格的钻杆第一次机器人程序编制流程。
2)运行机器人1号,调用钻杆定位寻点子程序(BWJ),记录第一次定位钻杆位置;转动钻杆,记录键中心位置;编制钻杆第二次定位程序。
运行变位机旋转原点程序(BWJ_YD)和定位程序,检查定位精度。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 工业 机器人 焊接 工作站 基本原理 操作
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《JAVA编程基础》课程标准软件16级.docx
《JAVA编程基础》课程标准软件16级.docx
-
《分数的初步认识》.docx
-
《金属钠的性质与应用》教学设计.docx
-
《蚕妇》.docx
-
《会计》教材Word版第14章非货币性资产交换.docx
-
《与朱元思书》教学案例及反思.docx
-
《小壁虎借尾巴 》教案.docx
-
1第一部分 辅导员岗位基本知识.docx
-
09年CFO复习题.docx
-
2G1计算书.docx
-
17 古诗五首夜雨寄北一等奖教案.docx
-
240T15mw机组整体启动方案解析.docx
-
485总线设计方案加上位机扩展.docx
-
Aspose Word模板使用总结.docx
-
CDMA掉话分析.docx
-
C++新闻信息管理系统.docx
-
《HSE管理体系的策划与运行》.docx
-
c语言改错题及答案.docx
-
CMS7000使用说明资料.docx
-
《财经法规与会计职业道德》模拟卷考试试题及答案资料.docx
-
《大众传播媒介的更新》教案2.docx
-
《教育知识与能力》中学版全国教师资格考试复习资料教学教材.docx
-
EPC施工组织设计1.docx
-
ERP在服装行业的信息化应用可行性研究报告.docx
-
《项羽之死》教案人教版高二选修教学设计.docx
-
《公共关系实务》总复习资料.docx
-
FLUKE744过程校准仪经典实例免费给大家会让你未来的道路更通达.docx
-
《护士条例》试题.docx
-
2F男鞋统装规范84.docx
-
4测试用例修复方法与工具.docx
-
MC尼龙轮项目可行性研究报告.docx
-
Weblogic Server系统管理手册.docx
 比格餐饮标杆研究PPT资料.pptx
比格餐饮标杆研究PPT资料.pptx
-
深圳尊地地产龙座国际提案报告优质PPT.ppt
-
毕业中期答辩模板PPT资料.ppt
-
毕博-紫光人力资源培训PPT文档格式.ppt
-
深圳宏发领域-公寓营销策划报告PPT推荐.ppt
-
电子鼻用于水果品质、成熟度等鉴别的应用总结Word文档格式.docx
-
电子政务外网建设与应用情况介绍Word格式.doc
-
电容产品选型目录Word格式.doc
-
电子政务系统技术Word格式文档下载.doc
-
电梯监理资料Word格式文档下载.docx
-
电工进网作业许可培训考试题(第二套)Word格式.doc
-
电容式触摸感应按键技术原理及应用Word下载.doc
-
深圳建行办理金融社保卡指南PPT资料.ppt
-
深圳新一佳培训==生鲜区商品陈列17页PPT课件下载推荐.ppt
-
电子商务对中小贸易公司影响与对策Word下载.doc
-
毕博做的人力资源培训材料优质PPT.ppt
-
电子警察系统工程施工指导书Word格式文档下载.doc
-
电子系统设计实验大纲2013年文档格式.doc
-
深圳市商业市场深度调研报告(上)优质PPT.ppt
