 线性控制系统教案5Youla参数化.docx
线性控制系统教案5Youla参数化.docx
- 文档编号:9234983
- 上传时间:2023-02-03
- 格式:DOCX
- 页数:12
- 大小:123.93KB
线性控制系统教案5Youla参数化.docx
《线性控制系统教案5Youla参数化.docx》由会员分享,可在线阅读,更多相关《线性控制系统教案5Youla参数化.docx(12页珍藏版)》请在冰豆网上搜索。
线性控制系统教案5Youla参数化
第五章:
Youla参数化和H-最优控制
TheYoulaParametrizationandH-OptimalControl
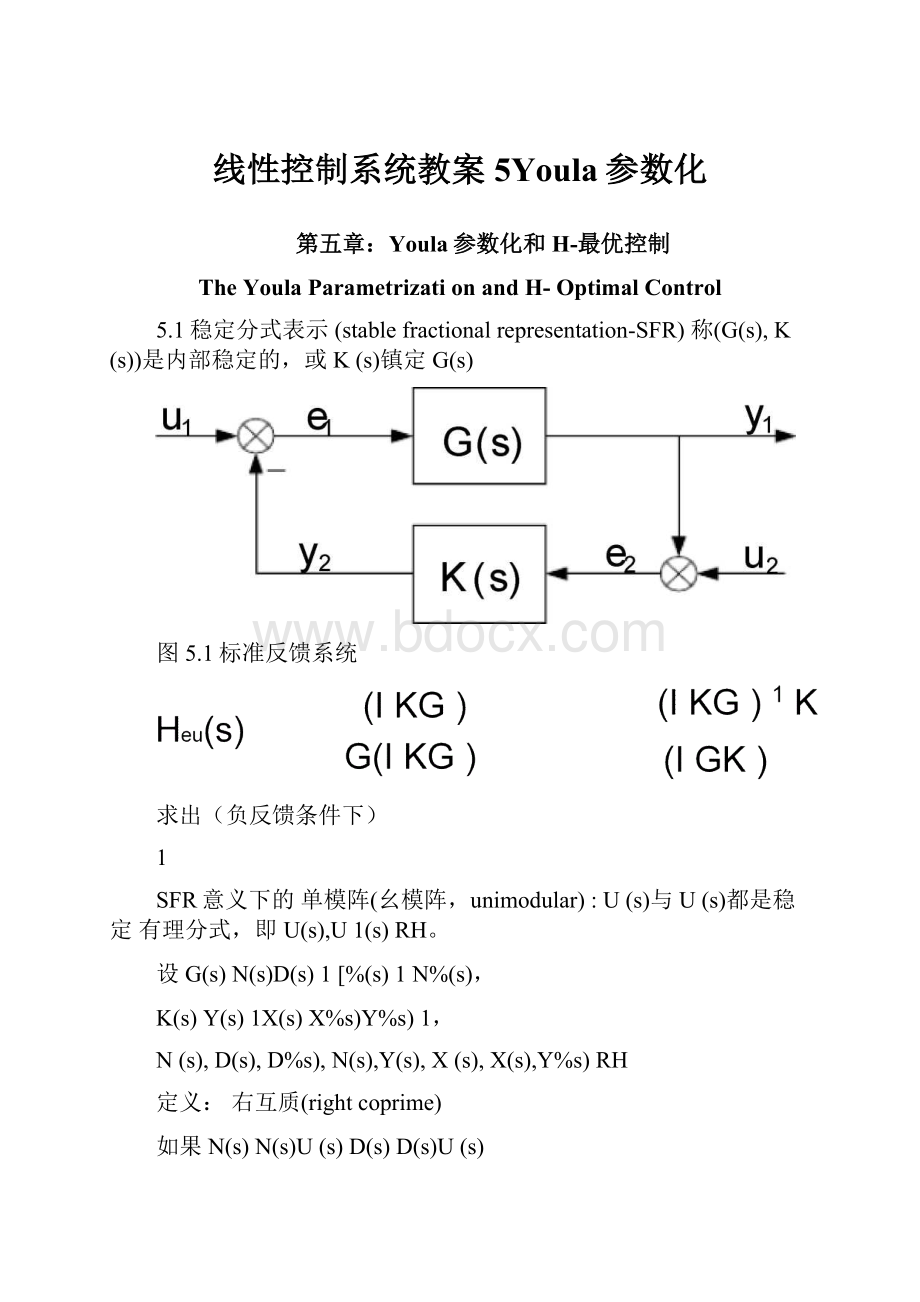
5.1稳定分式表示(stablefractionalrepresentation-SFR)称(G(s),K(s))是内部稳定的,或K(s)镇定G(s)
图5.1标准反馈系统
求出(负反馈条件下)
1
SFR意义下的单模阵(幺模阵,unimodular):
U(s)与U(s)都是稳定有理分式,即U(s),U1(s)RH。
设G(s)N(s)D(s)1[%(s)1N%(s),
K(s)Y(s)1X(s)X%s)Y%s)1,
N(s),D(s),D%s),N(s),Y(s),X(s),X(s),Y%s)RH
定义:
右互质(rightcoprime)
如果N(s)N(s)U(s)D(s)D(s)U(s)
只对单模阵U(s)成立,则称N(s)与D(s)右互质;
这时称G(s)N(s)D(s)1是不可约的(irreducible)
怎样判定N(s)与D(s)右互质?
存在稳定分式矩阵X(s),Y(s)使得X(s)N(s)Y(s)D(s)I。
如果G(s)N(s)D(s)1是不可约的(irreducible),则G(s)的极点是D(s)的零点。
SFR表示不是唯一的。
按G(s),K(s)上面的表示,
Heu(s)
D(YDXN)1YD(YDXN)1X
N(YDXN)1YIN(YDXN)1X
定理:
图5.1所示反馈系统内部稳定的充要条件是
YDXN是单模阵,即YDXN,(YDXN)1RH。
不失一般性,可以设YDXNI,进而,可以得到,如果K(s)镇定G(s),则存在N(s),D(s),D%(s),N%(s),Y(s),X(s),X%(s),Y%(s)RH,使得G(s)N(s)D(s)1D%(s)1N%(s),
K(s)Y(s)1X(s)X%(s)Y%(s)1,
YX
D
X%
I0
且满足N%D%
N
Y%
0I。
所有控制器的参数化
由上式可以得到(Y
RN%)D
(X
rD%N(s)I,R为任意稳定有理
真分式,则所有控制器的Youla参数化表示为:
S(G){K:
K(YRN%)1(XRD%),RRH,det(YRN%)0}。
如果G(s)是稳定的,则闭环系统内部稳定(K(s)镇定G(s))当且1
仅当QK(IGK)1是(指数)稳定的。
(按定理3.5,得出如果G稳定,闭环系统稳定当且仅当Q稳定.)
这时(IKG)1KQ,(IKG)1IQG,
(IGK)1G(IGQ)G,S(IGK)1IGQ灵敏度函数。
因此可得任意控制器为K(IQG)1Q,即
S(G){K:
K(IQG)1Q,QRH,det(lQG)0}
---所有控制器的Youla参数化表示。
稳定的传递函数集是一个环(ring)—stablefractionalrepresentations
(问题:
上例中G(s)的MFD描述是怎样的?
)
1
0
1
0
0
10
s
2s3
2(s4)(s
2)
s4
0
s4
2(s4)-
1s4
01
s
(s10)(s
1)
s10
s4
s10
1
0
1
0
0
所以K(s)
2(s
4)(s
2)
s4
2(s4)
2
(s
10)(s
1)
s10
s10
1
0
0
1
0
s2
s3
检验:
0
s4
2
s1
s4
2(s2)
s10
s4
(s1)
s4
0
「「1
s4s10
(s2)(s4)s3
另一方面,(s1)(s4)^^4竺勺
s10
则N(s),D(s),D%s),N%s),Y(s),X(s),X(s),Y%s)确定
5.2H-最优化问题H-Optimizationproblem
不精确已知被控对象的标准反馈结构如图6.1(P185)
无摄动时如图6.2(P186),设P(s)
Pds)P2G)
P21(s)P22(s)
使得zP1WP2U,yF21W%u。
使用反馈uKy得到
z[P1P2KU巳2K)p21]w:
Fl(P,K)w实际设计中通常要求:
minimizeF|(P,K)||
这就是H-最优化问题H-Optimizationproblem
本章内容:
1)问题是怎样产生(引出)的?
2)怎样用状态空间算法求解.
问题求解的思路:
首先应使系统稳定,给出所有镇定控制器的结构
(给出所有控制器的参数化表示);然后从控制器中选出最优的
5.2.1一个有启发意义的例子:
灵敏度最小
Amotivatingexample:
sensitivityminimization
HMMPAW旧RMmONA.VD亿Ol-r/UAJ
Figure63Feedbackconfigurationformochatin^example
图6.3(P187)所示,SISO系统,设d是未知扰动,但频谱限制在
0b,寻找一个控制器K使得扰动对输出y的影响最小
minimizes||,orminimizesupS(j)
S(IGK)1---灵敏度函数,在该频率段上幅值最小,但超出该段将导致噪声放大,使稳定性(裕度)变差。
通常设计取权函数
W(j)1,
0b;
W(j)=1,
b
则最小化问题
minimize
supW(j)S(j)
o
如定义
QK(I
GK)1,则
(IKG)
1KQ
(IKG)1
IQG,
(IGK)1G(I
GQ)Go
灵敏度函数
S(IGK)1IGQ。
这时优化问题转化为minimQzesupW(IGQ)(j)
stableQ
应用Youla参数化方法使我们转化设计问题作为一个几乎不受约束
的优化问题(Q任意取,保证系统正则稳定)。
该例显示:
Youla参数化可以简化优化问题。
如果JWS取幅值最小,则最优值J*是常值,即全通函数。
因此,选择权函数是至关重要的,这是一个敏感的(sensible)工程问题。
注意:
有时最优解是不可实现的;即问题可能无解(解是非正则控制
器)。
有的问题不用Youla参数化求解,不是H-问题。
5.3H-控制问题公式化
TheH-problemformulation
5.3.1几个H-问题的例子
灵敏度最小sensitivityminimization
h(P,K)P1P2KUP22K)1F21
Fl(P,K)W(IGK)1W[lGK(IGK)1]
P,W,p2WG,F21I,F>2G
一般考虑Pi,F2i是方形情况,当P2行比列多(F2i列比行多)更复杂。
加摄动下的鲁棒性Robustnesstoadditiveperturbations
Figure(L4Feedbackaroundapbuuwithiddlctvcuncertainty,190
WUIAPARAMETRIZA-UONANDOPTIMALCONTROL
如图6.4,6.5(P190-191),摄动的界依赖于与频率有关的函数
_((j))r(j),foreach
由小增益定理,如果K(lGK)〔,则闭环系统鲁棒稳定。
||K(IGK)1
rr1K(IGK)1r1rK(IGK)1
|rK(IGK)1]
转化为标准形式
F,(P,K)rK(IGK)1
则p10,p2rl,F2l1,P22G
混合特性和鲁棒性目标
Mixedperformanceandrobustnessobjective
为了得到好的干扰抑制性能(disturbance-rejectionperformance)和鲁
棒稳定性(robuststability),通常要求保持
W1G
p10,p2
P21I,F22g
W2G2122
5.3.2性能鲁棒:
一个未解决的(unsolved)问题
有些重要的设计问题不能转化为H-问题,如性能鲁棒当存在未建
模摄动时。
某些性能鲁棒问题可以转化为如下问题:
minirDizeDF(P,K)D1
其中D是对角的,可通过迭代求解D或K,给定D求K是标准H-问题,给定K求D是凸(convex)优化问题。
同时求最优的K和D不易实现。
5.4Youla参数化TheYoula(orQ)parametrization
5.4.1fractionalrepresentations分式表示
推广矩阵分式描述MatrixFractionDescription(MFD)到(稳定)分式表示
G(s)U(s)V1(s)X%1(s)U%s)
U(s),V(s),\%s),U%s)是稳定的传递函数,而且U(s),V(s)右互质,
V%),U%s)左互质。
重新定义单模阵(幺模阵unimodular)。
U(s),V(s)右互质:
UWX,VZXX,X1stableie,X,X1H
定理5.1(Bezout'theorem):
U(s)和V(s)右互质当且仅当存在X(s)和丫(s)使得
XUYVI。
线性系统的分式表示:
设G(s)有能稳能检测实现(AB,C,D),状态空间表示
x&AxBu
yCxDu取反馈uFxv,
x&(ABF)xBvy(CDF)xDv
则G(s)C(sIA)1BDN(s)M1(s)
应证明N(s),M(s)右互质(后面证)
另一方面,(与书中推导不同)
x&AxBux&(AHC)xHy(BHD)u(观测器)
yCxDuyCxDu
进而,得
[C(sIAHC)1HI]y[C(sIAHC)1(BHD)D]uM%(s)yN%(s)uG(s)M%1(s)N%(s)
5.4.2所有镇定控制器的参数化
Parametrizationofallstabilizingcontrollers正反馈系统(图6.4,图2.2P103)内稳定等价于
IK1(IKG)1(IKG)1K
GIG(IKG)1(IGK)1指数
定理5.2:
设稳定分式表示:
GNM1M%1N%,KUV1V%1U%则闭环系统内稳定当且仅当
M
1
U
V%
U%
1
N
V
和
N%
M%
是稳定的(即是单模阵)。
证明
•
•
I
K
1
1M
0
M
U
1
G
I
0
V
N
V
M
0
M
U
IK1IK1
0
V
与N
V
右互质,
与IK有相同的稳定性。
GIGI
定理5.3:
闭环系统内稳定,
GNM1M%1N%,KUV1V%1U%,
则M,N,h%Nu,V,UV可以被选择满足
(*)
V%U%MUI0
N%M%NV0I
如果GNM1h%1%寸应能稳能检测实现(A,B,C,D),则M(ABF,B,F,I)
N(ABF,B,CDF,D)
M%(AHC,H,C,I)
N%(AHC,BHD,C,D)
V%(AHC,BHD,F,I)
U%(AHC,H,F,0)
V(ABF,H,(CDF),I)
U(ABF,H,F,0)
MUFI0
ABF,[BH],,
NV(CDF)DI
V%U%FI0
烬M%AHC'[(BHD)H],C,DI
定理5.4:
设KoUVV%U%,GNM1I\%1NW足
V%U%MUoI0
N%M%nv0oI
则GNM1M^N%的任意镇定控制器可以表示为
KUV1V%%
(UoMQ)(V0NQ)1(V%QN)1(U%QI%
这里,任意QH。
几点说明:
1每取一个QH,K都是控制器;
2每一个控制器都能表示上面形式;
3
作业:
1.设系统传递函数为G(s)
已知一个控制器,所有控制器都可求。
2s1
s1s2
s1
s1s2
1求G(s)的Smith-McMillan标准形.
2求右互质多项式矩阵M(s),N(s),使G(s)N(s)M1(s).
3求右互质稳定分式矩阵M/s),Nds),使G(s)N1(s)MF(s).
K(s)的参数化
④求使系统(G(s),K(s))内部稳定的所有镇定控制器表示.


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 线性 控制系统 教案 Youla 参数
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《JAVA编程基础》课程标准软件16级.docx
《JAVA编程基础》课程标准软件16级.docx
-
《分数的初步认识》.docx
-
《金属钠的性质与应用》教学设计.docx
-
《蚕妇》.docx
-
《会计》教材Word版第14章非货币性资产交换.docx
-
《与朱元思书》教学案例及反思.docx
-
《小壁虎借尾巴 》教案.docx
-
1第一部分 辅导员岗位基本知识.docx
-
09年CFO复习题.docx
-
2G1计算书.docx
-
17 古诗五首夜雨寄北一等奖教案.docx
-
240T15mw机组整体启动方案解析.docx
-
485总线设计方案加上位机扩展.docx
-
Aspose Word模板使用总结.docx
-
CDMA掉话分析.docx
-
C++新闻信息管理系统.docx
-
《HSE管理体系的策划与运行》.docx
-
c语言改错题及答案.docx
-
CMS7000使用说明资料.docx
-
《财经法规与会计职业道德》模拟卷考试试题及答案资料.docx
-
《大众传播媒介的更新》教案2.docx
-
《教育知识与能力》中学版全国教师资格考试复习资料教学教材.docx
-
EPC施工组织设计1.docx
-
ERP在服装行业的信息化应用可行性研究报告.docx
-
《项羽之死》教案人教版高二选修教学设计.docx
-
《公共关系实务》总复习资料.docx
-
FLUKE744过程校准仪经典实例免费给大家会让你未来的道路更通达.docx
-
《护士条例》试题.docx
-
2F男鞋统装规范84.docx
-
4测试用例修复方法与工具.docx
-
MC尼龙轮项目可行性研究报告.docx
-
Weblogic Server系统管理手册.docx
-
AF空压机中文说明书客户用.docx
-
财政性学前教育经费在幼儿园之间的分配问题.docx
-
部编人教版七年级 语文下册名著阅读题含答案Word版.docx
-
电子商务概论知识点总结.docx
-
湖北仙桃生物中考模拟卷含答案.docx
-
江苏省科技公共服务平台绩效评估申报材料解读.docx
-
关于学校安全的规章制度.docx
-
555定时器工作原理及应用实例土豪版.docx
-
粉末冶金成形体裂纹产生的常见的原因.docx
-
火力发电厂行业技术标准规定清单.docx
-
国际市场营销试题及答案A.docx
-
Maab实验指导书含答案.docx
-
餐饮店厨房工作人员岗位职责.docx
-
吉林省安全工程师安全生产法法律规范考试题.docx
-
教育提高应注重知识培训多于人格培训辩论赛反方归纳版.docx
-
质量员土建继续教育培训计划大纲习题集.docx
-
DEH操作说明.docx
-
100 sentences.docx
-
江苏扬州中考真题生物.docx
