 二维机械滑台设计指导书草稿.docx
二维机械滑台设计指导书草稿.docx
- 文档编号:9157305
- 上传时间:2023-02-03
- 格式:DOCX
- 页数:30
- 大小:681.45KB
二维机械滑台设计指导书草稿.docx
《二维机械滑台设计指导书草稿.docx》由会员分享,可在线阅读,更多相关《二维机械滑台设计指导书草稿.docx(30页珍藏版)》请在冰豆网上搜索。
二维机械滑台设计指导书草稿
高精度二维机械滑台
一、设计任务
1、两坐标行程为250mm;
2、定位精度土0.01mm
3、响应速度》1.5m/sA2;
4、最高速度12m/min,最低速度1m/min。
二、设计工作
1、运动设计
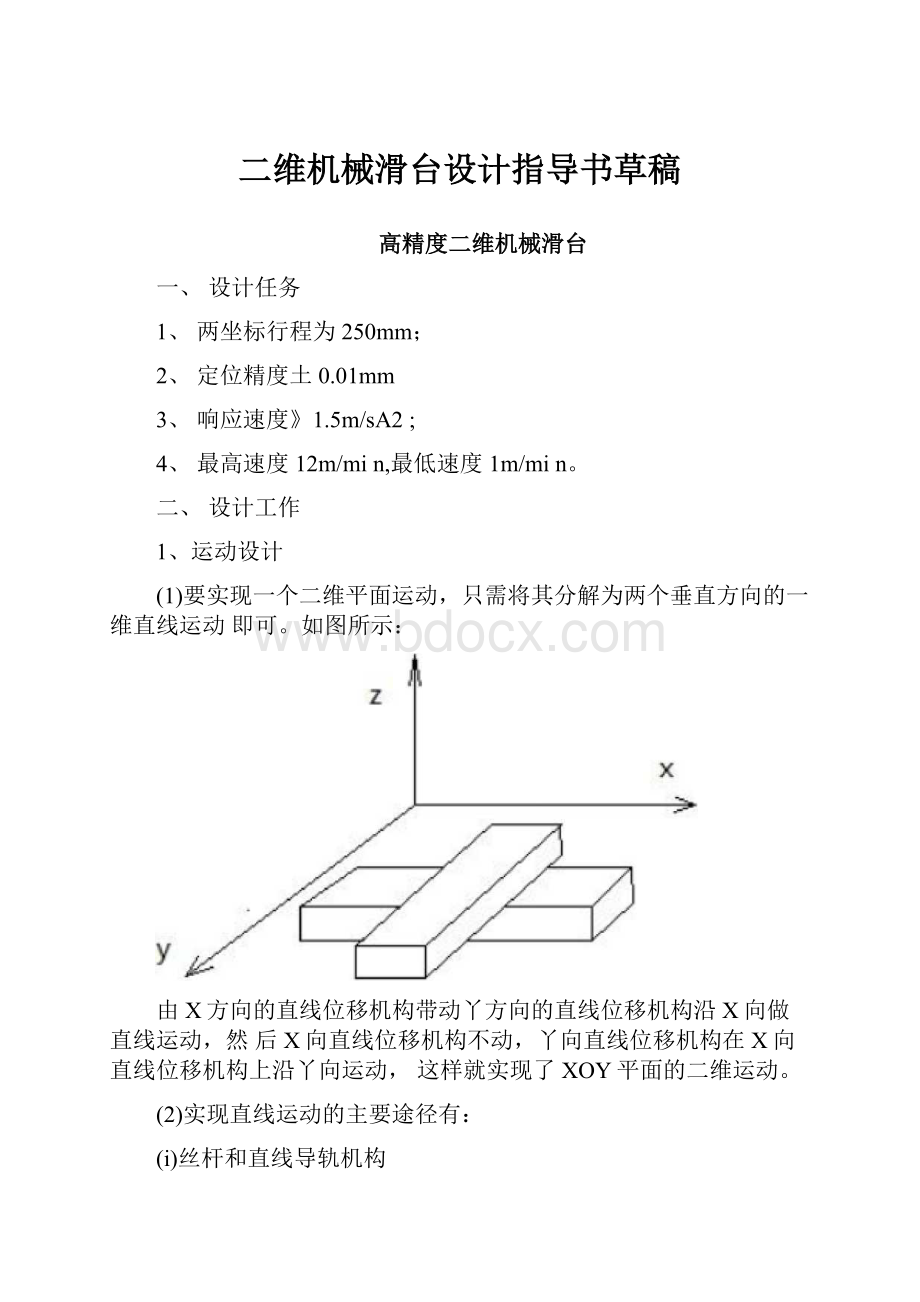
(1)要实现一个二维平面运动,只需将其分解为两个垂直方向的一维直线运动即可。
如图所示:
由X方向的直线位移机构带动丫方向的直线位移机构沿X向做直线运动,然后X向直线位移机构不动,丫向直线位移机构在X向直线位移机构上沿丫向运动,这样就实现了XOY平面的二维运动。
(2)实现直线运动的主要途径有:
(i)丝杆和直线导轨机构
(ii)直线电机
(iii)齿轮齿条机构
(iv)曲柄滑块机构等方法等四种方法。
评分标准(
10分制)
01
2
3
45
6
7
89
10
不可差
较差
勉强
可用中
良
较好
好优
理想
用
可用
各机构的评价分值表
性能指标
定位精度
运动速度
承载能力
效率
经济性
行程
总分
丝杆和直
9
9
8
10
7
9
52
线导轨机
构
直线电机
8
8
7
8
7
9
47
齿轮齿条
5
6
9
5
8
6
39
机构
644
从上图可以看出,第一种方法丝杆与直线导轨机构较符合
(3)总体设计方案图:
根据前文进行的运动设计,初步拟定用步进电机驱动滚珠丝杆,带动滚动导轨上工作做直线运动,采用开环控制系统进行点位控制,由脉冲数控制位移、脉冲频率控制工作台速度的方案。
2、传动设计
机床传动系统是实现机床运动的。
下图是各种传动类型的比较:
传动类型
传动效率
传动比
圆周速度
lmsA
外廓尺
寸
相对成
本
性能特点
带传动
0.94〜
0.96(平带)0.92〜0.97(V带)
w5〜7
5〜25(30)
大
低
过载打滑,传动平稳,能缓冲吸振,
不能保证定传动
比,远距离传动
0.95〜
0.98(齿型带)
<10
50(80)
中
低
传动平稳,能保证
固定传动比
链传动
0.90〜
0.92(开
式)0.96〜
0.97(闭式)
<5(8)
5〜25
大
中
平均传动比准确,可在高温下传动,远距离传动,高速有冲击振动
齿轮传动
0.920.96(开式)0.96〜0.99(闭式)
w3〜5(开式)w7〜
10(闭式)
w5w200
中小
中
传动比恒定,功率和速度适用范围广,效率高,寿命长。
蜗轮传动
0.40〜
0.45(自
锁)0.7〜
0.9(不自锁)
8〜80
(1000)
15〜50
小
高
传动比大,传动平稳,结构紧凑,可实现自锁,效率低
螺旋传动
0.3〜0.6(滑
动)<0.9(滚
动)
高中低
小
中
传动平稳,能自锁,
增力效果好
连杆传动
高
1
中
小
低
结构简单,易制造,能传递较大载荷,耐冲击,可远距离传动
凸轮传动
低
中低
小
高
从动件可实现各种
运动规律,高副接
触磨损较大
摩擦轮传
动
0.85〜0.95
<5〜7
<15〜25
大
低
过载打滑,工作平稳,可在运转中调节传动比
依据经验,初步选择导程为5mm勺丝杆。
根据定位精度要求确定脉冲当量为
0.005mm/Hz,步距角选取0.36度。
结合式(2.1),计算得传动比为1。
(2.1)
360iPB
式中:
「为步进电机步距角;
为脉冲当量;
i为传动比;
Pb为丝杆导程。
由于计算得传动比为1,则不需要选用减速箱,直接采用联轴器连接电动机轴与丝杆。
3、驱动设计
驱动系统:
为机械系统正常工作提供动力源、实现能量转换的原动机(或动力机)及其配套装置。
大多数原动机采用电动机。
按利用的能源分,有热力发动机、
水力发动机、风力发动机和电动机等。
3.1常用原动机的类型:
1)电动机2)液压马达3)气动马达4)内燃机
电动机:
技术较为成熟,驱动效率高,与被驱动的工作机械连接简便(可用标准联轴器);有多品种和规格,可满足不同类型机械的工作要求;具有良好的调速性能,启动、制动、反向和调速的控制简单可靠,可以实现远距离的测量和控制,便于集中管理和实现生产过程的自动化。
价格较低。
液压马达:
可以获得很大的机械力或转矩,与电动机相比在相同功率时其外形尺寸小、重量轻,因而运动件的惯性小,快速响应的灵敏度高。
但是使用液压马达必须具有高压油的供给系统,且对液压元件的制造和装配精度要求较高,容易出现漏油现象而影响工作效率及工作机械的运动精度。
价格咼。
气压马达:
使用空气作为工作介质,容易获得;用后可以直接排入大气而无污染,压缩空气可以进行集中供给和远距离输送;动作迅速,反应快,维护简单,成本低;对易燃、易爆、多尘和振动等恶劣工作环境的适应性较好。
但是因空气具有可压缩性,气动马达的工作稳定性较差,气动系统的噪声大;工作压力受到一定的限制不能太高,输出的转矩不能太大,一般只适用于小型和轻型的工作机械。
内燃机:
功率范围宽,操作简单,启动迅速,便于移动,用于野外,无法使用电力的时候使用。
污染环境,消耗自然资源。
3.2考虑到定位精度要求不高,载荷不大,为简化结构,降低成本,提高性价比,因此该设计中采用步进电机的开环系统驱动。
经计算,X、丫方向步进电机均可选选常州宝马前杨电机电器有限公司的90BF006型反应式步进电机。
90BF006的主要技术参数
表3.1
型号
相数
步距角
(Deg)
电压
(V)
电流
(A)
保持转矩(Nn)
空转起
动频率
(HZ)
运行频率(Hz)
质量
(Kg)
90BF006
5
0.36/0.72
24
3
2.156
2400
2.2
90BF006的矩频特性曲线
(Ez)UJnoHO-L
PULESRATE(H^)
90BF006
90BF006的接线图
红长红頂
AA
步进电机的接线方式有两种:
串联和并联如下图的四相八线接法:
步进电机外形:
4、机床部件设计
4.1联轴器、轴承
联轴器有刚性和挠性两种,刚性联轴器适用于两轴严格对中不发生相对位移的地方。
挠性联轴器适用于两轴有偏斜(可分为同轴线、相交轴线)或在工作中有相对位移(可分为轴向位移、径向位移、角位移、综合位移)的地方。
挠性联轴器又有无弹性元件的、金属弹性元件的和非金属弹性元件的之分。
后两种称为弹性联轴器。
二维工作平台是高精度机电系统,要求定位精度高,启动灵活、频繁。
这就要求联轴器输出地角位移、转矩与电机输出地角位移、转矩同步性好,因此选择刚性联轴器。
轴承分滑动轴承和滚动轴承。
由于工作台载荷不大,速度低,步进电机启动频繁,这里设计选择滚动轴承。
4.2导轨
直线运动导轨的作用是用来支承和引导运动部件按给定的方向作往复直线运动。
导轨部件由运动导轨(动导轨)和支承导轨(静导轨)组成。
按摩擦性质,导轨可分为滑动摩擦导轨、滚动摩擦导轨、弹性摩擦导轨、流体摩擦导轨等四类。
表3.3中给出了给出了各类导轨的对比。
各类导轨的比对
表3.3
导轨名称
导向精度
运动平稳性
承载能力
耐磨性
使用环境
成本
滑动导轨
较咼
较好
大
差
要求不咼
低
滚动导轨
咼
较好
较低
较好
要求较咼
较咼
液压静压导轨
高
好
较大
好
要求高
高
空气静压导轨
高
好
较低
好
要求高
高
根据设计要求,需要承受的载荷不大,定位精度高,因此在该设计中选用直线滚动导轨。
直线滚动导轨具有摩擦系数小,不易爬行,传动效率高,结构紧,安装预紧方便等特点。
经计算,结合上银科技股份有限公司MGF系列导轨的标准长度和轨长公式,选用其MGN12型号产品。
4.3丝杆
电动机的旋转运动需要通过丝杆螺旋传动转换成直线运动
⑵螺母转动,丝杠移动;
⑶螺母固定,丝杠转动、移动;
⑷丝杠固定,螺母转动、移动;
(5)丝杆、螺母同是转动一一螺母移动;图:
机床设计手册2,P424
(6)丝杆转动一一丝杆及螺母2移动;图:
机床设计手册2,P424
对于卧式工作台我们选择第一种方案,即丝杠转动,螺母移动。
4.3.2按摩擦性质
可分为滑动螺旋传动和滚动螺旋传动两种。
滑动丝杠螺母机构具有结构简单,运动平稳,传动精度高,螺纹导程小,降速比大,牵引力大等优点。
其缺点是摩擦阻力大,传动效率低,螺纹中有侧向间隙,故反向有空行程。
由于动静摩擦差别大,低速时可能出现爬行现象。
滚珠丝杠就具有螺旋滚道的丝杠和螺母间充满滚珠。
这些滚珠作为中间传动件,在螺母闭合的回路中循环滚动,使丝杠螺母副的运动由滑动变成滚动,以减小摩擦。
滚珠丝杠的传动效率很高,当双螺母预紧后,轴向刚度好,传动副爬行小,具有较高的定位精度,启动转矩小,传动灵敏,同步性好。
故选用滚珠丝杆副。
433常见的滚动丝杠支承方式有四种:
1、“固定一固定”型:
K2=4
适用于高转速、高精度的场合。
该形式两端分别分别由一对轴承约束轴向和径向自由度,负荷由两组轴承副共同承担。
也可以使两端的轴承副承受反向预
拉伸力,从而提高传动刚度。
在定位要求很高的场合,甚至可以根据受力情况和
丝杠热变形趋势精确设定目标行程补偿量,进一步提高定位精度。
“固定一固定”型有时也被片面地叫做“双推一双推”,实际上由于径向力的存在几乎很少能用两个推力轴承作为固定端。
由于此形式结构较复杂,调整较难,因此一般仅在定位要求很高时采用。
2、“固定一游动”型:
K2=2
适用于中转速、高精度的场合。
该形式一端由一对轴承约束轴向和径向自由度,另一端由单个轴承约束径向自由度,负荷由一对轴承副承担,游动的单个轴承能防止悬臂挠度,并消化由热变形产生的应力。
“固定一游动”型有时也被
片面地叫做“双推-支承”。
此形式结构较简单,效果良好,应用广泛。
3、“支承一支承”型:
K2=1
适用于中转速,中精度的场合。
该形式两端分别设一个轴承,分别承受径向力和单方向的轴向力,随负荷方向的变化,分别由两个轴承单独承担某一方向
的力。
由于支承点随受力方向变化,定位可控性较低。
此形式结构简单,受力情况较差,应用较少。
4、“固定一自由”型:
K2=0.25
适用于低转速,中精度,轴向长度短的场合。
该形式一端由一对轴承约束轴
向和径向自由度,另一端悬空呈自由状态,负荷均由同一对轴承副承担,并且
需克服丝杠回转离心力(及水平安装时的重力)造成的弯矩。
“固定一自由”型
有时也被错误地叫做“双推-自由”。
此形式结构简单,受力情况差,但在行程小、转速低时也经常用到。
比较四种支承方式,这里选择第二种成对轴承安装方式有三种:
(精密机械设计基础P249)
(1)
(1)面对面
(2)背对背
(3)串联
此种安装方式适用于较高精度及中等载荷的丝杆,一端采用深沟球轴承,一端采用一对背对背角接触球轴承,这样能够承受集中力偶,且支承端的轴向自由度可以释放因工作时温度升高而产生的轴伸量。
If—
1ij"J
o
h
4.4支承件
支承件是设备的基础构件,包括床身、横梁、摇臂、底座、刀架、工作台、箱体和升降台等。
这些件一般都比较大,所以也称大件。
4.4.1支承件的种类
按构造方式可分为:
A.机座类B.箱壳类C.机架类D.平板类
按结构可分为:
A.整体式B.装配式
4.4.2典型车床类床身(金属切削机床设计P147)
a)典型车床类床身
b)镗床、龙门刨床等机床的床身
c)大型和重型机床的床身
443提高刚度
合理配置加强筋是提高局部刚度的有效方法(金属切削机床设计
/%
「\
VI
[71
pv'羽0
J丄
1>
1>
(a)it时m
DODOOC
===|i丁了__1_..—
佃難騒(e)綽跡(f)井字稿
85,5加
4.4.4支承件的材料
结构工艺类别
材料
*产方滋
周期
经济性原则
市场
适应性
生产规模
产品类型
产品精度
诗造结构
灰特铁
京造工艺
长
大仲批it
中、小型
普通、精密
一般
焊接结构
制板与
烬接工艺
j短
单件.小枇
大冲型
精职高精度
好
复合结构
钢与铸铁
金属与金属
钢点与混凝上、坏氧树
综合工艺
单件、小批
大冲S
咼精度
不好
金属与1菲金購
j
脂混凝
土,花1岗岩1
4.4.5工作台
P136)。
U形槽、燕
工作台最常见的是T形槽。
但是也可在工作面上可加工V形、尾槽、圆孔、长孔等。
1
古
1
(1)工作台与螺母座的联接。
螺母座与工作台有两种连接方式。
一种是刚性连接,是结构体三个力方向都受到约束。
如钢结构中的焊接。
另一种是柔性连接,在结构中叫做铰接,是结构体1~2个力方向受到约束。
刚性连接不允许出现相对位移和转角,也就是说节点不考虑变形问题;柔性连接就是允许相互连接的构件发生位移或转角,不限制某一方面的变形,也就是说允许出现变形,或者说我们希望他能够变形。
刚性连接是焊接、螺栓连接等机械连接;柔性连接是铰接、有弹簧隔振这些的连接。
本设设计采用刚性联接结构,如图4.2所示。
这种联接结构的特点是牢固可靠。
工柞合
nt)[fcr
(2)工作台本身的设计
工作台用以安装工件。
如果工作态是不动的,如摇臂钻床的工作台,可设计成
封闭的箱型。
如果工作台是运动(移动或转动)的,则有一组导轨。
这类工作台的形状有三种(金属切削机床设计P149):
A、箱形升降式,如牛头刨床的工作台;
B、矩形,如铣床、磨床等的工作台;
C、圆形,如立式车床(又称花盘)和齿轮加工机床的工作台
本设计的工作台是运动的。
(3)工作台筋条的布置对抗弯刚度的影响。
(机床零件设计2下P1290表5,15-74)
(1)工作平台功能。
按用途分为:
检验平板:
适用于各种检验工作,精密测量用的基准平面;用于机床机械检验测量基准;检查零件的尺寸精度或形为偏差,并作紧密划线,在机械制造中也是不呆缺少的基本工具。
划线平板:
用于机械、发动机的动力实验,设备调试,具有较好的平面稳定性和韧性,表面带有T型槽,可以用来固定实验设备。
镗铣床平板:
主要用于机床加工工作平面使用,上面有孔和T型槽,用来固定工件,和清理加工时产生的铁屑。
焊接平板:
用来进行工件的焊接工艺,和铆焊平板不同,上面没有孔,工作面为平面或T型槽。
铆焊平台:
用于铆焊工艺的基础平板,工作面上有孔和T型槽,孔主要用来清理铆焊时的一些铁渣和焊接废弃物,T型槽主要是用来固定焊接件。
测量平板、装配平板、基础平板、工作平板、三坐标平板等。
是检验机械零件平面、平行度、直线度等形位公差的测量基础,亦要用于一般零件精密零件的划线、研磨工艺和测量等。
在工作台中设计的T形槽不仅可以节约材料,而且还加强了工作台的强度。
规格(长>宽)
精度等级
0级
1级
2级
3级
平面度公差
200X200
5
10
20.5
200X300
5.5
11
22
300X300
5.5
11
22
300X400
6
12
24
400X400
6.5
12.5
25
400X500
6.5
13
26
66
400X600
7
14
27.5
70
500X500
6.8
14
28
68
500X600
7
14.2
28.5
71
500X800
8
15.5
31
78
600X800
8
16
32
80
600X900
8.3
16.5
33
83
1000X750
9
18
36
90
1000X1000
20
40
97
1000X1200
20.5
41
103
1000X1500
22
45
112
1000X2000
26
52
130
1500X2000
28
56
140
1500X3000
70
174
2000X3000
74
184
2000X4000
88
219
5.控制系统5.1控制系统的选择
伺服系统分为以下几类:
1开环伺服系统
系统只是根据输入量和干扰量进行控制,而输出端和输入端之间不存在反馈回路,输出量取决于精密机械系统,而与控制系统无关。
2闭环伺服系统
系统的输出端和输入端之间存在反馈回路,在被控对象的运动过程中,测量环节不断测出实际的输出量并与给定量进行比较,然后用其差值进行控制,以获取高精度。
闭环伺服系统的设计、制造和调整都较复杂,通常适用于高精度的精密机械系统。
3半闭环伺服系统
半闭环伺服系统介于闭环系统和开环系统之间,用于精度要求不太高的情况下。
检测装置不是安放在工作台上,而是装在丝杆或电机轴的端部。
由于半闭环伺服系统比闭环伺服系统的环路短,因此较易获得稳定控制。
在本设计中,只涉及到通过步进电机驱动,丝杆传动的直线运动。
考虑到该设计的二维坐标机械滑台的定位精度要求不高,载荷不大,因此,为简化结构,降低成本,提高性价比,该设计中采用步进电机的开环伺服系统驱动。
图4.1开环伺服系统
工作台
4.2行程控制
行程控制,就是当运动部件到达一定行程位置时采用行程开关来进行控制。
行程开关是由装在运动部件上的挡块来撞动的。
行程开关作用有两个:
(1)防止工作台超过最大行程,使电机损坏。
(2)可以用与定位。
所以这4个行程开关就充当了传感器。
图4.2行程开关工作示意图
图4.2是行程开关工作的简单示意图。
行程开关S1和S2分别装在导轨的起点和终点,由装在工作台上的挡块来撞动。
工作台由步进电机带动。
工作台在起点时,其上挡块将起点行程开关S1压下,将串接在反转控制电
路中的常闭触头压开。
这时电动机不能反转。
电动机正转,带动工作台前进。
当工作台到达终点时,挡块压下行程开关S2,将串接在正转控制电路中的常开触
头压开,电动机即停止正转。
参考文献:
[1]《机械工程手册》•机械零部件设计,机械工业出版社,[M],1997
年.P1-12~P1-18,P6-3~P6-32,P7-6~P7-9,P8-5~P8-52,P9-21~P9-52.
[2]《机床设计手册》•2上,机械工业出版社,[M],1980年8
月.P424~P425,P457~P464.
[3]《机械设计》,许国忠、周玉林主编,中国标准出版社,[M],2009年8月.P1~P5.
[4]《精密机械设计基础》,天津大学裘祖荣主编,机械工业出版社,[M],2008年3月
⑸《金属切削机床设计》,大连工学院戴曙主编,机械工业出版社,[M],1989年11月
四、计算:
本设计中,下层X方向的负荷为10Kg,而上层丫方向负荷仅6Kg。
1■伺服电机的计算和选型
1.1根据定位精度要求确定脉冲当量选择步距角
根据经验,初步选择导程为5mm勺丝杆;本系统中X、丫方向的定位精度均
为土0.01mm因此X、丫方向的脉冲当量均取6=0.005mm/Hz
:
•为步进电机步距角为0.36°;、:
为脉冲当量为0.005mm/hz;i为传动比;
6x360.d
i=1
iPB
1.2根据快速进给速度,确定电机的最高运行频率
Vmax为工作台运行最高速度(m/min);fmax为步进电机最高运行频率(Hz)。
代入工作台最快进给速度12m/min、脉冲当量0.005mm/Hz,计算得fmax=40000Hz=
1.3根据负载转矩或阻力,选择步进电机转矩
T=Ta+T|,T为电动机转矩(Nn);
Ta为惯性加速转矩(Nm;
Ti为摩擦负载转矩(Nm。
1.3.1计算Ta
(1)Y轴方向上步进电机总转动惯量的计算
i)、工作台与负载的惯量:
IM''Pbi2|
J^M五!
JA为工作台与负载的惯量;
M为工作台与负载的总质量(Kg),初取6Kg。
ii)、滚珠丝杆惯量:
JbbLbDb4,式中:
Jb为滚珠丝杆的惯量;
32
:
?
B为滚珠丝杆的密度,7.90g;cm3;
Lb为滚珠丝杆总长,368mm
Db为滚珠丝杆外径,20mm
折算到步进电机轴上的总惯量为:
J^JAJB
(2)X轴方向上步进电机总转动惯量的计算
X方向导轨上移动部件的重量估算,M=1OK®得X方向折算到步进电机轴上
FF
的总惯量为:
Jx=JaJb
Ta=J(fnf0)式中:
f0、fn为加速开始及终止时的脉冲频率(HZ),
57.3t,
t为加速过程时间(s),=0.133s(其中a是加速度1.5ms2)o
已知fn=40OOOHz,取fo=2000Hz,XY方向惯性加速转矩分别为:
fn-f0)
a
)Tay=Jy(
y57.3t
36、*(mFz)
2二匚
1.3.2计算Ti
式中:
m为工作台及负载质量(Kg);
'■为摩擦系数,取0.2;
Fz为垂直方向的切削分力,此处为0N;
为驱动系统的效率,取0.80o
Tl
10,
由此可计算XY方向的R、maxo
T
2■导轨
两个方向上均采用双导轨、四滑块的支承形式。
2.1静负荷
考虑最差的情况,即垂直于工作台面的工作载荷全部由一个滑块承担,则单滑块需承受的最大垂直方向载荷为:
Fmax二mg二109.8=98n
C°=PfsL
式中:
C0为基本静额定负荷(N);
P为工作负荷(N);
fSL为静安全系数,此处取2.0o
2.2额定寿命
假定工作台的工作寿命为5年,一年工作300天,每天工作6小时。
因此,得到滚珠直线导轨的小时工作寿命为:
Lh=5X300X6=9000小时
_LI03
Lh
2nl60
1为行程(m)o
2.3动负荷
3
50km,C=273N
滚珠直


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 二维 机械 设计 指导书 草稿
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《Java程序设计》考试大纲及样题试行.docx
《Java程序设计》考试大纲及样题试行.docx
-
《工业企业管理》自学任务书.docx
-
《短歌行》原文翻译及赏析.docx
-
《跳水》教案3.docx
-
《基于MATLAB的信号与系统实验指导》编程练习.docx
-
《你是最棒的》教学设计.docx
-
《选修4化学反应原理》知识点总结整理超全.docx
-
2环境应急监测试题资料.docx
-
《自动化仪表工程施工及验收规范》GB50093仪表安装检验批.docx
-
09年法律硕士民法预热辅导第2102讲完整篇doc.docx
-
6阅读能力阅读方法指什么.docx
-
《豆蔻镇的居民和强盗》读后感.docx
-
CMYK色值参考.docx
-
3121护理查对制度.docx
-
《草莓》课堂教学课件5篇.docx
-
CCNA完整知识点.docx
-
《合理安排时间》说课稿.docx
-
18我的伯父鲁迅先生.docx
-
3dmax授课计划doc.docx
-
《中共中央国务院关于加快推进生态文明建设的意见》.docx
-
《永生的眼睛》练习题附答案.docx
-
flow3d官方培训教程中的实例中文说明.docx
-
《宪法》《监察法》应知应会100题含答案.docx
-
EMS基础知识综合练习复习资料.docx
-
100以内退位减法500道带竖式空间可直接打印.docx
-
207声屏障施工组织设计.docx
-
30个科学小常识教学提纲.docx
-
JGJ59建筑施工安全检查标准评分表全套.docx
-
12幼儿园保育员培训活动记录表.docx
-
minecraft匠魂教程.docx
-
c语言课程设计学生成绩管理系统.docx
-
0503新闻传播学基本要求.docx
-
人教版八年级物理下册第二章运动和力考试题.docx
-
数据库实训+邮局订报管理系统.docx
-
双十一三只松鼠营销策划方案 双十一零食促销策划方案.docx
-
人教版生物八年级下册总复习.docx
-
水库除险加固工程设计投标文件.docx
-
人教版小学四年级语文知识点归纳总结.docx
-
说课稿结尾.docx
-
人教版一年级解决问题100道.docx
-
思想汇报汇总.docx
-
人力资源管理专业大学生职业生涯规划书范文格式.docx
-
四年级上册劳技教案.docx
-
人体解剖学神经系统习题题库.docx
-
苏霍姆林斯基选集名著读书心得.docx
-
仁爱英语七年级下导学案Unit5Topic2.docx
-
苏教版五上语文答案.docx
-
软件工程项目管理计划书完整版.docx
-
苏亚星多媒体教学网软件 用户手册.docx
-
软考信息处理员机考excel部分.docx
-
算法和程序设计分析报告及精彩试题附问题详解08算法和程序设计.docx
