 日立YPVF电梯培训教程.docx
日立YPVF电梯培训教程.docx
- 文档编号:8948519
- 上传时间:2023-02-02
- 格式:DOCX
- 页数:35
- 大小:742.77KB
日立YPVF电梯培训教程.docx
《日立YPVF电梯培训教程.docx》由会员分享,可在线阅读,更多相关《日立YPVF电梯培训教程.docx(35页珍藏版)》请在冰豆网上搜索。
日立YPVF电梯培训教程
日立YPVF电梯培训教程
第一节YPVF系统的构成
一、日立YPVF电梯的特点
1、采用交流变频变压调速系统。
2、采用微机控制
3、采用数字选层器
4、采用串行通信
5、把编程器和计算机做在同一块电路板上。
二、YPVF电梯的系统构成
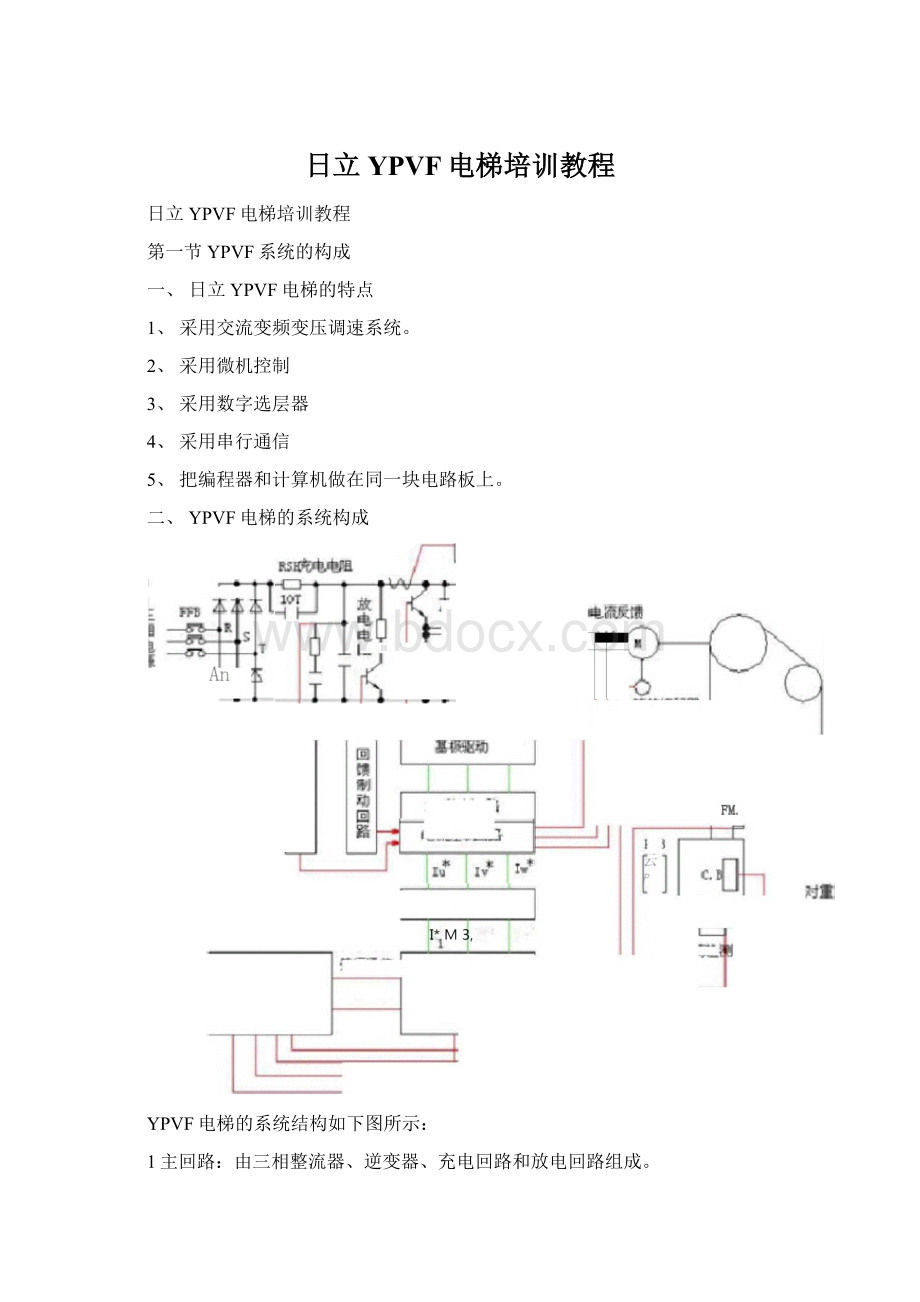
YPVF电梯的系统结构如下图所示:
1主回路:
由三相整流器、逆变器、充电回路和放电回路组成。
在桥式整流器上加的大容量电容器和RC滤波回路,用来滤波,稳定直流电压。
直流侧设置了放电回路,当电梯制动时会引起直流侧电压的上升,当电压上升到一定值
时,可通过硬件回路使反馈三极管自行导通,把反馈的电能消耗在放电电阻上。
在运行接触器10T上并有电阻R1,其作用是在电梯投入运行前,使滤波电容有个预充
电,当10T接通电梯投入运行时,避免因电容器瞬间大电流充电产生冲击,保护整流器和滤
波电容。
2、主微机:
采用M6802芯片,主要功能是负责机房控制柜与轿厢之间串行通信,以取得轿厢的开关信号、呼叫信号、与厅站进行串行通信,以取得厅外召唤信号。
以及进行开关门控制、运行
控制、故障检测和记录等。
3、副微机:
采用M68000芯片,主要功能是根据主微机的运行指令,负责数字选层器的运算、速
度指令生成、矢量控制,进行故障检测和记录,负责信号器工作。
4、电流指令回路:
根据副微机矢量控制演算结果,发出三相交流电流指令。
5、电流控制回路:
通过将电流指令回路中三相交流电流指令与感应电动机电流反馈信号比较,发出逆变器输出电压指令,比较各种反馈信号,决定指令是否生成。
6、PWM脉宽调制控制电路:
产生与逆变器输出三相电压指令对应的基极触发信号。
7、基极驱动电路:
根据PWM信号,驱动主回路中逆变器的大功率晶体管,使晶体管导通。
8、负荷检测装置:
检测轿厢负荷并输送负载信号给副微机,以进行起动力矩补偿,使电梯运行平稳。
另外,YPVF系统中还包括:
与感应电动机随动,可发送脉冲信号到主、副微机的旋转编码器、传递楼层位置信号的位置检测器FML可接受指令信号和开关输入信号的轿操纵箱
C.B和厅外召唤箱H.B,以及系统的各种保护装置。
YPVF的主微机和副微机之间采用并行通信,共同控制又互相监控。
第二节YPVF的运行过程
1运行准备
当合上电梯动力电源开关后,R、S、T出线端有交流380V电压,控制柜上的电压表VM
应有电压指示,电源指示灯PL亮。
漏电检出器投入工作,如有漏电,99C吸合,其C2、A2
点闭合,主开关FFB线圈吸合,使FFB不能合闸。
如无漏电,FFB可以合上,由阻容电路组成的过电压保护电路投入运行。
逆变器的排风扇FAN开始工作。
当三相电源R、S、T进入了整流器CNV后,经整流三相交流电变为直流电,2端为正,
3端为负。
由于此时10T处于释放状态,直流电只能通过冲击限流电阻RSH向大电容FILC
充电。
这个预充电功能减少了电梯启动时电流对电网的冲击,也保护了整流器和滤波电容。
此时虽然PMNA线端有电压,由于逆变器处于关闭状态,所以此时无输出。
当电源开关FFB合上后,变压器TR1、TR2、TR4、TR6有电压,各控
制回路得电,层楼指示器灯亮,合上控制柜上的轿厢照明开关LIGHT,轿照明亮,排风扇有
电。
此时如果安全系统正常,50B继电器吸合;门处于关闭状态,40D吸合;电梯处于运行准备状态。
2、外呼、开门
外呼电源P22A是直流+22V电源,如果轿厢停在一层,乘客按一下一层的向上召唤按钮
1U,+22V电源P22A经XH1-2,发光二极管,按钮1U,XH1-1接GD22AX同时经FIO输入输出板的XH1-3接口,经输入缓冲器X711+0输入电脑后使输出缓冲器Z711+0输出保持信号,1层上召唤发光二极管1U发光。
经电脑检索,
(1)电梯正在本层的平层位置;
(2)电梯处于关门状态;(3)电梯无运行指令;(4)本层有呼梯信号。
则电脑判断为本层开门。
经输出缓冲器Z102输出开门信号并
触发FLS导通,直流100V电压经AIOOt双向可控硅FL4Dl~101N(1,2)~R1~R2~R3t开门机At门
机开关DMCCUFB1OO,使门电动机旋转开门。
开门分两个阶段。
第一阶段,电流经R5D3分流,开门速度较快,第二阶段,开门行程开关14接通,电流经电位器R4的03、14端t14开关,D3与R5并联分流,少部分电流经开门机,开门速度较慢,直到将开门限位撞开,101N吸合,其常闭点(1、2)断开后,开门停止。
3、选、关门
乘客进入轿厢后,如按下5层的指令按钮,电路板上SDC上的直流+22V电源P22C经
X511+0输入缓冲器、SDQ的FU/14接口,5层按钮、接GD22A将轿呼叫信号输入电脑。
电脑储存并记忆。
输出缓冲器Z511+0输出记忆信号,选5层的记忆灯亮,经电脑判别定为上
方向运行。
经延时或按下关门按钮,经FI0板的Z101输出缓冲器输出关门指令信号。
负100V直流
电流B100经门机开关DMCCUT门电动机A、R3R2、继电器0Z(1,2)、二极管D2、双向可控硅FLS、A100导通。
门电动机向关门方向旋转。
此时关门电流经D4开关23、电位器
R4的03,23端分流,关门速度较快。
当将关门行程开关24撞到闭合后,分流增大,电梯
关门速度减慢。
当将关门停止开关撞开后,0Z释放,其常开点1,2断开,门电动机停止旋
转。
4、启动、运行、停车
经电脑检测,电梯有方向指令,厅、轿门电气联锁已闭合时,即发出运行信号。
50BT,
40DT,10TT,将大功率二极管速度电流直接与逆变器回路接通。
MPI板将给定标准电压送
给ACR板,经载频调制后进行脉冲分配,形成六路基极触发电压。
该触发信号经BDC板传送
放大驱动逆变器的六只大功率晶体管工作。
大功率晶体管经U、V、W线端输出调频调压电流,
再经电抗器L滤波,变得更加圆滑,再输入到曳引机的线圈,电动机开始启动。
FI0板的32FC/2接口经V15B输出打开抱闸的信号,抱闸继电器15B吸合,抱闸打开,
曳引机转动,轿厢上升。
在启动过程中,由于给定标准电压的变化,载波频率也不断变化,电动机的转速随着频率的不断变化而变化。
当启动过程完毕,给定电压稳定在某一数值,频
率也相应地稳定在某一数值,电梯即以稳速运行。
在运行过程中,与电梯曳引机同轴的旋转
编码器不断发出相应的脉冲数作为速度反馈信号反馈到MPU板与给定电压比较,用来调整电
压的频率,使电梯稳速运行。
在运行过中,电脑不断搜寻电梯运行方向的呼梯信号。
当电梯轿厢运行到4层时,电脑
己搜寻到5层停站信号。
经一定延时后,MPU电脑输岀减速给定电压,电梯开始减速。
当井道中第5层的隔磁板进入平层感应器FML时,电梯进一步减速,并开始计数到预定值时,10T释放,电梯停车。
15B释放,电梯抱闸。
电梯停止以后再抱闸称为零速抱闸,舒适感很好。
停车以后的电梯开门、关门动作与前相同。
5、电梯的检修操作
(1)轿检修操作
将轿厢操纵箱上的小盒盖打开,将“检修灯”开关板到下方(检修灯位),这时轿顶和
轿底的检修灯应该开亮。
再将〃检修”开关扳至下方向(检修位),电梯即为检修运行状态。
检修向上运行:
按下操纵箱上最高层的选层按钮,电梯将关门后以检修速度上行。
当电
梯到达平层区时,操纵箱上“OPEN按钮旁的红灯亮,如果这时松开按钮,电梯平层开门。
检修向下运行:
按下操纵箱上最低层的选层按钮,电梯将关门后以检修速度下行。
当电
梯到达平层区时,操纵箱上“OPEN按钮旁的红灯亮,如果这时松开按钮,电梯平层开门。
在检修运行中,松开按钮,电梯立即停止。
恢复快车运行状态:
在平层区恢复快车时,将“检修灯”和“检修”开关均板至上方(正常位),电梯即恢复快车状态。
如电梯不在平层区而将上述开关扳至上方时,电梯将自动鸣笛以中速运行到下一层平层位置停梯开门,恢复快车运行。
(2)轿顶检修操作
轿顶检修操作须两人配合操作。
将轿厢操纵箱上的开关置在检修状态,一人在厅门外,另一人在轿厢操纵电梯以检修速度向下运行。
当轿顶与厅门地坎基本平齐后,令轿人员停止
运行。
厅外人员用三角钥匙打开厅门,立即将轿顶检修箱上的停止开关扳至“停止”位。
或把轿顶操作开关拔至“轿顶操作”位。
厅外人员进入轿顶后,将“轿顶操作”开关置于轿顶操作位,把“停止”开关置于正常位,把“关门机”开关置于正常位。
关好厅门后,利用操纵盒上的“UF”或“DOWN按钮即
可在轿顶操作电梯以检修速度上行或下行。
当“轿顶操作”开关置于轿顶操作位时,轿人员
操作无效,电梯只能听命于轿顶人员的操作。
在轿顶操作检修时,电梯每运行一次,轿门就要开关一次。
如果不需要轿门每次都开关,可把轿门关好后,再把“关门机”开关置于关门机位。
则轿门就不再打开了。
工作中,如遇紧急情况可将轿顶操作箱的“停止”开关或操纵盒上的“停止”开关扳下,
使电梯停止。
(3)机房检修操作
将轿操纵箱上小盒各开关置于正常位,在电梯停止状态时,操作MPU电子板上的按钮来
进入检修状态。
进入检修的操作方法:
依次按M0DE-3-SET
电梯即进入检修状态。
如再按(7),电梯关门,低速上升。
松开电梯即停止,开门。
如再按(4),电梯关门,低速下降。
松开电梯即停止,开门。
退出检修的操作方法:
依次按M0DE-3-RESET
电梯就恢复自动运行状态。
第三节YPVF的数字选层器原理
1旋转编码器
旋转编码器与电动机同轴连接,随电动机的转动,产生脉冲信号输出,以此可以检测运
行距离。
输出脉冲送微机的转速检测回路。
可以检测运行方向,先行距离及减速距离。
2、怎样利用旋转编码器判断运行方向
旋转编码器每一转产生1024个脉冲,采用两相检测,两相相差90度,因此可以判断轿厢是上行还是
下行。
Lj
嘶电书F行诙嵩电毛上石
由图可见,由两个JK触发器及非门构成方向判断,结果送PIA。
由PTM进行脉冲计数。
电梯下行时,0B超前0A90度。
上行时,©B滞后$A90度。
当F为高电平时,表示电梯下行。
当E为高电平时,表示电梯上行。
3、数字选层器
由旋转编码器就能取得电梯的位置信号,要完成选层器的功能,应弄清以下几个概念:
(1)同步位置
反映电梯在井道中的实际位置,以最底层厅门地坎平面作为计算起点。
电梯运行时,不
断接收旋转编码器发来的脉冲,上行为增计数,下行为减计数。
计算数值就是同步位置的数
值。
(2)层咼表
电梯安装完成后必须进行层高测定,即把两层厅门地坎之间测得的编码器脉冲数值存入相应的层高表。
(3)同步层
由同步位置和层高表可计算岀同步层。
同步层用于层楼显示,己响应的轿指令和厅外召
唤信号的消号,运行方向的选择等。
轿厢到达每两层中点时,同步层加1(上行时)或减1
(下行时)。
(4)先行位置
先行位置由层高表、同步层及先行距离速度码决定。
速度指令发生后,加速开始,速度
按级递增,VI、V2、V3・・・Vn。
由于为加速运行,随速度提高,每级的运行距离不同,为了避免重复计算,将这些距离编成表格存于微机,对应的运行距离为SI、S2、S3・・・Sn。
先行距离AD为:
速度指令开始tAD=S1
随着速度的递增tAD=AD+Sn
全速度运行tAD=AD计数脉冲
另一方面,从速度指令产生开始,根据层高表及同步层可计算岀先行位置:
先行位置二(同步层)层高表土先行距离(其中〃+”时为上行,“-”时为下行)
(5)先行层
当电梯在某层停止时,先行层等于同步层,但在电梯起动瞬间,电梯上行时即转为上一层,电梯下行时即转为下一层。
先行层比同步层顺向超前一层。
电梯从起动运行开始,即检测轿厢和厅站的召唤信号,如发现有一个召唤信号与先行层
相同,且先行位置等于先行层时,电梯即发生减速信号,进入减速准备阶段。
但召唤信号有可能是单层运行,这样,电梯一起动就会发现先行位置等于先行层,且先
行层有招唤,电梯未完成加速就要进入减速,因此微机加入了判断程序。
先行位置算出后,立即将它与同步位置进行比较,如果:
先行位置-同步位置〉常数(上行)
同步位置-先行位置v常数(下行)
由为多层运行。
4、同步位置的校正
由于电梯不停地上行、下行,就可能受到各种误差,使得同步位置偏离层高表,因此要进行同步位置的
校正。
校正方式有:
起动校正、停层校正、运行
电梯利用轿顶的传感器进行同步位置的校正,
校正、停电校正。
(1)起动校正:
电梯起动时,感应器离开隔磁板。
校正同步位置。
起动校正时,因为电梯速度还很底,
(2)停层校正:
电梯停层时,感应器插入隔磁板。
停电校正:
一旦停电,微机将停止运行,所有RAM中的数据都将丢失,而且轿厢还会滑行一段距离。
因此,停电瞬间,微机发生的停电中断以最优先时间,在电源未完全消失时
将重要的数据送入掉电保护RAM当电源恢复时,根据保护RAM的数据,电梯执行低速自救,直至最近一层的开门区,取得轿顶感应器信号,即可取得同步层、同步位置、先行层等数据。
如果停电时间很长,超出保护时间,保护RAM的数据也己丢失,则在复电时,电梯会自动以低速向端层运行一次,以取回同步位置数据。
第四节YPVF控制屏与轿厢的串行通信
一、轿厢送控制屏的主要信号有:
轿指令按钮;
司机操作的有关按钮,选向、直驶、起动;
有/无司机,检修,轿顶检修,轿、轿顶急停开关;
轿顶检修上行、下行;轿、轿顶开关门按钮;安全窗、安全钳开关;轿顶感应器信号;轿厢的载重量信号等。
控制屏送轿厢的主要信号有:
层楼指示;轿按钮指令灯;开关门按钮灯;
门电动机驱动、轿、照明、风扇;各类报警、报站钟等。
、串行通信的硬件组成
YPVF电梯控制屏及轿厢分别用一块大规模集成电路SDA进行串行通信。
控制屏的SDA
装在MPU板上,轿厢的SDA安装在轿顶SDC线路板上。
SDA芯片采用全双工通信方式,收发同时进行,且在无CPU介入的情况下也能进行自动
地址扫描,收、发信息。
因此,轿顶SDC板只用一块SDA芯片就能处理轿厢的78个输入信
号和67个输出信号,最大传送能力可达128个输入和128个输出信号。
串行传输采用2入
2出4线方式,即可传送上述全部信号。
SDA的结构如下图所示
△数据总銭e/ie
IIXfT-»A
SDA芯片的结构
控制屏侧的SDA的工作由MPL控制,用数据总线的低8位由6802向SDA的收信、发信RAM卖出、写入数据。
MSI二0MS2二0时选中发信RAM可以将发信数据写入RAM寄存,再串行发送出去。
MS1=0MS2=1时选中收信RAM可将串行传送来的数据按顺序放到RAM以便读
SYUC
AT・・•M
A7
3■•
出。
AB6AB5AB4AB3四条地址总线确定发信信RAMRAM或收信RAM的16个字节单元。
写入发且的容自动按地址顺序连地址一起发送岀去,连续接为连续不断重复发送。
接收也为不间断RAM地址收,并将接收容按地址送到相应的收信单元。
SDA的通信格式如下图所示
DO
我的通信格式
同步字头SYNC为24bit01…110,同步字尾END为16bit00-00,每一次传送为120bit,
其中地址、数据均采用正反两次校验,先送地址再送四组数据,地址从高到低排列,数据从低到高排列。
地址中含A6=AB6,A5二AB54次传送可传完一个文件,将发信RAM勺16个单
元容传送完毕,共480bit,A6A5为00、01、10、11,然后再从头连续传送。
发送容从SOI、S02送岀,为了适应远距离传送,SOI、S02送出的信号为交变波形。
如
下图所示。
1110110100ul1110
Qi_n_nnRLTT
八门Fl/
交瑚一珏
接收整流|4—匚
信号传送波形图
例如:
当传送信号11110时,第一个“1”S01上跳,第二个“1”S02上跳,第三个“1”S01上跳……。
SOI、S02逢T”交替上跳,第二位回跳。
这样,就可以方便地用变压器进
行隔离,形成交变波。
如下图。
轿顶SDA工作示意图
So】*
SqL
Ai:
轿顶SDAI作于自动地址扫描方式。
在时钟触发下,地址计数器自动计数。
控制屏送来
的串行数据由Sin输入,SDA部进行同步检测、数据正反校验,错误即发岀信号。
正确数据送移位寄存器转为并行数据。
地址比较器将扫描地址与接收地址比较,如果一致就将接收数据
经接收数据接收RAM送到8位兼容数据锁存器分配到各驱动口。
轿厢送控制屏的数据随扫描地址的变化译码产生SI、S2……选通信号,将各输入口数
据读入相应的发信RAM在计时器的控制下移位成串行数据,再加入地址数据及同步字符,形成完整的串行信息,然后转换成交变波,从SOI、S02输出,经变压器隔离送控制屏。
SDA不可编程,全由硬件组成。
第五节YPVF电梯的负荷补偿
一、YPVF电梯的预补偿功能
YPVF电梯采用了随负载变化线性连续补偿的功能。
二、差动变压器的工作原理
YPVF的荷重传感器采用差动变压器,安装在轿厢底部。
差动变压器的原理如图所示:
鉄芯位移
差动变压器工作原理图
变压器由原边线圈、两个副边线圈及铁芯组成。
原边线圈输入交流电源,副边则输出感应电压,随铁芯的深度增大,感应电压升高。
负荷补偿装置原理:
交流电压经磁饱和变压器稳压后送差动变压器原边,副边输出经全波整流后反向叠加,随铁芯插入深度的增大,其电压升高,调整RG1RG2可调整输出斜率。
因为它可以使铁芯
在同一位置时输出电压增大或减小,RG1为粗调,RG2为精调。
偏置回路在输出中叠加一个反向电压,它可以调整曲线的平移,调整零点位置,输出电
压要低消偏置电压,偏置电压升高,输出曲线往右移。
利用开关选择,可以得到不同状态的
补偿特性。
第六节YPVF控制板的功能一YPVF型电梯使用的五块基本电路板:
INV-MPU微电脑基板
INV-FIO:
接口板
INV-ACR:
电流调节板
INV-BDC:
基极驱动板
INV-SDC:
串行通讯板
YPVF型电梯所使用的五块基本电路板组成的系统框图如图
1所示
INV-MPU
外呼登记灯馆示灯门电路灯
全停点吓K门外回厅
A-
INV
■
FI0
纵称幵挣黄S选开装内S&关
INV-ZCR
▼
INV-BDC/
p-W块
IM
R.E
YMF电忧累统方框圈
1、微电脑基板INV-MPU
YPVF电梯控制系统通过微电脑板
MPU实现电梯的集选控制、
INV
SDC
内选登记灯、钟、漿明
速度控制及特殊控制。
板上有
2KRAM畐UCPUM6800Q48KEEPR0M8KRAM,4X4键盘和LED
两块CPU(主CPUM680224KROM
发光二极管显示。
对MPU板,各插座及指示灯说明如下:
1)插座的作用:
大型插座有
等,具体功能如下
FA与负载补偿控制电路板INV-AD连接,将负载反馈信号传送至副微机;
FD将FI0板传来的信号由此进入电脑;
FB:
将电脑发生的信号由此传输至
FL:
制造商经过此插座与主微机联接;
FF:
由微机发生的信号经此传输至
FC:
将存储器连接到备用电池,使
FG将控制系统与旋转编码器连接;
FH用于轿厢通信;
FK声音合成电路(较少使用)。
2)主、副微机:
在MPU板正面左上角,装有主微处理机芯片M6802及存储器芯片6116。
主微机的主要任
务是负责电梯的集选控制、实现各种特殊功能、运行控制、召唤及轿厢指令管理、开
关门控制等;副微处理芯片是16位芯片M68000,运算速度比主微机快,主要进行
电梯的速度控制运算。
3)EEPRO存储器:
该存储器的最大特点是可在施工现场对电梯部分参数或程序进行更改、
调试。
而不必象EPROM?
储器在写入前必须先用紫外线擦除,在此,主要用于存储电梯运行
提升楼层高度数据等。
FA、FBFD
FIO板;
FL、FF,小型插座有FC
INV-ACR;
RAM在断电后仍能保存有效数据;
FE、FGFH
FJ、FK
4)操作盘:
装有4X4按键的键盘及LED显示器。
通过键盘及显示器可随时检查电梯主要参数,如:
查询故障;
显示运行累计时间;
在机房设置呼梯登记;
机房进行检修运行;
楼层测高数据写入;
检查电梯各种参数;设置专用运行等。
5)发光二极管的意义:
M.WDT■—实时监视主微机硬件和软件的工作情况。
任何一方有故障都会使M.WDT丁熄灭,
电梯不能继续工作;
S.WD监视副微机的软、硬件工作情况;
SYC串行通信工作指示灯。
串行通信正常工作时点亮;
HALT软件暂停指示灯,正常工作时此灯不亮;
6)SDA串行通信数据适配器
SDA发光二极管表示它的正常工作与否。
SDA串行通信数据适配器用于电梯机房控制柜电脑
板与轿厢控制之间的数据通信、并联电梯间的通信及对电梯出厂数据的写入。
2、接口板FIO
接口板FIO为计算机MPU与外部设备联系的输入、输出接口缓冲器,对保证电梯控制系统正常通信、可靠运行起着重要隔离、驱动作用。
输入信号:
包括外召唤及各触点信号经FIO送入MPU经特殊的混合集成电路隔离;
输岀信号:
FIO驱动继电器、接触器、开关门动作,驱动采用晶闸管或数字功率门阵列集成电路。
对于和安全有关部门的信号,FIO分别送主、副微机,一旦主、副微机收到的容不同,就控
制电梯立即停止运行。
接口板FIO的作用及组成简述如下:
1)板上各插座的作用:
共有FA、FBFCFDFE、FF、FGFHFJ九个插座,各个的作用如下:
FA向MPL板输出信号(OUT;
FB:
从MPU板输入信号(IN);
FC:
连接与门控制器、接触器(15B——抱闸驱动接触器;10T——运行接触器)等有关的信号;
FD供密码控制的召唤按钮用(很少使用)
FE:
连接按钮及按钮指示为电路;
FF:
楼层指层灯、方向灯、满载及停止信号灯(OUT;
FG终端保护等开关输入(IN)
FH,FJ:
触点信号及安全开关信号(IN);
2)指示灯:
FI0板上只有一个指示灯40G,表示轿厢门的开、闭情况。
40G灯亮表示轿门和厅
门己关好;
3)门控制电路:
在板右上角有开关门可控硅电路,控制门的开启与关闭。
3、电流调节板INV-ACR
电流调节板ACR将霍尔器件HCT电流互感器测得的电动机U相、V相电流与副微机给出的电流指令进行比较,经比例积分构成对驱动电流的闭环调节,然后产生PWh脉宽调制波送
基极驱动板BDC此部分作为逆变器中晶体管开关控制信号,板上还具有停电检测、过电流、
过电压、再生回路检测等功能。
ACR板主要插座有:
FA基极触发脉冲关BD"(OUT
FB:
从霍尔电流互感器采样、反馈回来的电动机电流反馈信号(IN);
FC:
与微电脑板MPU勺信号连接(IN/OUT)
4、基极驱动板INV-BDC
基极驱动板BDC将ACR板送来的PW研关触发信号放大,并且直接驱动


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 日立 YPVF 电梯 培训 教程
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 广东省普通高中学业水平考试数学科考试大纲Word文档下载推荐.docx
广东省普通高中学业水平考试数学科考试大纲Word文档下载推荐.docx
-
计算题测试文档格式.docx
-
会计年终总结范文精选10篇Word文件下载.docx
-
基坑支护及降排水方案Word格式文档下载.docx
-
古代诗歌鉴赏一剪梅学案Word文档格式.docx
-
国标舞考级Word文件下载.docx
-
机电工程质量验收规范是什么Word文档下载推荐.docx
-
技术员工作自我评价文档格式.docx
-
交警支队车棚改造工程施工合同文档格式.docx
-
护士变更注册申请审核表与示范文本Word文档下载推荐.docx
-
最新学校新冠肺炎疫情防控应急预案Word文件下载.docx
-
GB50204钢筋规范之欧阳总创编Word格式文档下载.docx
-
《半期整改措施》Word格式.docx
-
诊断 症状学腰背痛关节痛汇总.docx
-
英美文学欣赏The Analysis of Shelleys Ode to the West Wind.docx
-
增值税营改增所得税消费税车购税测试题.docx
-
整理二级建造师管理真题.docx
-
英语三级重点高频词汇导入背单词APP使用.docx
-
浙教版学年九年级数学上册第2章测试题及答案.docx
-
证件照教学设计方案.docx
-
优品课件之《从锁国走向开国的日本》教案.docx
-
整理北京交通大学万用表组装实验报告.docx
-
质量管理计划.docx
-
有机化学鉴别.docx
-
整理照明灯饰灯具行业分类英语词汇.docx
-
濉溪县城市总体规划公示.docx
-
智能化工程质量验收记录表.docx
-
学生会纪检部工作总结.docx
-
幼儿园保教主任发言稿.docx
-
跆拳道协会工作总结.docx
-
中国茶叶店连锁市场竞争分析与竞争战略研究报告.docx
-
学宪法讲宪法主题演讲稿800字精选5篇弘扬宪法精神演讲稿5篇.docx
-
危险驾驶罪司法解释有哪些.docx
-
数据结构实验与课程方案指导书.docx
-
卫浴洁具维修顾问知识.docx
-
售楼部年度工作总结.docx
-
微型党课教案精选多篇.docx
-
实际控制人问题专题研究分析.docx
-
人教部编版四年级语文下册全册说课稿.docx
-
乡镇元宵节活动总结.docx
-
小学生秋季开学国旗下演讲稿.docx
-
人事专员年终总结与商务局年度工作总结汇编.docx
-
小学100以内乘除法练习题二年级.docx
-
屋面专项施工方案.docx
-
小学信息技术电脑绘画优秀作品.docx
-
台州市建设工程施工现场关键岗位人员管理办法模板.docx
-
药剂学知识总结.docx
-
宜山镇三小教师奖励性绩效工资考核实施方案.docx
-
年处理4万吨马铃薯深加工项目建设可行性研究报告.docx
-
小学教师师德师风自查报告doc.docx
-
食堂招投标文件.docx
