 PID.docx
PID.docx
- 文档编号:8916311
- 上传时间:2023-02-02
- 格式:DOCX
- 页数:13
- 大小:577.11KB
PID.docx
《PID.docx》由会员分享,可在线阅读,更多相关《PID.docx(13页珍藏版)》请在冰豆网上搜索。
PID
PID控制器的设计
一、实验目的
1.了解PID控制规律及其控制器实现以及P、I、D参数对控制系统性能的影响,学会用Simulink来构造控制系统模型。
2.本实验首先用MATLAB描述对象的模型,分别采用P、PI、PD、PID控制器构成闭环控制系统,并求取闭环系统的阶跃响应;在此基础上变化P、I、D参数的值,了解比例、积分和微分参数对控制系统性能的不同影响,并用Simulink来构造控制系统模型。
二、实验内容
临界比例带法
临界比例带法适用于已知对象数学模型的场合,且被控对象是3阶或者3阶以上系数。
在闭环控制系统中,将调节器置于纯比例作用下,从大到小改变调节器的比例带,得到等幅振荡的过程。
此时的比例带称为临界比例带δk,相邻两个波峰的时间间隔称为等幅振荡周期Tk。
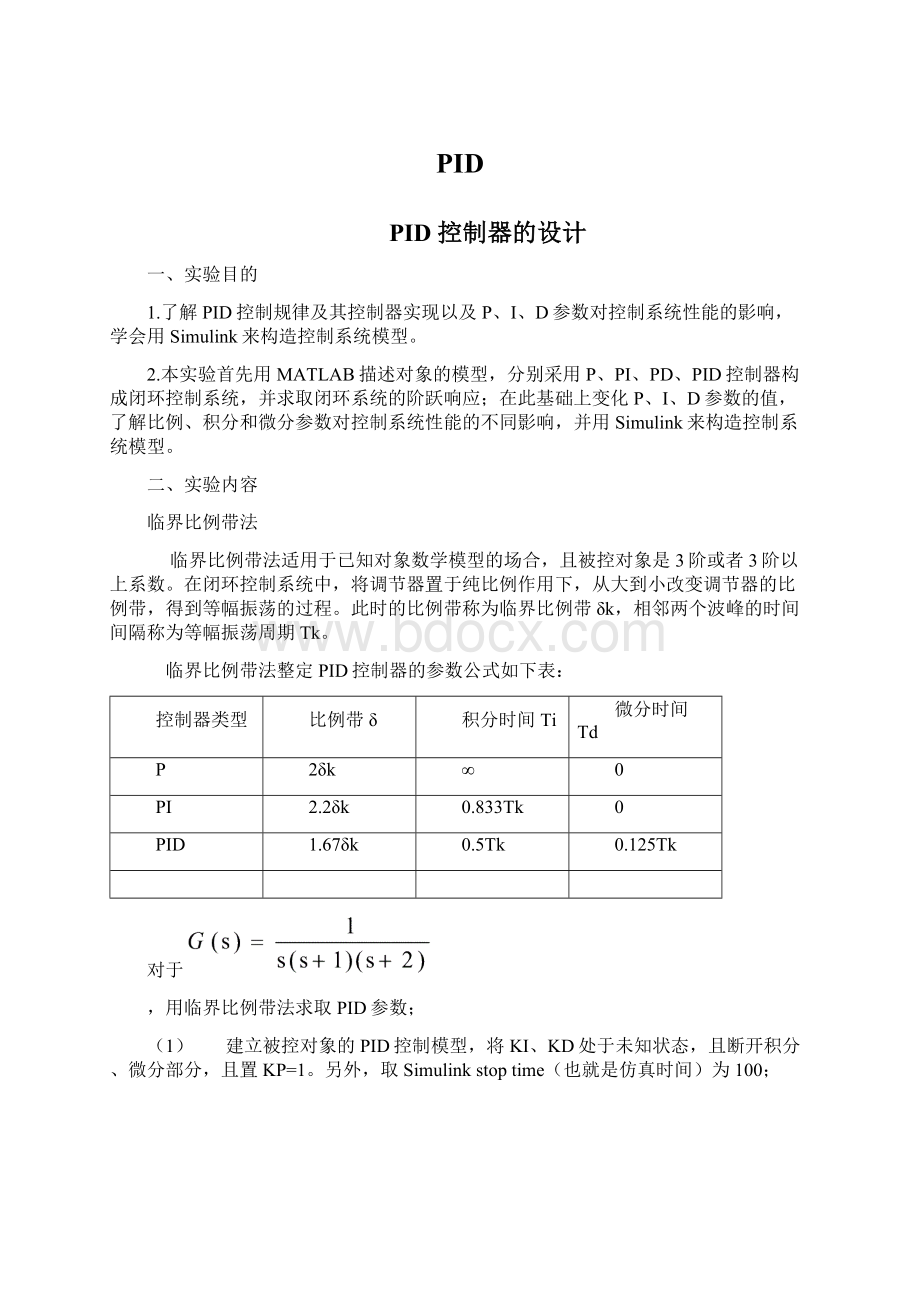
临界比例带法整定PID控制器的参数公式如下表:
控制器类型
比例带δ
积分时间Ti
微分时间Td
P
2δk
∞
0
PI
2.2δk
0.833Tk
0
PID
1.67δk
0.5Tk
0.125Tk
对于
,用临界比例带法求取PID参数;
(1) 建立被控对象的PID控制模型,将KI、KD处于未知状态,且断开积分、微分部分,且置KP=1。
另外,取Simulinkstoptime(也就是仿真时间)为100;
其中,1)step模块,设置steptime为0,从t=0开始;
2)sum模块,sum1设置listofsigns为+-,设置listofsigns为+++;
3)gain模块,Gain1设置Gain为1;
4)Zero-Pole模块,设置Zeros为[](不存在零点),设置Poles为[0-1-2](三个极点),Gain设置为[1];
(2) 以10倍速度逐渐增大KP,直到系统发散,然后再以1/2调节使其收敛,最后得到等幅振荡的输出。
当KP=10时,系数发散;当KP=6时,得到等幅度输出,记下此时的KP=6;
KP=10
KP=6
(3) 由得到的等幅度输出,得到等幅振荡曲线的周期Tk=5.5,δk=1/6;
(4) 根据临界比例带法整定PID控制器的参数公式,得到Ti=2.75,Td=0.6875;
(5) 设置KP为6,就是得到等幅振荡时的KP,Gain1为1/Ti=1/2.75,设置Gain2为Td=0.6975,并连接积分、微分两路;
(6) 开始仿真,查看系统输出。
四、实验内容
一、已知:
二阶系统
1.Step函数求取对象的开环响应曲线;指出稳态误差Ess和调节时间Ts。
\
2.采用比例控制器P构成闭环反馈系统;选取Kp=100,用Step函数求其闭环响应曲线;指出稳态误差Ess、超调量
和调节时间Ts。
3.采用比例积分控制器PI构成闭环反馈系统;选取Kp=50,Ki=100,用Step函数求其闭环响应曲线;指出稳态误差Ess、超调量
和调节时间Ts。
4.采用比例微分控制器PD构成闭环反馈系统;选取Kp=100,Kd=10,用Step函数求其闭环响应曲线;指出稳态误差Ess、超调量
和调节时间Ts。
5.采用PID控制器构成闭环反馈系统;选取Kp=100,Ki=200,Kd=10,用Step函数求其闭环响应曲线;指出稳态误差Ess、超调量
和调节时间Ts。
6.分别变化PID参数值中的一个参数,求取闭环控制系统的阶跃响应,得出相应参数对控制性能的影响效果。
采用Simulink和M文件两种方法构建闭环控制系统。
问题分析:
由于在输入程序以及数据的时候发生了一些问题使得无法正确运行出结果,为此耗费了很多时间。
通过这次实验,我对matlab软件的掌握又深入了一步,对计算机控制这门课程的理解又有更实际的见解。
我相信我所学到的技能在将来会有用武之地。
在这次实验中,主要遇到的问题还是程序的读写,因为确实没有什么程度功底,所以还是比
较困难的一件事情,但是我们多去看,结合课本上学到的相关知识,多去联系和理解,这样就会
的到不少这方面的收获。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- PID
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《短歌行》原文翻译及赏析.docx
《短歌行》原文翻译及赏析.docx
-
《跳水》教案3.docx
-
《基于MATLAB的信号与系统实验指导》编程练习.docx
-
《选修4化学反应原理》知识点总结整理超全.docx
-
2环境应急监测试题资料.docx
-
《自动化仪表工程施工及验收规范》GB50093仪表安装检验批.docx
-
6阅读能力阅读方法指什么.docx
-
CMYK色值参考.docx
-
3121护理查对制度.docx
-
《合理安排时间》说课稿.docx
-
3dmax授课计划doc.docx
-
《中共中央国务院关于加快推进生态文明建设的意见》.docx
-
《永生的眼睛》练习题附答案.docx
-
flow3d官方培训教程中的实例中文说明.docx
-
EMS基础知识综合练习复习资料.docx
-
100以内退位减法500道带竖式空间可直接打印.docx
-
JGJ59建筑施工安全检查标准评分表全套.docx
-
minecraft匠魂教程.docx
-
c语言课程设计学生成绩管理系统.docx
-
Powerdesigner使用指南范本模板.docx
-
《钢渣处理安全规程》word版.docx
-
Excel试题大全.docx
-
《建筑施工》在线作业二7FEABED6720A4AF.docx
-
《海上钢琴师》观后感高中生范文.docx
-
《机电一体化系统设计基础》作业1234参考答案.docx
-
《医学影像技术》期中考试.docx
-
5套打包全国通用小学四年级语文上期中考试单元综合练习题含答案解析.docx
-
12米以下为双立杆扣件式脚手架计算书.docx
-
《雾在哪里》教案.docx
-
vocsrto废气处理系统设备技术说明书.docx
-
《国有企业劳动合同管理制度》.docx
-
《新春第一课》观后感例文.docx
-
县科技局2021年工作总结和2022年工作计划文稿文档格式.docx
-
论无过失责任Word文件下载.docx
-
四川省建筑业企业资质管理规定实施细则Word文件下载.docx
-
2021年党史学习教育组织生活会个人对照检查情况报告1010字文Word下载.docx
-
海口市春秋版七年级上学期期末地理试题D卷Word格式文档下载.docx
-
缩句及答案Word文件下载.docx
-
连接器生产专业术语中英文对照参考模板文档格式.docx
-
教师上半年工作总结4篇Word格式文档下载.docx
-
易灯在线招商手册Word格式文档下载.doc
-
2021年区党群服务项目化管理工作方案文稿Word下载.docx
-
2021年在全市打击治理冻品走私工作会议上的讲话文稿Word下载.docx
-
2021年党史学习教育专题组织生活会个人对照剖析检查材料940字文Word文件下载.docx
-
计算机控制技术课程设计基于at89s52单片机的比赛记分牌设计Word格式文档下载.docx
 中餐热菜教学课件作者徐小林价廉物美豆制品课件PPT课件下载推荐.pptx
中餐热菜教学课件作者徐小林价廉物美豆制品课件PPT课件下载推荐.pptx
-
2021年基层党支部班子党史学习教育专题组织生活会个人对照检查剖析材料3880字文Word格式.docx
-
企业所得税年度申报表A类Word格式.docx
-
县局党组2021年意识形态工作情况的报告文稿Word文档下载推荐.docx
-
看懂汽车玻璃隐藏玄机Word文档下载推荐.docx
-
四川省成都市龙泉驿区第一中学校高二下学期入学考试数Word文档下载推荐.docx
