 基于51单片机控制红外通信.docx
基于51单片机控制红外通信.docx
- 文档编号:9172967
- 上传时间:2023-02-03
- 格式:DOCX
- 页数:14
- 大小:254.78KB
基于51单片机控制红外通信.docx
《基于51单片机控制红外通信.docx》由会员分享,可在线阅读,更多相关《基于51单片机控制红外通信.docx(14页珍藏版)》请在冰豆网上搜索。
基于51单片机控制红外通信
红外通信原理
红外遥控有发送和接收两个组成部分。
发送端采用单片机将待发送的二进制信号编码调制为一系列的脉冲串信号,通过红外发射管发射红外信号。
红外接收完成对红外信号的接收、放大、检波、整形,并解调出遥控编码脉冲。
为了减少干扰,采用的是价格便宜性能可靠的一体化红外接收头(HS0038,它接收红外信号频率为38kHz,周期约26μs)接收红外信号,它同时对信号进行放大、检波、整形得到TTL电平的编码信号,再送给单片机,经单片机解码并执行去控制相关对象。
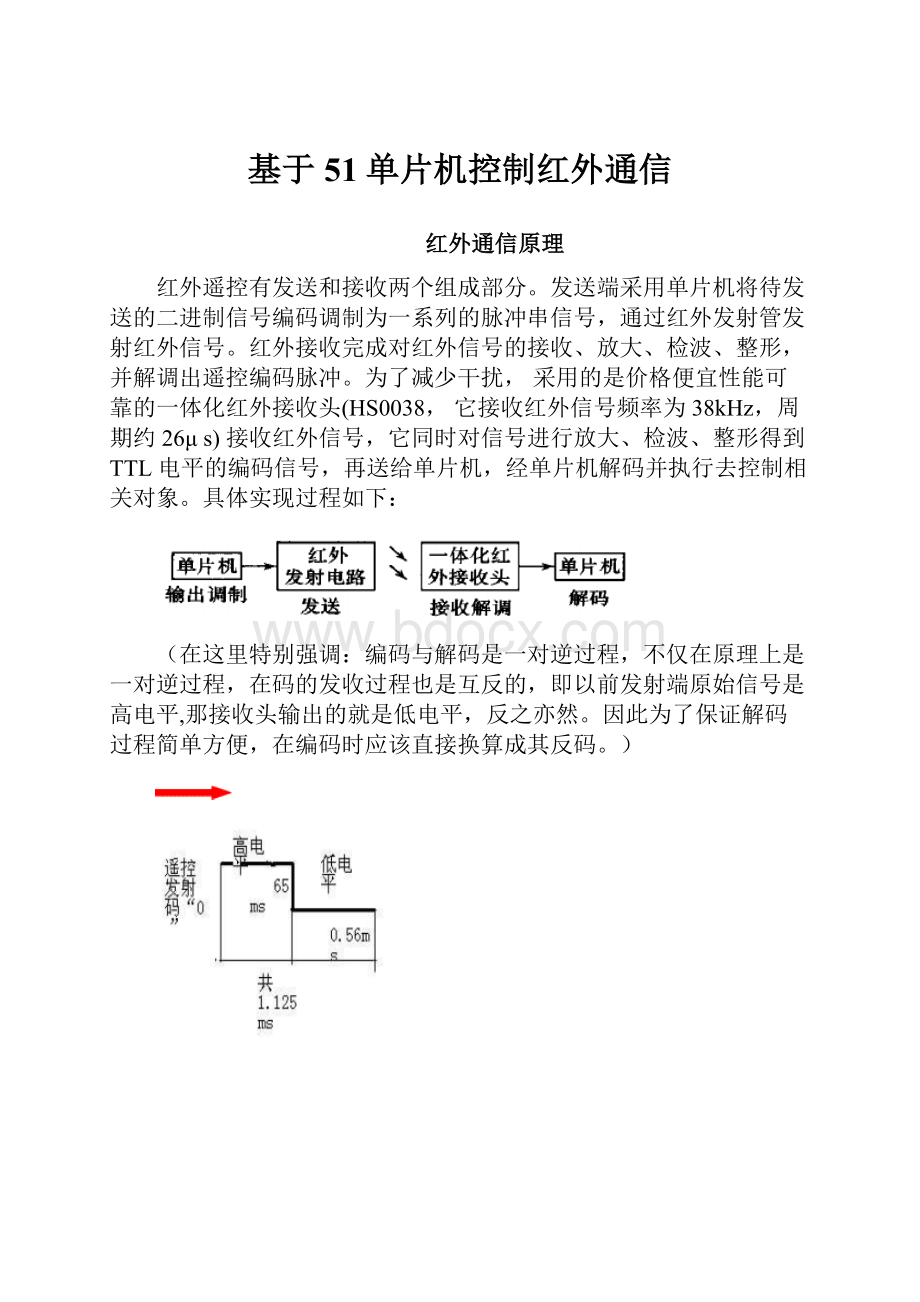
具体实现过程如下:
(在这里特别强调:
编码与解码是一对逆过程,不仅在原理上是一对逆过程,在码的发收过程也是互反的,即以前发射端原始信号是高电平,那接收头输出的就是低电平,反之亦然。
因此为了保证解码过程简单方便,在编码时应该直接换算成其反码。
)
1.红外发射部分:
下图为红外发射部分的电路拟图:
编码过程:
(1)二进制信号的调制
二进制信号的调制由单片机来完成,它把编码后的二进制信号调制成频率为38kHz的间断脉冲串(用定时器来完成),相当于用二进制信号的编码乘以频率为38kHz的脉冲信号得到的间断脉冲串,即是调制后用于红外发射二极管发送的信号。
(2)PPM编码
这种遥控编码具有以下特征:
遥控编码脉冲由前导码、16位地址码(8位地址码、8位地址码的反码)和16位操作码(8位操作码、8位操作码的反码)组成。
前导码:
是一个遥控码的起始部分,由一个9ms的高电平(起始码)和一个4.5ms的低电平(结果码)组成,作为接受数据的准备脉冲。
16位地址码:
能区别不同的红外遥控设备,防止不同机种遥控码互相干扰。
16位操作码:
用来执行不同的操作。
采用脉宽调制的串行码,以脉宽为0.56ms、间隔0.56ms、周期为1.12ms的组合表示二进制的“0”;以脉宽为1.68ms、间隔0.56ms、周期为2.24ms的组合表示二进制的“1”。
(3)发送程序
#include
staticbitOP; //红外发射管的亮灭控制位
staticunsignedintcount; //延时计数器
staticunsignedintendcount;//终止延时计数
staticunsignedcharflag; //红外发送标志
sbitP3_4=P3^4;
chariraddr1; //十六位地址的第一个字节
chariraddr2; //十六位地址的第二个字节
voidSendIRdata(charp_irdata);//发送子函数
voiddelay();
voidmain(void)
{
count=0;
flag=0;//无载波
OP=0;//不亮
P3_4=0;//在后面会发现用OP赋值的
EA=1;//允许CPU中断
TMOD=0x11;//设定时器0和1为16位模式1
ET0=1;//定时器0中断允许
TH0=0xFF;
TL0=0xE6;//设定时值0为38K也就是每隔26us中断一次
TR0=1;//开始计数
iraddr1=3;//自定义的一个地址
iraddr2=252;//地址反码
do{
delay();
SendIRdata(12);
}while
(1);
}
//定时器0中断处理
voidtimeint(void)interrupt1
{
TH0=0xFF;
TL0=0xE6;//设定时值为38K也就是每隔26us中断一次
count++;
if(flag==1)
{OP=~OP;}//如果是待发送的有效数据flag=1,就在此产生载波(亮灭交变)
else
{OP=0;}
P3_4=OP;
}
voidSendIRdata(charp_irdata)//发送数据子函数
{
inti;
charirdata=p_irdata;
/***************************************************************/
//发送9ms的起始码,并是载波模式有效
endcount=223;
flag=1;
count=0;
while(count //发送4.5ms的结果码,并是载波模式无效 endcount=117 flag=0; count=0; do{}while(count /***************************************************************/ //发送十六位地址的前八位 irdata=iraddr1; for(i=0;i<8;i++) {//一个周期里规定先以高电平开始,在以低电平结束。 先发送0.56ms的38KHZ“1”的红外波(即编码中0.56ms的高电平) endcount=10; flag=1; count=0; do{}while(count //停止发送红外信号(即编码中的低电平) if(irdata-(irdata/2)*2) //判断二进制数个位为1还是0 {endcount=41;} //1为宽的高电平1.68ms else {endcount=15; } //0为窄的高电平0.56ms flag=0; count=0; while(count irdata=irdata>>1;//依次取位 } //发送十六位地址的后八位 irdata=iraddr2;//此处已经是地址的反码 for(i=0;i<8;i++) { endcount=10; flag=1; count=0; while(count if(irdata-(irdata/2)*2) {endcount=41;} else {endcount=15;} flag=0; count=0; do{}while(count irdata=irdata>>1; } /***************************************************************/ //发送八位数据 irdata=p_irdata; for(i=0;i<8;i++) { endcount=10; flag=1; count=0; while(count if(irdata-(irdata/2)*2) {endcount=41;} else {endcount=15;} flag=0; count=0; do{}while(count irdata=irdata>>1; } //发送八位数据的反码 irdata=~p_irdata;//要将数据位取反 for(i=0;i<8;i++) { endcount=10; flag=1; count=0; while(count if(irdata-(irdata/2)*2) {endcount=41;} else {endcount=15;} flag=0; count=0; while(count irdata=irdata>>1; } endcount=10; flag=1; count=0; do{}while(count flag=0; } voiddelay() { inti,j; for(i=0;i<400;i++) { for(j=0;j<100;j++) { } } } 一串完整的编码如下图所示 前导码地址码地址反码操作码操作反码 2.红外接收部分: 红外接收完成对红外信号的接收、放大、检波、整形,并解调出遥控编码脉冲。 为了减少干扰,采用的是价格便宜性能可靠的一体化红外接收头(HS0038,它接收红外信号频率为38kHz,周期约26us)接收红外信号,它同时对信号进行放大、检波、整形得到TTL电平的编码信号,再送给单片机,经单片机解码并执行去控制相关对象。 接收部分的电路拟图为: HS0038的典型应用电路为: 其应用程序为: #include"reg52.h" #defineucharunsignedchar #defineuintunsignedint #include"reg52.h" #defineucharunsignedchar #defineuintunsignedint ucharram[4]={0,0,0,0};//存放接受到的4个数据地址码16位+按键码8位+按键码取反的8位 voiddelaytime(uinttime)//延迟90uS {uchara,b; for(a=time;a>0;a--) {for(b=40;b>0;b--);} } voidrem()interrupt0//中断函数 { ucharramc=0;//定义接收了4个字节的变量 ucharcount=0;//定义现在接收第几位变量 uinti=0;//此处变量用来在下面配合连续监测9MS内是否有高电平 prem=1; for(i=0;i<1100;i++)//以下FOR语句执行时间为8MS左右 { if(prem)//进入遥控接收程序首先进入引导码的前半部判断,即: 是否有9MS左右的低电平 return;//引导码错误则退出,注意与break语句的区别 } while(prem! =1);//等待引导码的后半部4.5MS高电平开始的到来。 delaytime(50);//延时大于4.5MS时间,跨过引导码的后半部分,来到真正遥控数据32位中 //第一位数据的0.56MS开始脉冲 for(ramc=0;ramc<4;ramc++)//循环4次接收4个字节 {for(count=0;count<8;count++)//循环8次接收8位(一个字节) { while(prem! =1);//开始判断现在接收到的数据是0或者1,首先在这行本句话时, //保已经进入数据的0.56MS低电平阶段 //等待本次接受数据的高电平的到来。 delaytime(9);//高电平到来后,数据0高电平最多延续0.56MS,而数据1,高电平可延续1.66MS大于0.8MS后我们可以再判断遥控接收脚的电平。 if(prem)//如果这时高电平仍然在继续那么接收到的数据是1的编码 {ram[ramc]=(ram[ramc]<<1)+1;//将目前接收到的数据位1放到对应的字节中 delaytime(11);//如果本次接受到的数据是1,那么要继续延迟1MS,这样才能跨 //下个位编码的低电平中(即是开始的0.56MS中) } else//否则目前接收到的是数据0的编码 ram[ramc]=ram[ramc]<<1;//将目前接收到的数据位0放到对应的字节中 }//本次接收结束,进行下次位接收,此接收动作进行32次,正好完成4个字节的接收 } if(ram[2]! =(~(ram[3]&0x7f)))//本次接收码的判断 {for(i=0;i<4;i++)//没有此对应关系则表明接收失败,清除接受到的数据 ram[i]=0; returned;} main() { IT0=1;//设定INT0为边沿触发 EX0=1;//打开外部中断0 EA=1;//全局中断开关打开 while (1) { switch(dis_num) { case0x81: num=0;break; case0xcf: num=1;break; case0x92: num=2;break; case0x86: num=3;break; case0xcc: num=4;break; case0xa4: num=5;break; case0xa0: num=6;break; case0x8f: num=7;break; case0x80: num=8;break; case0x84: num=9;break; case0x88: num=10;break; case0xe0: num=11;break; case0xb1: num=12;break; case0xc2: num=13;break; case0xb0: num=14;break; case0xb8: num=15;break; } P2=table[num]; P1=0x01; delaytime(5); } }


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 基于 51 单片机 控制 红外 通信
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 1212中级汽车维修工考试试题三.docx
1212中级汽车维修工考试试题三.docx
-
333教育综合.docx
-
204届毕业生基础知识考试试题 混凝土结构设计 试题.docx
-
100以内加减运算练习题.docx
-
101软件开发工程师JAVA初级考试样卷课件word版本.docx
-
CNN代码理解.docx
-
CPA审计第4章审计抽样下载版讲解.docx
-
hr培训管理系统.docx
-
318安通科科长岗位责任制.docx
-
2044施工现场环境污染的防治措施.docx
-
12371党务平台操作手册.docx
-
Catia百格线生成宏复习过程.docx
-
725kV及以上电压等级支柱瓷绝缘子运行规范.docx
-
1144甑底链板机说明书.docx
-
100个著名初等数学问题.docx
-
201X中学寒假工作计划范文.docx
-
111 生物的特征 练习 人教版七年级上册生物.docx
-
110KV变电所设计变压器翻译.docx
-
9920第二学期学校工作总结.docx
-
0911二级技能解答.docx
-
33415设计说明书正文.docx
-
311教育学基础综合大纲.docx
-
201浙江普通高校招生选考科目考试地理试题和答案解析.docx
-
C语言程序的设计实验实验指导书及答案.docx
-
272相似三角形的性质和判定.docx
-
ACCAHA不稳定型心绞痛和非ST段抬高心肌梗死治疗指南修订版摘要.docx
-
baosteel标准对照 外标含量.docx
-
M1模拟练习题.docx
-
ARM体系课程设计实验报告.docx
-
Android面试题整理.docx
-
gaoer.docx
-
CPⅢ测设方案.docx
-
2020年村党支部贯彻落实县委巡察组反馈意见整改情况报告和加强改进民族工作专题班子成员个人对照检查材料合编Word格式文档下载.docx
-
某组织部长2020-——2021年生活会围绕“五个方面”个人对照检查情况报告Word版文Word文件下载.docx
-
党员干部2020年度生活会“五个方面”个人对照检查材料Word版文Word下载.docx
-
2020年党史新中国史知识竞赛题填空题80题汇编附全答案Word下载.docx
-
2020年团市委党支部党建工作述职报告和某村支部书记述职报告合编Word格式.docx
-
专题生活会个人对照检查材料和2020年民主生活会个人对照发言材料合编Word下载.docx
-
最新整理初中常见关联词Word下载.doc
-
2020年述职述廉会领导点评讲话稿和市委书记在基层党建工作重点任务推进会讲话稿合编Word格式.docx
-
2020年入党积极分子党校学习思想汇报三份Word文档格式.docx
-
最新部编版八年级语文下册期末复习资料全套Word文档格式.docx
-
2020年全面建设现代化社会主义国家研讨发言稿和任职表态发言稿合编Word格式文档下载.docx
-
2020年市工信局机关党委书记党建工作述职报告和抓党建工作落实情况述职报告合编Word格式.docx
-
2021年某市城管局局长在新机构成立大会讲话文和在干部任前集体廉政谈话会讲话文合编Word文档格式.docx
-
2020年喜迎建党99周年党课讲稿1770字范文Word格式.docx
-
2021年制止餐饮浪费行为专题组织生活会剖析发言稿和乡镇干部“以案促改”个人对照检查材料合编文档格式.docx
-
2020年全市脱贫攻坚问题整改推进会主持词及总结讲话稿和“力戒形式主义官僚主义”学习交流发言材料合编Word格式文档下载.docx
-
全国2011年1月高等教育自学考试概率论与数理统计(经管类)试题Word文档格式.doc
-
关于印发《2011年建筑安全专项整治工作方案》的通知发展与协调Word下载.doc
-
公共关系学形考01--04任务答案Word文档下载推荐.docx
