 协整与误差修正模型35.docx
协整与误差修正模型35.docx
- 文档编号:8751554
- 上传时间:2023-02-01
- 格式:DOCX
- 页数:9
- 大小:115.65KB
协整与误差修正模型35.docx
《协整与误差修正模型35.docx》由会员分享,可在线阅读,更多相关《协整与误差修正模型35.docx(9页珍藏版)》请在冰豆网上搜索。
协整与误差修正模型35
第三节协整理论——时间序列的协整关系一、问题来源
来源:
伪回归现象
MC模拟结果表明,2个相互独立的非平稳序列很可能建立显著的回归模型,这意味着传统统计检验方法失去意义。
2个含有趋势但无关的序列很可能建立显著的回归模型。
产生问题:
非平稳序列能否直接建立回归模型?
二、平稳性
(一)平稳时间序列
定义:
E(yt)="COV(yt,yt』)二r(s)
(序列的相关性只与间隔有关,与时刻无关)推论:
D(yJ=r(0)=常数
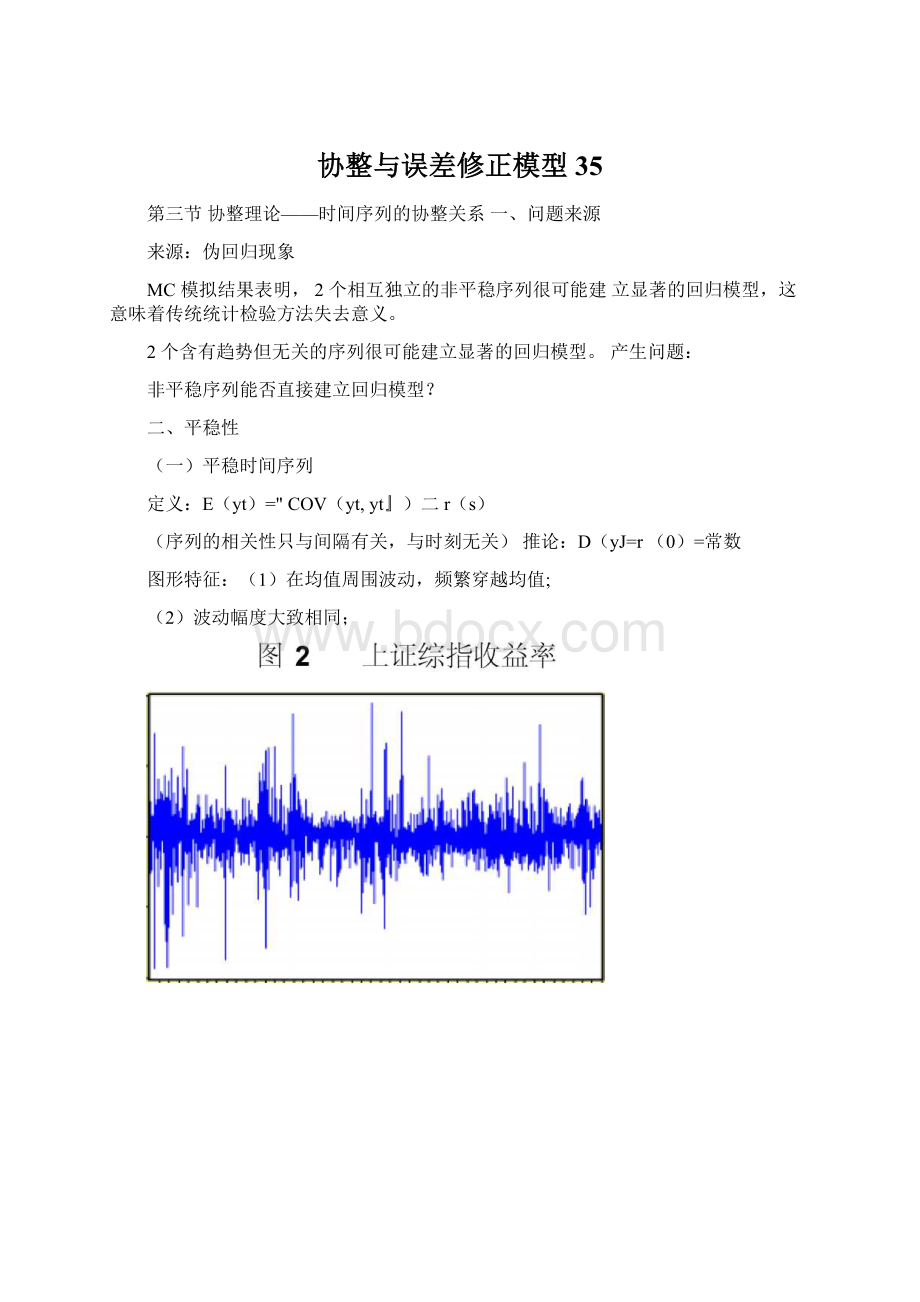
图形特征:
(1)在均值周围波动,频繁穿越均值;
(2)波动幅度大致相同;
图1日元兑美元差分序列
平稳时间序列的含义:
任何外来冲击(或振动)对序列变动轨迹的影响是短暂的,t时刻的振动影响在t+1期会减弱,t+2期会更弱,随着时间推移这种影响会逐渐消失,序列将恢复到其平均水平(称外来冲击影响具有“短记忆”特征)。
但是,对于非平稳时间序列,振动的影响会无限地持续下去,t时刻的振动影响不会在以后的时期中衰减,所以序列也难以恢复到一个稳定状态。
(2)常见平稳序列
1.白噪声过程(whitenoise)
记成:
E(yJ=0D(yJ乂2COV(yt,yJ=0
2.自回归过程(Autoregression—AR)
y「y-1tI|1,厂i.i.d(0,二2)
yt=0.3*yt-1+£tAR
(1)
(三)常见非平稳序列
1.趋势平稳过程(trendstationary)
(又称为:
退势平稳过程,确定趋势平稳过程)
性质:
(1)E(yd=a+3,D(yt)=-2,COV(yt,yt-s)=0
(2)图形:
围绕趋势线等幅波动,外来冲击影响短暂;
(3)可以扩展成带趋势的AR过程:
yt=a+3+柳一1+q|时<1
(4)平稳化处理:
方式1:
退势(消除长期趋势)
方式2:
差分
2.随机游走过程(randomwalk)和单位根过程(unitroot)定义:
随机游走过程:
yt=yt-1+&,&、i.i.d(0,-2)
单位根过程:
y=yt-i+&,&"平稳过程
性质:
(1)外来冲击影响有长记忆性,难以回到稳定状态。
(2)—阶差分为平稳过程(即增幅是平稳的)
2200
2000
1800
1600
1400
■■■I■■■I■■■■I■■■I■■■■I■■■■I■■■■I■■■I-■■■I■■.I....I....
50100150200250300
3.带飘移项的随机游走过程/单位根过程(随机趋势过程)
yt=a+yt-i+g
4.带飘移项、趋势项的随机游走过程/单位根过程
yt=a+bt+yt-i+牟
三、单整性
1.定义:
若非平稳序列yt经过d阶差分后成为平稳序列,则称其为d阶单整序列,记成:
yt〜1(d);特别的,平稳序列记成1(0)
2.性质
(1)若yt~I(0),则:
yt~I(0)
(2)若yt~1
(1),则:
yt〜1
(1)
(3)若xt,yt~I(0),贝厂■yt~I(0)
(4)若Xt~I(0),yt~I
(1),贝厂Xty~I⑴
(非同阶单整序列的线性组合服从高阶单整)
(5)若Xt~I
(1),yt~I
(1),则
「1
(1)一般情况下
:
x:
y〜
tyt1(0)协整情况下
(同阶单整序列的线性组合可能会降阶)
3.单整性检验
-单位根检验(
DF/ADF检验)
等价检验模型:
检验模型:
(1)
人二yt-i
t
y-it
(2)
%八yt
yry-i
(3)
yt-:
t
丁2
A「t气
H0:
—1,H!
:
丫:
:
1
Ho:
=0,H1:
:
0
原假设:
单位根过程,备选假设:
平稳(或趋势平稳)过程。
即:
当检验统计量的伴随概率P=时,是单位根过程,P厂时,是平稳(或趋势平稳)过程。
说明:
(1)单位根检验过程通常按照模型3—>2—>1的顺序进行检验;这个检验顺序容易犯第H类错误,即误认为存在单位根(非平稳),所以在p•〉时,还要由模型2、1进一步判断是否是平稳过程,以免错误接受假设。
总之,平稳的结论容易接受,非平稳的结论要慎重。
(2)利用模型3检验时,如果p「则拒绝存在单位根的原假设,但并不意味着序列是平稳过程,实际上是趋势平稳过程,还需要经过1阶差分才是平稳序列。
(3)当序列是AR(p)或误差项£存在自相关性时,此时采用ADF检验(扩展的DF检验):
丄yt二yt_1'i厶yt」•;t
uy—•v"y—•;t
iyt=:
ryt_i'iayt_i;t
ADF检验要确定适当的滞后阶数,可以用AIC和SC准则来确定
四、协整性
1.定义:
设时间序列Xit,X2t,…,Xkt~l(d),都是d阶单整序列,且存在非零向量a(r,>2,…,〉k)',使得-Xi•>2X2亠「i:
:
kXk~I(d-b),
,则称变量Xix,…,Xk之间存在阶数为(d,b)的协整关系,简称Xi之间的关系是协整的,记成Xi~CI(d,b)。
其中,a称为协整向量,Xi的线性组合称为协整方程。
2.协整关系的含义
协整关系中,我们最感兴趣的是Cl(d,d),其中最常见的又是Cl(1,1),即x「x2,,xk~I⑴,而〉必g2X21心kxk~I(0)。
协整关系的统计含义:
若干个非平稳序列经过线性组合之后成为平稳序列。
例如,设yt,Xt都是一阶单整序列,如果Ut“yt—Xt~I(0),即:
yt二豪•,(…一2/:
i;t=山/〉1)
这表明,虽然yt、Xt是非平稳变量,但是它们的线性关系却是平稳的。
因此,对于非平稳变量,只要它们之间是协整的,就可以利用回归分析方法建立模型,称这样的方程为协整回
归方程。
协整关系的经济含义:
协整意味着变量之间存在着一种长期稳定的均衡关系。
在外来“冲击”的影响下,经济变量可能会暂时偏离均衡状态(即原有的比例关系),但是随着时间的推移,偏差将会逐渐消失,系统将会恢复到长期均衡状态。
3.协整与回归模型中变量的选择
一般要求:
(1)y与Xi、X2、、Xk同阶单整;
(2)模型的误差项(即线性组合后的剩余部分)平稳。
设定计量经济模型时,对于“同阶单整”需要注意:
(1)如果只有一个解释变量X,则y和x的单整阶数必须相同。
(2)如果有多个解释变量,则y的单整阶数不能高于任何一个解释变量的单整阶数。
(3)如果有一个解释变量的单整阶数高于y,则模型中至少还要有一个相同阶数的解释变量,这样才可能组合降阶成与y同阶的变量;例如,对于模型:
yt「o「xit」x2t*
如果yt~I
(1),x1t~I
(2),那么只有x2t~I
(2),并且:
必•:
2X2~I
(1)时,y与Xi、X2之间才可能存在协整关系,使得;t~I(0)。
4.协整检验
协整性的检验方法主要有两个,一个是恩格尔和格兰杰
于1987年提出的“两步估计法”,简称“EG两步法”,这种方法适用于检验变量之间只存在一个协整关系的情况。
当变
量之间有多个协整关系时,乔纳森(S.Johansen)在1988、
1991年的两篇论文中提出了一个更为有效的检验方法Johansen检验(具体检验过程在VAR模型中讨论)。
EG两步法检验过程:
第一步:
利用最小二乘法估计模型,并计算相应的残差
序列:
%=%+陥+勺et=笊-(凫+陥)
第二步:
检验残差序列的平稳性:
如果经过DF检验(或
ADF检验)拒绝了存在单位根的原假设,残差序列是平稳序列,则意味着y和x存在着协整关系,称回归模型为协整回归方程;如果接受了存在单位根的原假设,则残差序列是非
平稳的,y和x之间不可能存在协整关系,模型是虚假回归
方程。
第四节误差修正模型
误差修正模型(ErrorCorrectionModel,ECM最初是由Sargan(1964年)提出,后经Davidson、Hendry、Srba和Yeo(1978年)进一步完善,恩格尔和格兰杰又将误差修正模型与协整理论相结合,提出了建立误差修正模型的一般方法(1987年)。
一、误差修正模型的构造
定义:
y-o>xtecm_「;t
其中,ecm是回归模型的残差项, 称该模型为“误差 修正模型”,简称ECM 例如,对于yt的(1,1)阶自回归分布滞后模型: %二'「°Xt」Xm「2%-1」t在模型两端同时减yt-1,并在模型右端「0X2,得: 9Xt(o: i)Xt「(匕-1)%一1 ot+PP (2「1叽「=「=7」 其中, (y-i「o「1人_1);t : 2-1,: 0=C「0)心一-2),: 1二S/(1-: 2)。 记ecg_1二y「1-: o一: 1Xt_1 贝H屮二: o丄Xt•ecmt_1 二、误差修正模型的含义 当yt和xt协整时,设协整回归方程为: yt=X: ”xt•;t 它反映了yt与xt的长期均衡关系,所以称ECM中的ecmii是前一期的“非均衡误差”,称误差修正模型中的ecmz是误差修正项,…2-1是修正系数,由于通常「2“,这样<0; 当ecmtVi>0时(即出现正误差),误差修正项ecmt,0,而ecmn-i<0时(即出现负误差),ecg"0,两者的方向恰好相反,所以,误差修正是一个反向调整过程(负反馈机制)。 误差修正模型有以下几个明确的含义: 1.均衡的偏差调整机制 误差修正模型表明,y的变化由两部分组成,一是解释变量引起的变化,一是对前期非均衡状态的调整。 只要上一期存在非均衡误差,ecmtj",即使t时刻解释变量不发生变化(也人=0),yt还是要进行调整(Ayt=Yecmt/O),而且是一个反向调整过程。 所以,误差修正模型描述了经济系统的动态调整过程一一由不均衡向均衡的转变过程,调整过程中,调整的方向与偏离均衡的方向相反,调整的力度与修正 系数和前期偏差值的大小有关。 2.协整与长期均衡的关系 当变量y和x协整时,设协整回归方程为: 误差项,反映了解释变量x以外的其他因素的影响;由于y、x的协整性,*应该是平稳序列,所以在其他因素的“冲击”下,y可能会偏离长期均衡线jx,但是随着时间的推移, t的影响会逐渐消失,y又会返回到长期均衡状态一一这是利用‘的平稳性解释了协整与长期均衡的关系。 利用误差修正模型可以从另一个角度解释这个关系: 当 y与x存在协整关系斤「0*1心时,误差修正模型描述了y关于这个关系的动态调整过程,在误差调整机制的作用下, y和x始终围绕着ytf0*1%变化,或者说,误差修正模型约束的结果保证了这种均衡关系的持续。 所以,y与x协整 时,系统内在的约束机制使得y与x有长期均衡关系。 3.经济变量的长期与短期变化模型 将协整回归模型和误差修正模型结合起来,可以更加全面地描述y的变化规律: 长期趋势模型: yt*必气 短期波动模型: yt二: o'Xtecmtj;t 协整回归模型描述了y的长期变化规律,: o、: i为长期参数,: i衡量了y与x的长期比例关系。 而误差修正模型描述了y的短期变化规律,其短期波动由x的变化和上期均衡误差决定,i和为短期参数,表示变量之间的短期影响程度和调整关系。 由于误差修正模型的ecm-i中含有长期参数,所以ECM同时反映了变量之间的长期关系和短期效应。 三、误差修正模型的估计 格兰杰表示定理(1987年)指出: 如果非平稳变量之间存在协整关系,则必然可以建立误差修正模型;如果用非平稳变量可以建立误差修正模型,则变量之间一定存在协整关系。 该定理的意义在于从理论上证明了协整与误差修正模型的必然对应关系。 建立ECM的具体步骤为: 1.检验被解释变量y与解释变量x(可以是多个变量)之间的协整性; 2.如果y与x存在协整关系,估计协整回归方程,计算 残差序列et: yt=二Q’oXtet二yt-: ? 一? >Xt 3.将et-1作为一个解释变量,估计误差修正模型: •5=■%'': xt-et4vt 例: 我国城镇居民消费函数


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 误差 修正 模型 35
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 1212中级汽车维修工考试试题三.docx
1212中级汽车维修工考试试题三.docx
-
333教育综合.docx
-
204届毕业生基础知识考试试题 混凝土结构设计 试题.docx
-
100以内加减运算练习题.docx
-
101软件开发工程师JAVA初级考试样卷课件word版本.docx
-
CNN代码理解.docx
-
CPA审计第4章审计抽样下载版讲解.docx
-
hr培训管理系统.docx
-
318安通科科长岗位责任制.docx
-
2044施工现场环境污染的防治措施.docx
-
12371党务平台操作手册.docx
-
Catia百格线生成宏复习过程.docx
-
725kV及以上电压等级支柱瓷绝缘子运行规范.docx
-
1144甑底链板机说明书.docx
-
100个著名初等数学问题.docx
-
201X中学寒假工作计划范文.docx
-
111 生物的特征 练习 人教版七年级上册生物.docx
-
110KV变电所设计变压器翻译.docx
-
9920第二学期学校工作总结.docx
-
0911二级技能解答.docx
-
33415设计说明书正文.docx
-
311教育学基础综合大纲.docx
-
201浙江普通高校招生选考科目考试地理试题和答案解析.docx
-
C语言程序的设计实验实验指导书及答案.docx
-
272相似三角形的性质和判定.docx
-
ACCAHA不稳定型心绞痛和非ST段抬高心肌梗死治疗指南修订版摘要.docx
-
baosteel标准对照 外标含量.docx
-
M1模拟练习题.docx
-
ARM体系课程设计实验报告.docx
-
Android面试题整理.docx
-
gaoer.docx
-
CPⅢ测设方案.docx
-
常见血液检查的项目及临床意义DOC.docx
-
大学语文背诵句子.docx
-
第三章 培训与开发知识要点.docx
-
最新烘焙知识大全新手必备资料.docx
-
输出轴毕业设计说明书.docx
-
第五章资本主义发展的历史进程资料.docx
-
个房产中介必读话术.docx
-
机关新年晚会主持词三篇.docx
-
酒店众筹方案120.docx
-
C语言考试综合题.docx
-
班主任工作总结1.docx
-
笔记本教程1.docx
-
出租车行业分析报告.docx
-
平行线的判定和性质经典题.docx
-
河南省新乡市高三一模文综扫描版含答案.docx
-
小主持培训资料.docx
-
教师授课教案模板.docx
-
沪科八年级物理下册教案全.docx
-
最新各型小儿脑瘫的康复训练方法.docx
