 S120基本定位S7300通讯.docx
S120基本定位S7300通讯.docx
- 文档编号:9257833
- 上传时间:2023-02-03
- 格式:DOCX
- 页数:29
- 大小:950.38KB
S120基本定位S7300通讯.docx
《S120基本定位S7300通讯.docx》由会员分享,可在线阅读,更多相关《S120基本定位S7300通讯.docx(29页珍藏版)》请在冰豆网上搜索。
S120基本定位S7300通讯
S7-300DP通讯控制S120完成基本定位功能
一.通过DP总线实现S7-300与SINAMICSS120通讯
1.1DP总线通讯功能
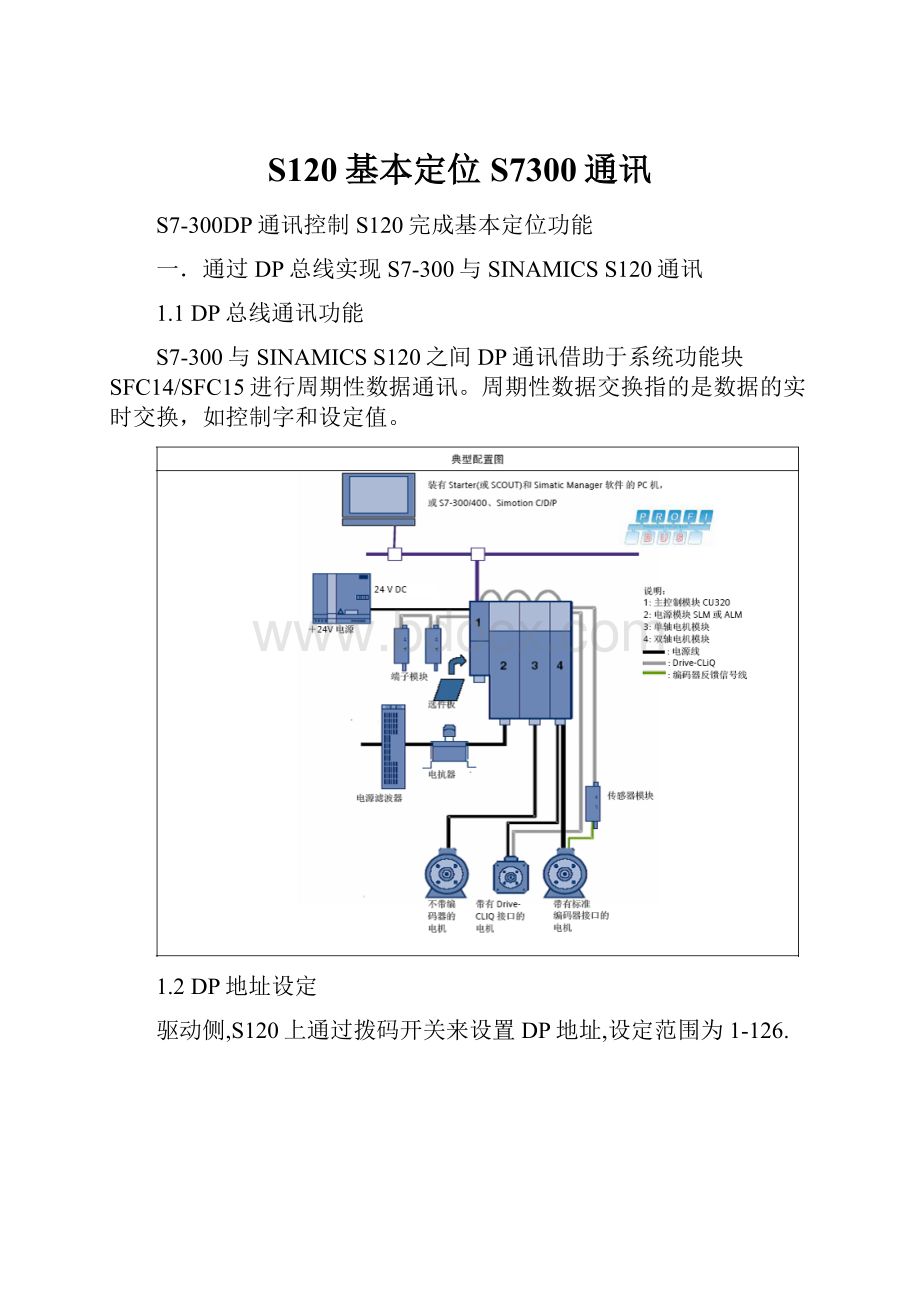
S7-300与SINAMICSS120之间DP通讯借助于系统功能块SFC14/SFC15进行周期性数据通讯。
周期性数据交换指的是数据的实时交换,如控制字和设定值。
1.2DP地址设定
驱动侧,S120上通过拨码开关来设置DP地址,设定范围为1-126.
当所有拨码拨至ON或者OFF状态时,通过P918参数设置DP地址。
1.3STEP7硬件配置
在STEP7中新建项目,点击Insert-Station-2.Simatic300Station
打开硬件组态,新建DPNETWORK,在CATALOG中选择相应S120产品,如SINAMICSS120CU320,将其加入DP总线,DP地址设置应与驱动侧设置地址一致。
选择相应的S120Firmware版本,如V2.5
此时会要求选择Messageframe,点击选中Object1,然后点击Deleteslot,
这时Messageframeselection为None。
点击OK。
保存编译硬件组态,将其下载至PLC中。
注:
此时仅将PLC硬件配置完成,S7-300与S120之间通讯尚未建立,CPU会BF灯亮,SF等闪烁,S120侧LEDDP灯不亮。
1.4S120配置
打开STEP7,此时会出现SINAMICSS120CU320,点击OpenObject打开S120项
目。
打开S120项目后,选择在线Connecttotargetsystem
若是新的CF卡可选择自动配置AutomaticConfiguration,通过DRIVE-CLIQ口将S120硬件配置装载至PG电脑。
若是旧CF已有配置,可选择工厂复位,将参数复位到出厂状态。
点击Startautomaticconfiguration按钮,开始自动配置
提示选择S120驱动类型,选择SERVO伺服方式。
配置完毕出现下图画面,点击close
此时需要离线配置,点击Disconnectfromtargetsystem
配置驱动SERVO_02,点击ConfiureDDS
出现S120驱动配置画面,将前三项都打勾,激活基本定位功能。
配置MotorModule,由于之前已有Drive-CLIQ将配置读上来,直接Continue
出现提示,将P0864Infeedinoperation设为1
配置电机,直接由ConnectionX1通过DriveCLIQ读出电机信息
选择电机是否有抱闸刹车
选择编码器类型
已有DriveCLIQ读出
在Mechanics画面中
设置传动比,Loadrevolutions和Motorrevolutions
设置S120电机一圈所对应的长度单位LU。
LUperloadrevolutions(positionsetpoint/actual)画面中将值设为了10000,即电机一圈代表走了10000个LU
注:
LUperloadrevolutions(positionsetpoint/actual)设置的值与编码器精度有关,不能大于LUperloadrevolutions(Encoderrevolutions)的值
Activemodulocorrection
激活模态,对于电机设定的长度和实际长度从360000LU开始回到0,循环执行。
即0-360000再回到0.
选择通讯报文,对于基本定位的报文选择SIEMENStelegram110,PZD-12/7
完成配置。
点击SINAMICS_S120_CU320下Configuration
可以看到会有红色惊叹号,且地址为问号,点击TransfertoHWConfig
将配置传送到硬件组态中。
点击ACTIVE按钮并将其激活。
保存编译。
再返回到SINAMICS_S120_CU320下Configuration画面,可以看到
红色惊叹号变为蓝色的勾,地址也已经分配为256开始的地址。
保存编译整个项目。
连线。
下载整个项目。
1.5S7-300中通讯编程
利用SFC14和SFC15读写S120,达到通讯控制S120的目的。
SFC14读,占用7个PZD
在LADDR填写S120硬件地址,256对应16进制即W#16#100
RECORD中填写设定DB地址P#DB2.DBX0.0BYTE14,即从DB2.DBX0.0开始的14个BYTE的地址分配为从S120里读出的PZD值
RET_VAL返回值显示故障信息
SFC15写,占用12个PZD
在LADDR填写S120硬件地址,256对应16进制即W#16#100
RECORD中填写设定DB地址P#DB1.DBX0.0BYTE20,即从DB1.DBX0.0开始的20个BYTE的地址分配为向S120里写的PZD值
RET_VAL返回值显示故障信息
定义相对应的DB块DB1DB2
1.6基本定位
1.6.1JOG点动
S120中基本定位功能的点动有两种方式
速度方式:
点动按钮按下,轴以设定的速度运行直至按钮释放
位置方式:
点动按钮按下并保持,轴以设定的速度运行至目标位置后自动停止
在通过通讯控制S120之前需注意,需将PLC与S120的通讯控制位置1
即将P854MasterctrlbyPLC参数对应r2090bit10,即DB1.DBX0.2
执行点动功能,需先使能S120ON/OFF1(P840)
打开Drives下Servo_02下Controllogic可以看到相关控制字及状态字
可以看到,由于之前选择了报文结构110,已经自动将控制字配置好。
P840ON/OFF1相对应的是r2090bit0,即PZD1的bit0
我们已经定义好通过通讯写S120PZD的地址,PZD1Bit0对应的DB地址即DB1.DBX1.0。
还有P844bit1OFF2信号即r2090bit1对应DB1.DBX1.1
P845bit1OFF3信号即r2090bit2对应DB1.DBX1.2
P852Enableoperation即r2090bit3对应DB1.DBX1.3
将这些信号都置1.S120使能。
点击Servo_02-Technology-BasicPsitioner-JOG,进入JOG画面
设置点动命令源
Jog1signalssource即r2090bit8DB1.DBX0.0
Jog2signalssource即r2090bit9DB1.DBX0.1
点动方式选择0速度1位置
Joggingincremental即r2092bit5DB1.DBX5.4
在AnalogSignal画面中
Velocityoverride即r2050[4]PZD5DB1.DBW8
此为点动速度的倍率,通过修改其值来改变点动的速度,16进制4000H,10进制16384对应100%
在Configurejogsetpoints画面中设置JOG1和JOG2的速度和位置
1.6.2回零/寻参
点击Servo_02-Technology-BasicPsitioner-Homing,进入Homing画面
Homing又分activehoming主动回零和passivehoming(onthefly)被动回零.
Activehoming
如下图可以看到,主动回零分为三种形式
Homingoutputcamandencoderzeromark使用接近开关加编码器零位
Encoderzeromark仅编码器零位
Externalzeromark仅外部零标志
最常用的就是接近开关加编码器零位的方式
在homing/configuration
Referencingstartr2090bit11即DB1.DBX0.3为寻零开始信号
Searchforreference,referencecamr2092bit2即DB1.DBX5.2即外部接近开关
动作过程
1,将S120使能,P840DB1.DBX1.0置1
2,寻零开始信号置referencestartDB1.DBX0.3置1,电机开始运行
3,将外部接近开关信号对应referencecam,当DB1.DBX5.2为1时,电机减速,搜寻编码器零脉冲,遇到后停止。
寻零结束
当编码器为绝对值编码器时,会看到以下画面
在Homepositioncoordinate中设置坐标值,点击Performabsolutevaluecalibration做编码器校准即可
1.7基本定位_程序步(TraversingBlocks)
通过使用TraversingBlocks“程序步”模式可自动执行一个完整的定位程序,也可实现单步控制;但只有当前程序步执行完后下一个程序步才有效。
在S120中提供了最多64个程序步供使用。
1.7.1程序步设置
点击Servo_02-Technology-BasicPositioner-TraversingBlocks,进入画面
进入程序块设置画面,对于程序步有特定的数据结构,如下图
P2616(No.)每个程序步都要有一个任务号,运行时依此任务号顺序执行(-1表示无效的任务)
P2621(Job)表示该程序步的任务。
可选择:
Positioning(位置方式)、Endless_Pos/Endless_Neg(正、反向速度方式)、Waiting(等待指定的时间)Goto(跳转到指定的程序步)Set_0/Reset_0(置位/复位指定的开关量输出点)
P2622(Parameter)依赖于不同的Job,对应不同的Job有不同的意思
P2023.8/9(Mode)定义定位方式,仅当任务(Job)为位置方式(Position)时有效
P2617/P2618/P2619/P2620(Position,Velocity,Acceleration,Deceleration)指定运动的位置,速度,加减速
P2623.4/5/6(Advance)制定本任务结束方式。
END:
本任务结束不连续执行下一任务,Continue_With_Stop:
本任务结束准确定位,电机停止后重新启动开始下一任务。
Continue_Flying:
本任务结束连续执行下一任务。
1.7.2程序步示例如上图
第1步,以速度600,加减速100%,走绝对定位位置1000,本任务结束连续执行下一任务
第2步,以速度600,加减速100%,走相对定位-500,本任务结束准确定位后开始下一任务
第3步,Goto1,回到第1步,循环执行。
1.7.3程序步执行
1.选择不拒绝任务rejecttraversingtask和没有停止命令
P2641=r2090bit4即DB1.DBX1.4
P2640=r2090bit5即DB1.DBX1.5都置1
2.选择程序步选择位Traversingblockselectionbit
P2625=r2091bit0即DB1.DBX3.0置1
3.使能S120
P840=r2090bit0即DB1.DBX1.0置1
4.激活程序步Activetraversingtask(上升沿信号)
P2631=r2090bit6即DB1.DBX1.6置1
之后即按照之前程序步中设置的运行。
1.8Directsetponitspecification/MDI(直接设定点输入方式/手动数据设定方式)
1.8.1MDI有两种不同模式
位置(position)模式P2653=0
手动定位或称速度模式(settingup)P2653=1这两种模式可在线切换
速度模式是指轴按照设定的速度及加减速运行,不考虑轴的实际位置。
位置模式是指轴按照设定的位置、速度、加减速运行;
位置模式又可分为绝对位置(P2648=1)和相对位置(P2648=0)两种方式
1.8.2MDI执行步骤
1.使能S120
P840=r2090bit0即DB1.DBX1.0置1
2.directsetpointinput/MDIselection选择MDI模式
P2647=r2091bit15即DB1.DBX2.7置1
3.选择不拒绝任务rejecttraversingtask和没有停止命令
P2641=r2090bit4即DB1.DBX1.4
P2640=r2090bit5即DB1.DBX1.5都置1
4.设置MDI位置速度加减速参数
4.1Velocityoverride速度倍率
P2646=r2050[4],即DB1.DBW8W#16#4000对应100%
4.2Directsetpointinput/MDIpositionMDI位置
P2642=r2060[5],即DB1.DBD10
4.3Directsetpointinput/MDIvelocityMDI速度
P2643=r2060[7],即DB1.DBD14
4.4Directsetpointinput/MDIaccelerationMDI加速度
P2644=r2050[9],即DB1.DBW18W#16#4000对应100%
4.5Directsetpointinput/MDIaccelerationMDI加速度
P2644=r2050[9],即DB1.DBW18W#16#4000对应100%
4.6Directsetpointinput/MDIdecelerationMDI减速度
P2645=r2050[10],即DB1.DBW20W#16#4000对应100%
4.7Directsetpointinput/MDImodeMDI位置模式(相对/绝对)
P2654=r2050[11],即DB1.DBW22
SignalviaCI:
p2654=xx0xhex->absolute绝对位置
SignalviaCI:
p2654=xx1xhex->relative相对位置
SignalviaCI:
p2654=xx2xhex->abs_pos(onlyformodulocorrection)
绝对位置,正向(仅对模态)
SignalviaCI:
p2654=xx3xhex->abs_neg(onlyformodulocorrection)
绝对位置,反向(仅对模态)
5.SetpointacceptanceedgeMDI设置接收上升沿信号
P2650=r2090bit6,即DB1.DBX1.6
置1后即按照之前设定的速度位置开始MDI运行。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- S120 基本 定位 S7300 通讯
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《Java程序设计》考试大纲及样题试行.docx
《Java程序设计》考试大纲及样题试行.docx
-
《工业企业管理》自学任务书.docx
-
《短歌行》原文翻译及赏析.docx
-
《跳水》教案3.docx
-
《基于MATLAB的信号与系统实验指导》编程练习.docx
-
《你是最棒的》教学设计.docx
-
《选修4化学反应原理》知识点总结整理超全.docx
-
2环境应急监测试题资料.docx
-
《自动化仪表工程施工及验收规范》GB50093仪表安装检验批.docx
-
09年法律硕士民法预热辅导第2102讲完整篇doc.docx
-
6阅读能力阅读方法指什么.docx
-
《豆蔻镇的居民和强盗》读后感.docx
-
CMYK色值参考.docx
-
3121护理查对制度.docx
-
《草莓》课堂教学课件5篇.docx
-
CCNA完整知识点.docx
-
《合理安排时间》说课稿.docx
-
18我的伯父鲁迅先生.docx
-
3dmax授课计划doc.docx
-
《中共中央国务院关于加快推进生态文明建设的意见》.docx
-
《永生的眼睛》练习题附答案.docx
-
flow3d官方培训教程中的实例中文说明.docx
-
《宪法》《监察法》应知应会100题含答案.docx
-
EMS基础知识综合练习复习资料.docx
-
100以内退位减法500道带竖式空间可直接打印.docx
-
207声屏障施工组织设计.docx
-
30个科学小常识教学提纲.docx
-
JGJ59建筑施工安全检查标准评分表全套.docx
-
12幼儿园保育员培训活动记录表.docx
-
minecraft匠魂教程.docx
-
c语言课程设计学生成绩管理系统.docx
-
0503新闻传播学基本要求.docx
-
贵州省度国家工作人员学法考试及答案.docx
-
黑龙江龙东中考英语真题解析.docx
-
国画山水画之树的画法.docx
-
黑龙江省七台河市茄子河区教师招聘《教育理论基础知识》 真题及答案.docx
-
国际经济学简答题论述题集含答案.docx
-
关于环境实习报告7篇.docx
-
机场活动方案.docx
-
关于旅行的英语演讲稿5篇.docx
-
国家电网安规配电部分考试题库及答案共300题.docx
-
国家司法考试《行政法》模拟多选试题及答案.docx
-
关于如何学习土木专业桥梁工程课程的思考土木工程论文.docx
-
机电一体化技术专业建设及发展规划城乡园林规划工程.docx
-
机械工程师知识结构.docx
-
关于我国会计电算化发展问题的思考本科学位论文.docx
-
机械顶管施工方案.docx
-
国旗下的讲话演讲稿袁隆平.docx
-
技术方案模板华为.docx
-
关于障碍的名言.docx
-
国内贸易行业标准《鲜蛋冷链流通规范》修订.docx
