 6RA70主从控制的应用.docx
6RA70主从控制的应用.docx
- 文档编号:9029674
- 上传时间:2023-02-02
- 格式:DOCX
- 页数:10
- 大小:498.20KB
6RA70主从控制的应用.docx
《6RA70主从控制的应用.docx》由会员分享,可在线阅读,更多相关《6RA70主从控制的应用.docx(10页珍藏版)》请在冰豆网上搜索。
6RA70主从控制的应用
6RA70主从控制的应用
显示订货号
一.peer-to-peer通讯
首先,介绍以下peer-to-peer通讯:
根据不同的应用形式分为三类:
以X172接口为例:
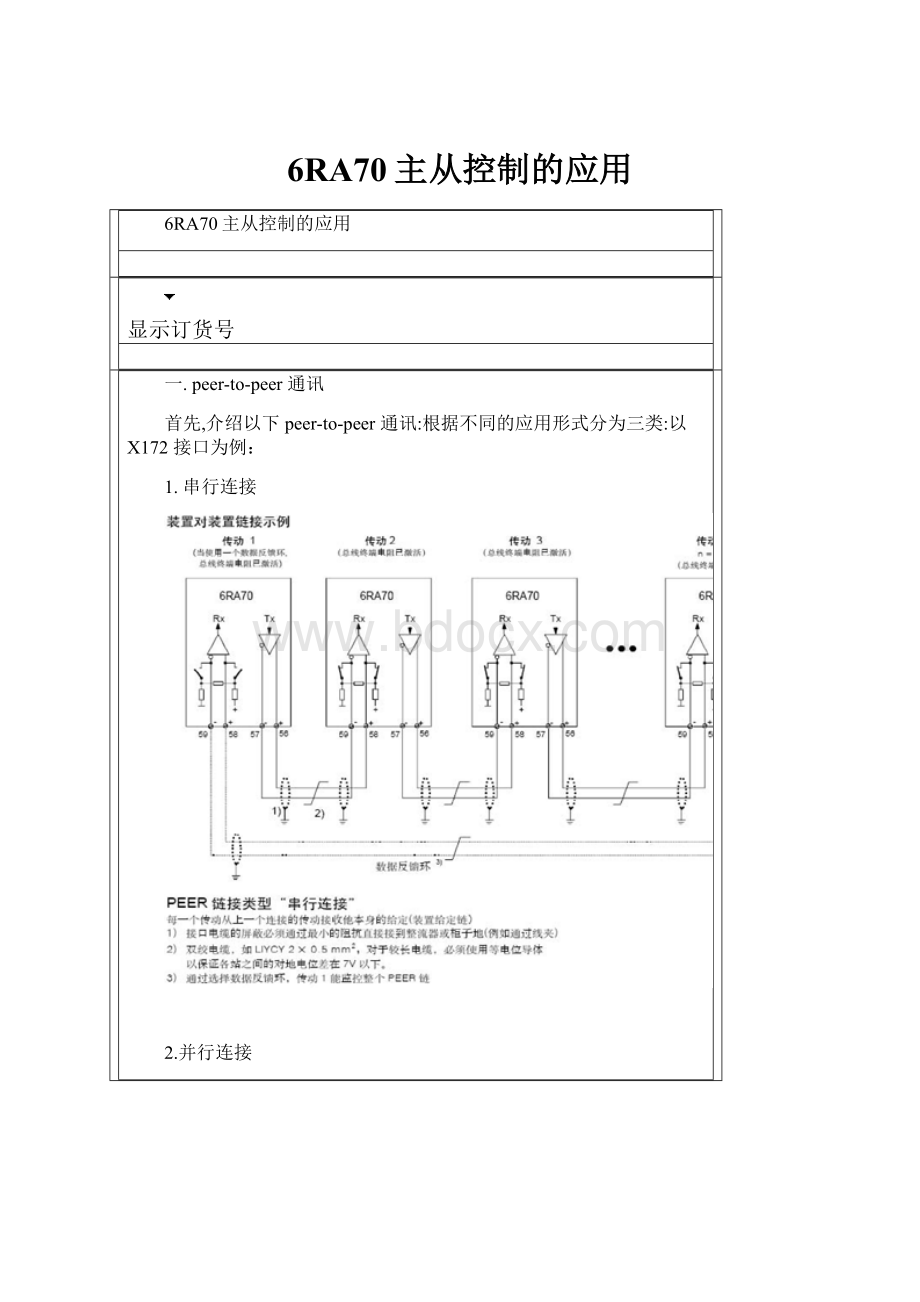
1.串行连接
2.并行连接
3.总线连接
4.参数设置:
二.实际生产应用中,主从控制方式应用分两种形式:
1.电机首尾通过法兰直接硬相连,主动装置工作在速度环工作状态,而从动装置工作在电流环(转矩环)状态,在这种方式中,一般情况下,定义远离减速机的电机作为主动电机,编码器接在主动装置所带的电机上。
从动装置通过peer-to-peer网络接收来自主动装置发送来的电流(转矩)给定,速度实际值和控制字1。
连接简图1:
上图是电机硬轴直接连接的主从控制的控制方式连接简图,主电路连接请参考6RA70手册。
这种方式中,主动装置工作在速度环状态,产生转矩设定值,把这个值通过peer-to-peer网络传递给从动装置,同时,把控制字1也传到从动装置,使得主,从动装置起停操作同时进行。
这时候,从动装置上的端子34,37,38要短接在一起。
实际速度传到从动装置,主要是为了标定励磁曲线。
此时,从动装置的斜坡函数发生器和速度调节器不处于激活状态。
通过这种连接,从动装置与主动装置能一起向前和向后运行。
根据生产工艺要求,在一些场合,工作负载量很小,只需一个电机工作就可以,此时,需把从动装置上的端子34,37和38要用一个开关使其使能取消,同时P082不能设置成3,或把从动装置主电源断掉。
参数设置:
主动装置
从动装置1…n
P081=1 装置弱磁运行
P081=1 装置弱磁运行
P083=2 编码器反馈
P083=4 自由连接的速度反馈
P169=0 转矩控制
P169=0 转矩控制
P170=1 转矩控制
P170=1 转矩控制
P503=xx 电机-装置匹配系数
P171=xx电机-装置匹配系数
P500=6002 来自主动装置的转矩设定点
P609=6001来自主动装置的速度实际值
P648=6003 来自主动装置的控制字
P687=1 设置从动开关
P790=5 装置对装置通讯
P790=5 装置对装置通讯
P791=3 发送字数量
P791=3 发送字数量
P793=8 波特率
P793=8 波特率
P794.01=167 实际速度
P794.02=148 转矩设定点
P794.03=30 控制字1
P795=1 终端电阻
P797=2s 报文监控时间
P797=2s 报文监控时间
以上参数只是关于主从控制方面的设置,关于启动参见6RA70手册的第7.5节的启动步骤.。
关于优化运行步骤:
(1)主动装置的优化运行
a.打开电机和减速机之间的连接,
b.在从动装置上设定P171=0P172=0
c.执行P051=25优化
d.执行P051=26优化,必要时,进行手动优化,达到使输出转速平稳,为弱磁优化做准备
e.执行P051=27优化
f.在从动装置上恢复P171,P172的值
(2).从动装置的优化运行
a.把主动装置的P171,P172设置成0
b.执行P051=25优化
c.执行P051=27优化
d.把主动装置的P171P172恢复成原来的值
(3)当把电机与减速机连接以后,要设置P051=26优化运行,调整转速达到平稳。
2.第二种情况是应用于类似印刷行业,与第一种情况基本相同,在这种情况下,电机轴的连接可以自由分开。
根据电机连接轴的连接方式分为下列两种情况:
见下列简图2:
图2
控制模式1
1.电机轴连接在一起即,Ku1闭合
图中G1为主动装置,运行在速度环状态,,G2为从动装置,运行于电流环控制,给定值通过peer-to-peer接收主动装置的转矩给定或电流给定。
在这种情况下,电机轴连接Ku1必须牢固闭合,否则,可能由于失去速度环的控制而产生超速现象。
2.当电机轴分开运行时,即Ku1脱开
此时,主动装置G1与从动装置G2独立工作于速度环控制模式,G1的速度给定通过模拟量(或网络),G2的速度给定通过peer-to-peer,把G1的斜坡发生器的输出给到G2的速度环的给定,同时,把G2的模拟量作为G2的速度补偿量,从而达到G1和G2的同步。
参数设置:
主动装置
从动装置1…n
P081=1 装置弱磁运行
P081=1 装置弱磁运行
P083=2 编码器反馈
P083=2 编码器反馈
P169=0 转矩控制
P169=0 转矩控制
P170=1 转矩控制
P170=1 转矩控制
P503=xx 电机-装置匹配系数
主动电机电流 P171=xx 电机-装置匹配系数
P500=6002 来自主动装置的转矩设定点
P634.01=6001来自主动装置的速度给定值
P634.02=11 速度补偿
P687=10 主从动切换开关
P648=6003 来自主动装置的控制字1
P790=5 装置对装置通讯
P790=5 装置对装置通讯
P791=3 发送字数量
P791=3 发送字数量
P793=8 波特率
P793=8 波特率
P794.01=170 速度设定值
P794.02=148 转矩设定点
P794.03=30 控制字1
P795=1 终端电阻
P797=2s 报文监控时间
P797=2s 报文监控时间
电机的优化运行操作:
把电机连接轴分开,分别对两个电机进行优化操作,详细操作,参考6RA70操作手册第7.5章节。
控制模式2
当两电机轴Ku1牢固连接时,主动装置G1和从动装置G2都工作于速度环控制,G2的速度给定同样来自G1的斜坡函数发生器的输出,但同时,要通过G2的速度补偿给定使G2的速度超前于G1装置5%,使得G2的速度环逐渐趋于饱和。
把G1的速度调节器的输出通过peer-to-peer传送到G2作为转矩限幅,使得G2和G1的输出转矩相等。
如果突然电机连接轴脱开,G2的速度只能增加5%。
此时由于G2的速度环退出饱和状态而按照大于G1的给定的5%运行,不致于超速飞车。
参数设置情况:
主动装置
从动装置1…n
P081=1 装置弱磁运行
P081=1 装置弱磁运行
P083=2 编码器反馈
P083=2 编码器反馈
P169=0 转矩控制
P169=0 转矩控制
P170=1 转矩控制
P170=1 转矩控制
P171=xx 电机-装置匹配系数
P430.01=10 来自主动装置的转矩设定点开关
P430.02=11 速度补偿
P431.01=6002 来自主动装置的转矩设定点
P431.02=2 转矩限幅
P605.01=204 转矩限幅
P606.01=4 打开转矩限幅
P621=15 速度超前设定
P634.01=6001来自主动装置的速度设定点
P634.02=11速度补偿
P648=6003 来自主动装置的控制字1
P706=11 速度补偿开关
P712=5%
P716=10 速度超前补偿开关
P790=5 装置对装置通讯
P790=5 装置对装置通讯
P791=3 发送字数量
P791=3 发送字数量
P793=8 波特率
P793=8 波特率
P794.01=170 速度设定值
P794.02=148 转矩设定点
P794.03=30 控制字1
P795=1 终端电阻
P797=2s 报文监控时间
P797=2s 报文监控时间
电机的优化运行操作:
把电机连接轴分开,分别对两个电机进行优化操作,详细操作,参考6RA70操作手册第7.5章节
关键词
peer-to-peer通讯主从控制转矩限幅


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- RA70 主从 控制 应用
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 1212中级汽车维修工考试试题三.docx
1212中级汽车维修工考试试题三.docx
-
333教育综合.docx
-
204届毕业生基础知识考试试题 混凝土结构设计 试题.docx
-
100以内加减运算练习题.docx
-
101软件开发工程师JAVA初级考试样卷课件word版本.docx
-
CNN代码理解.docx
-
CPA审计第4章审计抽样下载版讲解.docx
-
hr培训管理系统.docx
-
318安通科科长岗位责任制.docx
-
2044施工现场环境污染的防治措施.docx
-
12371党务平台操作手册.docx
-
Catia百格线生成宏复习过程.docx
-
725kV及以上电压等级支柱瓷绝缘子运行规范.docx
-
1144甑底链板机说明书.docx
-
100个著名初等数学问题.docx
-
201X中学寒假工作计划范文.docx
-
111 生物的特征 练习 人教版七年级上册生物.docx
-
110KV变电所设计变压器翻译.docx
-
9920第二学期学校工作总结.docx
-
0911二级技能解答.docx
-
33415设计说明书正文.docx
-
311教育学基础综合大纲.docx
-
201浙江普通高校招生选考科目考试地理试题和答案解析.docx
-
C语言程序的设计实验实验指导书及答案.docx
-
272相似三角形的性质和判定.docx
-
ACCAHA不稳定型心绞痛和非ST段抬高心肌梗死治疗指南修订版摘要.docx
-
baosteel标准对照 外标含量.docx
-
M1模拟练习题.docx
-
ARM体系课程设计实验报告.docx
-
Android面试题整理.docx
-
gaoer.docx
-
CPⅢ测设方案.docx
-
国家级星火计划项目申报书.docx
-
国培个人培训心得体会.docx
-
哈尔滨东风本田经销商销售人员激励制度研究报告开题报告书.docx
-
绩效管理川省城镇生活污水处理厂运行考核评价表精编.docx
-
寒假假期计划共10篇 doc.docx
-
监督抽查抽样方法整理稿资料.docx
-
建设工程施工合同解除权行使中的法律问题研究.docx
-
建筑工程清包工等价格.docx
-
核安全及民用核安全无损检测概论单选题.docx
-
江苏省航道养护管理办法汇总.docx
-
互联网+民宿营销策略之欧阳化创编.docx
-
江西省吉安一中届高三第二次段考地理.docx
-
交通运输系统法律法规考试题库单选题.docx
-
教科版小学语文三年级上册14美丽的小兴安岭说课稿.docx
-
220kV城南变电所工程施工组织设计.docx
-
单位聘用医生协议书.docx
-
linuxgrep命令学习与总结.docx
-
QQ个人档案资料.docx
-
湖南省浏阳市学年高二语文下学期升学摸底考试试题.docx
