 单片机红外发射原理与设计程序.docx
单片机红外发射原理与设计程序.docx
- 文档编号:9337801
- 上传时间:2023-02-04
- 格式:DOCX
- 页数:14
- 大小:106.29KB
单片机红外发射原理与设计程序.docx
《单片机红外发射原理与设计程序.docx》由会员分享,可在线阅读,更多相关《单片机红外发射原理与设计程序.docx(14页珍藏版)》请在冰豆网上搜索。
单片机红外发射原理与设计程序
用AT89S51单片机制作红外电视遥控器
一般红外电视遥控器的输出都是用编码后串行数据对38~40kHz的方波进行脉冲幅度调制而产生的。
当发射器按键按下后,即有遥控码发出,所按的键不同遥控编码也不同。
这种遥控码具有以下特征:
采用脉宽调制的串行码,以脉宽为0.565ms、间隔0.56ms、周期为1.125ms的组合表示二进制的“0”;以脉宽为0.565ms、间隔1.685ms、周期为2.25ms的组合表示二进制的“1”。
上述“0”和“1”组成的32位二进制码经38kHz的载频进行二次调制,然后再通过红外发射二极管产生红外线向空间发射。
一般电视遥控器的遥控编码是连续的32位二进制码组,其中前16位为用户识别码,能区别不同的红外遥控设备,防止不同机种遥控码互相干扰。
后16位为8位的操作码和8位的操作反码,用于核对数据是否接收准确。
根据红外编码的格式,发送数据前需要先发送9ms的起始码和4.5ms的结果码。
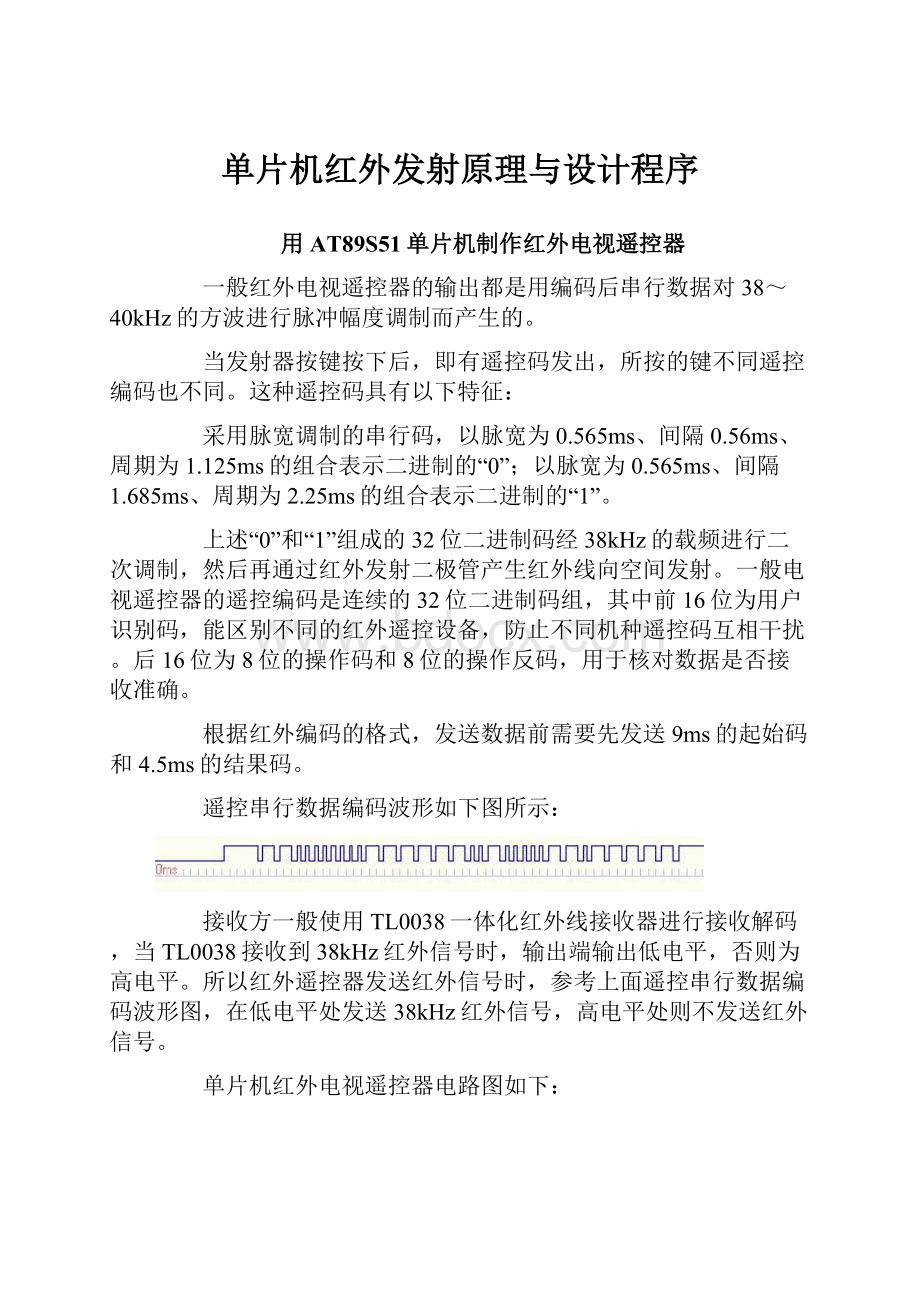
遥控串行数据编码波形如下图所示:
接收方一般使用TL0038一体化红外线接收器进行接收解码,当TL0038接收到38kHz红外信号时,输出端输出低电平,否则为高电平。
所以红外遥控器发送红外信号时,参考上面遥控串行数据编码波形图,在低电平处发送38kHz红外信号,高电平处则不发送红外信号。
单片机红外电视遥控器电路图如下:
C51程序代码:
#include
staticbitOP; //红外发射管的亮灭
staticunsignedintcount; //延时计数器
staticunsignedintendcount;//终止延时计数
staticunsignedcharflag; //红外发送标志
chariraddr1; //十六位地址的第一个字节
chariraddr2; //十六位地址的第二个字节
voidSendIRdata(charp_irdata);
voiddelay();
voidmain(void)
{
count=0;
flag=0;
OP=0;
P3_4=0;
EA=1;//允许CPU中断
TMOD=0x11;//设定时器0和1为16位模式1
ET0=1;//定时器0中断允许
TH0=0xFF;
TL0=0xE6;//设定时值0为38K也就是每隔26us中断一次
TR0=1;//开始计数
iraddr1=3;
iraddr2=252;
do{
delay();
SendIRdata(12);
}while
(1);
}
//定时器0中断处理
voidtimeint(void)interrupt1
{
TH0=0xFF;
TL0=0xE6;//设定时值为38K也就是每隔26us中断一次
count++;
if(flag==1)
{
OP=~OP;
}
else
{
OP=0;
}
P3_4=OP;
}
voidSendIRdata(charp_irdata)
{
inti;
charirdata=p_irdata;
//发送9ms的起始码
endcount=223;
flag=1;
count=0;
do{}while(count //发送4.5ms的结果码 endcount=117 flag=0; count=0; do{}while(count //发送十六位地址的前八位 irdata=iraddr1; for(i=0;i<8;i++) { //先发送0.56ms的38KHZ红外波(即编码中0.56ms的低电平) endcount=10; flag=1; count=0; do{}while(count //停止发送红外信号(即编码中的高电平) if(irdata-(irdata/2)*2) //判断二进制数个位为1还是0 { endcount=41; //1为宽的高电平 } else { endcount=15; //0为窄的高电平 } flag=0; count=0; do{}while(count irdata=irdata>>1; } //发送十六位地址的后八位 irdata=iraddr2; for(i=0;i<8;i++) { endcount=10; flag=1; count=0; do{}while(count if(irdata-(irdata/2)*2) { endcount=41; } else { endcount=15; } flag=0; count=0; do{}while(count irdata=irdata>>1; } //发送八位数据 irdata=p_irdata; for(i=0;i<8;i++) { endcount=10; flag=1; count=0; do{}while(count if(irdata-(irdata/2)*2) { endcount=41; } else { endcount=15; } flag=0; count=0; do{}while(count irdata=irdata>>1; } //发送八位数据的反码 irdata=~p_irdata; for(i=0;i<8;i++) { endcount=10; flag=1; count=0; do{}while(count if(irdata-(irdata/2)*2) { endcount=41; } else { endcount=15; } flag=0; count=0; do{}while(count irdata=irdata>>1; } endcount=10; flag=1; count=0; do{}while(count flag=0; } voiddelay() { inti,j; for(i=0;i<400;i++) { for(j=0;j<100;j++) { } } } 制作的实物如下图所示: 步进电机 #include #defineuintunsignedint #defineucharunsignedchar #definems*77 //f=12M #defineLEDLen4 #defineDj_star(){IE=0x81;pri_dj=0;} #defineDj_stop(){IE=0x00;pri_dj=1;P1=0xff;shache="0";delay(800ms);delay(800ms);delay(400ms);shache=1;} #defineChilun_Num8 /*齿轮数8个*/ #defineset_display_num(){LEDBuf[0]=tmp/1000;LEDBuf[1]=tmp/100%10;\ LEDBuf[2]=tmp/10%10;LEDBuf[3]=tmp%10;} ucharLEDBuf[LEDLen]={0,0,0,0}; voidread_num();/*读播码盘到set_round_num*8*/ voiddisplay(); voiddelay(uintdelay_time){uinti;for(i=0;i voidrun(); voidfx_run(); uintround_num=0;/*记录已转的齿轮数,中断1次加1*/ uintset_round_num=0;/*播码盘设置圈数*/ uintset_pwm_width=0;/*播码盘设置步进电机正向速度*/ bitone_round_flg=0; sbitled_1000=P0^7;//usefordisplay sbitled_100=P0^6;//usefordisplay sbitled_10=P0^5;//usefordisplay sbitled_1=P0^4;//usefordisplay sbitkey_start=P3^0; sbitkey_puse=P3^0; sbitkey_clear=P3^1; /*P3^2接齿轮传感器中断*/ sbitbujin_zx_stop=P3^3;/*接步进电机,正向到位传感器,为0停机*/ sbitbujin_fx_stop=P3^4;/*接步进电机,反向到位传感器,为0停机*/ sbitshache=P3^5;/*接刹车控制继电器0电位有效*/ sbitpri_dj=P3^6;/*接主电机控制继电器0电位有效*/ voidmain(){ TCON=0x01; display(); while (1){ IE="0x00"; round_num=0; display(); if(bujin_fx_stop)fx_run(); while(key_start); delay(8ms); if(! key_start){ read_num(); //set_round_num=8; while(! key_start); run(); fx_run(); } } } voidrun(){ #defineDelay_time180 /*转一圈50次循环,每循环4步,50*4=200,200*1。 8=360*/ uchari; P1=0xff; set_pwm_width=15+set_pwm_width/10; while (1){ while(! shache|! key_start); Dj_star(); for(i="0";bujin_zx_stop&! pri_dj;i++){ P1=0xf9; delay(Delay_time);//bujin_zx_stop=P3^3; P1=0xfc;//bujin_fx_stop=P3^4; delay(Delay_time);//key_puse=P3^0; P1=0xf6;//key_clear=P3^1; delay(Delay_time);//shache=P3^5; P1=0xf3;//pri_dj=P3^6; delay(Delay_time); if(i==set_pwm_width){P1=0xff;i=0;one_round_flg=0;while(! one_round_flg&key_puse);} if(! key_puse){delay(4ms);if(! key_puse)break;} } P1=0xff; if(pri_dj)break; if(! key_puse){ delay(8ms); if(! key_puse){ Dj_stop(); while(! key_puse); //nextpreekey while(! shache); while (1){ while(key_puse&key_clear); delay(8ms); if(! key_clear){round_num=0;display();} if(! key_puse)break; } while(! key_puse); delay(8ms); while(! key_puse); } } } } voidext_int0(void)interrupt0{/*主电机齿轮中断*/ uinttmp; EA=0; if(! pri_dj){ round_num++; if(round_num%Chilun_Num==0){ one_round_flg=1; tmp=round_num/Chilun_Num; set_display_num(); P0=0xf0; P0=P0|LEDBuf[0]; led_1000=0; P0|=0xf0; P0=0xf0; P0=P0|LEDBuf[1]; led_100=0; P0|=0xf0; P0=0xf0; P0=P0|LEDBuf[2]; led_10=0; P0|=0xf0; P0=0xf0; P0=P0|LEDBuf[3]; led_1=0; P0|=0xf0; P0=0xf0; } if(round_num>=set_round_num)Dj_stop(); } EA=0x81; } voiddisplay(){ uchari; uinttmp=0; tmp=round_num/Chilun_Num; set_display_num(); for(i=0;i P0=0xf0; P0=P0|LEDBuf[i]; if(i==0)led_1000=0;//P0^4 if(i==1)led_100=0;//P0^5 if(i==2)led_10=0;//P0^6 if(i==3)led_1=0;//P0^7 P0|=0xf0; } P0=0xf0; } voidread_num(){ /*读播码盘到set_round_num,set_pwm_width*/ uchartmp; P2=0xFF; P2=0xEF;//11101111 delay(1ms); tmp=~(P2|0xF0); P2=0xDF;//11011111 delay(1ms); tmp=(~(P2|0xF0))*10+tmp; set_round_num=tmp; P2=0xBF;//10111111 delay(1ms); tmp=(~(P2|0xF0)); P2=0x7F;//01111111 delay(1ms); tmp=(~(P2|0xF0))*10+tmp; set_round_num=set_round_num+tmp*100; set_round_num=set_round_num*Chilun_Num; P2=0xFF; P1=0xbF;//01111111 delay(1ms); tmp=~(P2|0xF0); P1=0xFF; P2=0xFF; P1&=0x7F;//10111111 delay(1ms); tmp=(~(P2|0xF0))*10+tmp; set_pwm_width=tmp; P1=0xFF; P2=0xFF; } voidfx_run(){ #definef_Delay_time180 while(bujin_fx_stop){/*反向回车直到传感器动作*/ P1=0xf3;//0011 delay(f_Delay_time); P1=0xf6;//0110 delay(f_Delay_time); P1=0xfc;//1100 delay(f_Delay_time); P1=0xf9;//1001 delay(f_Delay_time); } P1=0xff; }


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 单片机 红外 发射 原理 设计 程序
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《Java程序设计》考试大纲及样题试行.docx
《Java程序设计》考试大纲及样题试行.docx
-
《工业企业管理》自学任务书.docx
-
《短歌行》原文翻译及赏析.docx
-
《跳水》教案3.docx
-
《基于MATLAB的信号与系统实验指导》编程练习.docx
-
《你是最棒的》教学设计.docx
-
《选修4化学反应原理》知识点总结整理超全.docx
-
2环境应急监测试题资料.docx
-
《自动化仪表工程施工及验收规范》GB50093仪表安装检验批.docx
-
09年法律硕士民法预热辅导第2102讲完整篇doc.docx
-
6阅读能力阅读方法指什么.docx
-
《豆蔻镇的居民和强盗》读后感.docx
-
CMYK色值参考.docx
-
3121护理查对制度.docx
-
《草莓》课堂教学课件5篇.docx
-
CCNA完整知识点.docx
-
《合理安排时间》说课稿.docx
-
18我的伯父鲁迅先生.docx
-
3dmax授课计划doc.docx
-
《中共中央国务院关于加快推进生态文明建设的意见》.docx
-
《永生的眼睛》练习题附答案.docx
-
flow3d官方培训教程中的实例中文说明.docx
-
《宪法》《监察法》应知应会100题含答案.docx
-
EMS基础知识综合练习复习资料.docx
-
100以内退位减法500道带竖式空间可直接打印.docx
-
207声屏障施工组织设计.docx
-
30个科学小常识教学提纲.docx
-
JGJ59建筑施工安全检查标准评分表全套.docx
-
12幼儿园保育员培训活动记录表.docx
-
minecraft匠魂教程.docx
-
c语言课程设计学生成绩管理系统.docx
-
0503新闻传播学基本要求.docx
-
18883标准和50325标准的区别Word格式.docx
-
BL系列台车设计说明书Word下载.docx
-
广元市初中学业及高中阶段学校招生考试说明Word格式.docx
-
供电局长在安全工作会总结讲话Word下载.docx
-
就业创业大赛教案文档格式.docx
-
Chapter 5 Discounted Cash Flow Valuation5章现金流量折现法Word格式文档下载.docx
-
厦门电子地方税务局办税服务中心文档格式.docx
-
Autelan交换机产品命令行配置手册文档格式.docx
-
山东省济南外国语学校届高三综合测试生物试题Word格式.docx
-
山东省四五普法考试试题范围Word下载.docx
-
贵州省黔东南州届高三英语上学期第一次联考试题文档格式.docx
-
构造地质学习题Word文件下载.docx
-
C语言经典例题100例文档格式.docx
-
CMMI3和CMMI4Word文档格式.docx
-
ERP实训总结报告Word格式文档下载.docx
-
CRTSⅢ型板式无砟轨道安全施工管理办法Word文件下载.docx
-
管道支架制作安装标准Word下载.docx
-
国际关系领域的理论Word下载.docx
-
国家社科基金成功中标申请书范本Word格式文档下载.docx
