 中科大李厚强图像分析大作业.docx
中科大李厚强图像分析大作业.docx
- 文档编号:8663822
- 上传时间:2023-02-01
- 格式:DOCX
- 页数:16
- 大小:123.77KB
中科大李厚强图像分析大作业.docx
《中科大李厚强图像分析大作业.docx》由会员分享,可在线阅读,更多相关《中科大李厚强图像分析大作业.docx(16页珍藏版)》请在冰豆网上搜索。
中科大李厚强图像分析大作业
区域提取与分析
——图像分析实验
SAHanxinFeng
1、实验目的
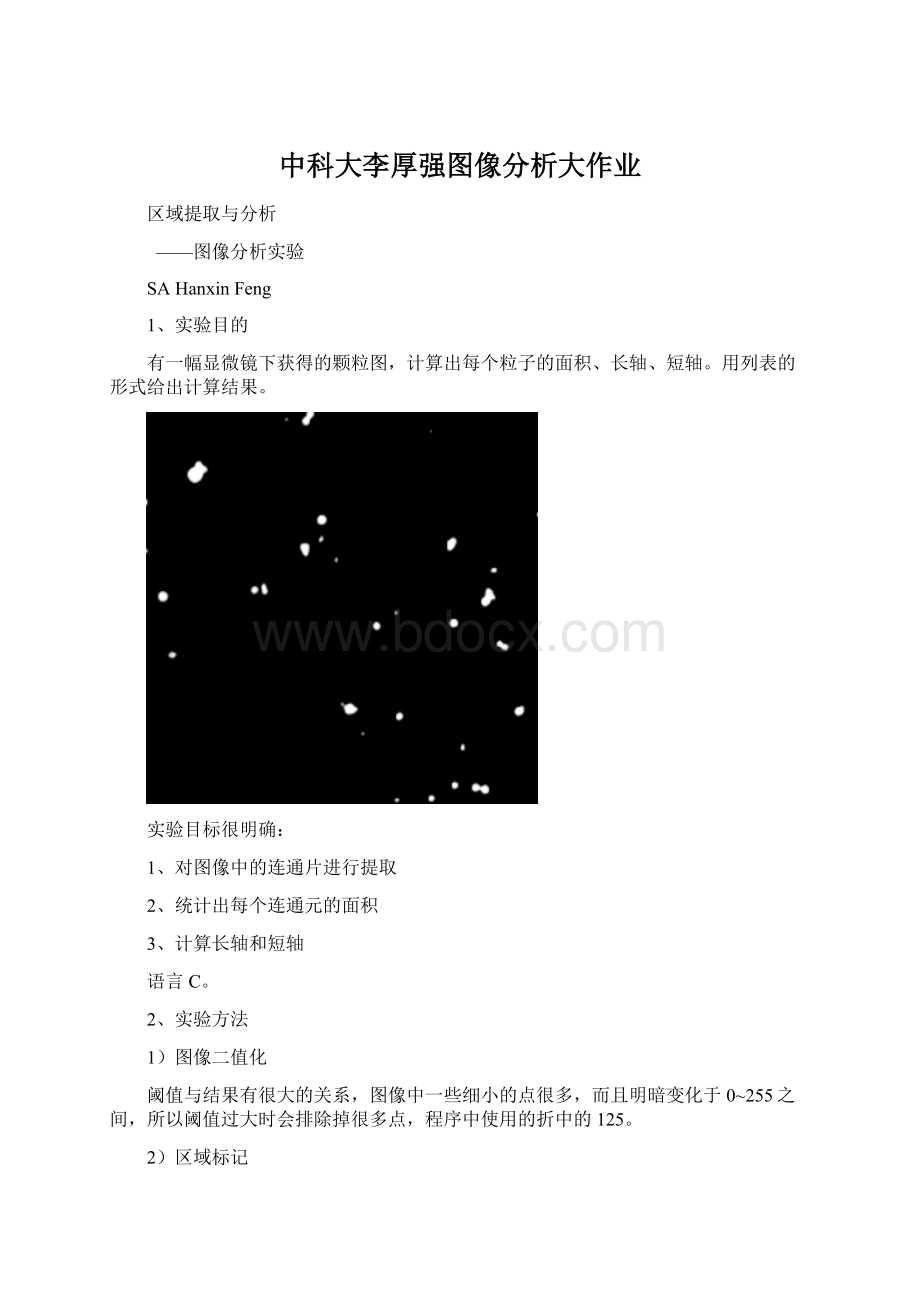
有一幅显微镜下获得的颗粒图,计算出每个粒子的面积、长轴、短轴。
用列表的形式给出计算结果。
实验目标很明确:
1、对图像中的连通片进行提取
2、统计出每个连通元的面积
3、计算长轴和短轴
语言C。
2、实验方法
1)图像二值化
阈值与结果有很大的关系,图像中一些细小的点很多,而且明暗变化于0~255之间,所以阈值过大时会排除掉很多点,程序中使用的折中的125。
2)区域标记
简单起见,考虑4-连通的情况。
本图中,4-连通与8-连通有一点差别,如下一块,着色不同表示不连通。
8连通时,左上角的小块跟大块是连通的。
实际标记时利用了两个模板,前者用于正向扫描,后者用于逆向扫描。
0A001A
B100B0
实验中,正向扫描先考察A,A有标记(无标记,默认是-1),则当前位置表为A_mark,否则,如果B有标记,则标为B_mark,否则,用新的计数;逆向扫描类似。
存储标记的节点如下:
typedefstructPNode{
charpixel;//像素
intmark;//标记
}PNode;
第一次正向扫描结果如下:
(用不同的颜色表示不同的计数)
部分放大:
逆向扫描结果如下:
还有六处没有正确标记的,其中一处如下:
这是可以理解的,比如如下的情况:
-1222222-1
-1-1111-1-1-1
由于逆向扫描时,先考虑右边像素再考虑下方像素,则蓝色下划线的“2”处仍然不变。
第二次正向扫描,得到正确的标定:
(即,每个连通片只有一种颜色)
3)整理标记,统计面积
由于标记本身并没有完全按照计数的顺序排列(只是同一连通片当中的标记相等而已),因此进行一次整理,同时维护一个存储面积和整理过后的计数(依次排列)的链表,如下:
typedefstructNUMNode{
intmark;//标记
intnum;//像素个数(面积)
NUMNode*next;
}NUMNode;
将2)结构中的pix数组中的计数处理后存入链表,由于同一连通片拥有一样的标记,根据标记进行查找,统计出各连通片的面积(包含的像素个数)。
4)长轴计算
重新定义一个结构体数组,每个结构体记录了一个连通片的边缘信息,结构如下:
typedefstructEDGEENode{
inten;//边缘点个数(周长),
intx[300];//边缘点的x坐标,数组长度只要比max{en}大就可以了
inty[300];//边缘点的y坐标
floatlo;//连通片长轴
floatsh;//连通片短轴
}EDGEENode;
维护这一数组是为了方便理解和处理。
数组的有效长度即连通片的个数(本图为30),首先根据计数值提取各个连通片的边缘像素的值以及个数(对于4-连通,边缘像素就是上下左右存在黑色像素),从而,可以将长轴与短轴的计算都局限在一个小范围中。
长轴的获取就是计算边缘点中相距最远的两点的距离,考虑到有很多连通片只有很少的几个像素组成,为了相互区别,因此使用的欧拉距离。
5)短轴计算
短轴的计算其实是一个很复杂的过程,按照定义,我的理解就是,在长轴的垂直方向上,距离最远的两个点的距离。
垂直用斜率k1*k2=-1表示,对于k1或者k2不存在或者为0的情况,单独考虑。
但是,关键问题在于,当长轴确定时,k1的值是精确的,但是计算得到的-1/k1与实际两点间的k2不可以能完全符合,或者说,连通片中甚至都不存在跟长轴完全垂直的两点,因此,短轴的选择是一个取舍问题。
1、如果连通片很大,则这一问题不明显,我们还可以按照取min{k1*k2+1}得到“最为”垂直的点,然后在这些点中寻找相距最远的两点。
2、但是如果连通片很小,则会出现很多细节问题,比如短轴甚至不存在,或者说即使是min{k1*k2+1}对应的k2也显然不是垂直的关系。
因此第二种方法是限定阈值,即fabs(k2+1/k1)<=Threshold,理想情况自然是Threshold=0,但是问题是,差值选多少比较合适;|k1|大时,|k2|很小,反之亦然,所以按照百分比取阈值,实验中使用的(1/fabs(k1))*0.5;即50%。
由于最终结果的好坏与否很难评定,因此实际上我也不知道这么选择是否合适,但是调整阈值大小可以看出变化,当阈值变小(比如用10%),则很多包含像素较少的连通片的短轴都会变为0。
3、结果分析及结论
程序运行前,请将图像放在D:
\目录下,并且命名为1.png。
运行后在D:
\目录下形成2.png,3.png,4.png,即上面贴出的几张图。
实验结果如下:
Mark是标记计数,Edge_n为周长,S_n为面积,long为长轴,short为短轴。
由于只是实现功能,所以代码部分很简陋,也没有定义函数,结构体定义也在SD1SD2.cpp中,只有一个主函数,具体实现都在主函数中。
基于VC6,用到了少量OpenCV的存储读取等功能函数。
4、参考资料
课程PPT
5、C代码
#include
#include
#include
typedefstructPNode{
charpixel;
intmark;
}PNode;
PNodepix[500][500];
typedefstructNUMNode{
intmark;
intnum;
NUMNode*next;
}NUMNode;
typedefstructEDGEENode{
inten;
intx[300];
inty[300];
floatlo;
floatsh;
}EDGEENode;
EDGEENodeEn[100];
voidmain(){
inti,j,k,imax,imin,jmax,jmin;
IplImage*img=cvLoadImage("d:
\\1.png");
intdn=img->nChannels;
intheight=img->height;
intwidth=img->width;
intwidth0=img->widthStep;
char*p=img->imageData;
imin=0;
jmin=0;
imax=width;
jmax=height;
intflag=0;
inti0=0;
inti1=0;
cvThreshold(img,img,125,255,CV_THRESH_BINARY);
cvNamedWindow("img1",CV_WINDOW_AUTOSIZE);
for(j=jmin;j for(i=imin;i pix[j][i].pixel=*(p+width0*j+i*dn); pix[j][i].mark=-1; } } //正向扫描 for(j=jmin;j for(i=imin;i if(pix[j][i].pixel==0)//黑点 continue; i1++; //如果是白点,则考虑AB位置是否有白点,有,则编号 if(j-1>=jmin&&pix[j-1][i].pixel==-1){ pix[j][i].mark=pix[j-1][i].mark; } elseif(i-1>=imin&&pix[j][i-1].pixel==-1){ pix[j][i].mark=pix[j][i-1].mark; } else{ //都黑 i0++; pix[j][i].mark=i0; } } } for(j=jmin;j for(i=imin;i if(pix[j][i].pixel==-1){ *(p+width0*j+i*dn)=(pix[j][i].mark*50)%255; *(p+width0*j+i*dn+1)=(pix[j][i].mark*70)%255; } } } cvSaveImage("d: \\2.png",img); //逆向扫描 for(j=jmax;j>jmin;j--){ for(i=imax;i>imin;i--){ if(pix[j][i].pixel==0)//黑点 continue; //如果是白点,则考虑AB位置是否有白点,有,则编号 if(i+1<=imax&&pix[j][i+1].pixel==-1){ pix[j][i].mark=pix[j][i+1].mark; } elseif(j+1<=jmax&&pix[j+1][i].pixel==-1){ pix[j][i].mark=pix[j+1][i].mark; } } } for(j=jmin;j for(i=imin;i if(pix[j][i].pixel==-1){ *(p+width0*j+i*dn)=(pix[j][i].mark*50)%255; *(p+width0*j+i*dn+1)=(pix[j][i].mark*70)%255; } } } cvSaveImage("d: \\3.png",img); //第二次正向扫描 for(j=jmin;j for(i=imin;i if(pix[j][i].pixel==0)//黑点 continue; //如果是白点,则考虑AB位置是否有白点,有,则编号 if(j-1>=jmin&&pix[j-1][i].pixel==-1){ pix[j][i].mark=pix[j-1][i].mark; } elseif(i-1>=imin&&pix[j][i-1].pixel==-1){ pix[j][i].mark=pix[j][i-1].mark; } } } for(j=jmin;j for(i=imin;i if(pix[j][i].pixel==-1){ *(p+width0*j+i*dn)=(pix[j][i].mark*50)%255; *(p+width0*j+i*dn+1)=(pix[j][i].mark*70)%255; } } } cvSaveImage("d: \\4.png",img); //统计标志和面积 NUMNode*np=NULL; NUMNode*np1,*np2; flag=0; intken; for(j=jmin;j for(i=imin;i if(pix[j][i].pixel==0)//黑点 continue; else{ np1=np; np2=np; flag=0; if(np==NULL){ np=newNUMNode; np->mark=pix[j][i].mark; np->num=1; np->next=NULL; continue; } while(np1! =NULL){ if(np1->mark==pix[j][i].mark){ np1->num++; flag=1;//已经有了 break; } np2=np1; np1=np1->next; } if(flag==0){//没有 np2->next=newNUMNode; np2->next->mark=pix[j][i].mark; np2->next->num=1; np2->next->next=NULL; } } } } //统计En数组,存储各连通元的边缘坐标与周长 for(j=0;j<100;j++){ En[j].en=0; } for(j=jmin;j for(i=imin;i if(pix[j][i].pixel==0)//黑点 continue; else{ np1=np; np2=np; flag=0; while(np1! =NULL){ if(np1->mark==pix[j][i].mark){ if((j-1>jmin&&pix[j-1][i].pixel==0)||(i-1>imin&&pix[j][i-1].pixel==0)||(j+1 //周围有黑点,则说明是边界点 ken=En[np1->mark-1].en; En[np1->mark-1].x[ken]=i; En[np1->mark-1].y[ken]=j; En[np1->mark-1].en++; } break; } np2=np1; np1=np1->next; } } } } np1=np; i=1; while(np1! =NULL){ En[i-1].en=En[np1->mark-1].en; for(j=0;j En[i-1].x[j]=En[np1->mark-1].x[j]; En[i-1].y[j]=En[np1->mark-1].y[j]; } np1->mark=i; np1=np1->next; i++; } i0=i-1; //i-1即为连通元个数,也是En数组的长度 for(j=jmin;j for(i=imin;i if(pix[j][i].pixel==-1){ *(p+width0*j+i*dn)=(pix[j][i].mark*50)%255; *(p+width0*j+i*dn+1)=(pix[j][i].mark*70)%255; } } } cvShowImage("img1",img); printf("白像素个数: %d\n",i1); intdistance,dmax=0,dx,dy; intlx1,lx2,ly2,ly1,y,x; floatk1,k2,dk2; //利用En数组统计各连通元长轴 for(i=0;i dmax=0; for(j=0;j for(k=0;k dx=En[i].x[j]-En[i].x[k]; dy=En[i].y[j]-En[i].y[k]; if((distance=dx*dx+dy*dy)>dmax){ dmax=distance; lx1=En[i].x[j]; lx2=En[i].x[k]; ly1=En[i].y[j]; ly2=En[i].y[k]; } } } En[i].lo=(float)pow((double)dmax,0.5); dmax=0; if(En[i].lo==0){ //长轴为0 En[i].sh=0; continue; } elseif(lx2==lx1){ //长轴为y轴方向 dmax=0; for(j=0;j y=En[i].y[j]; x=En[i].x[j]; for(k=0;k if(En[i].y[k]==y){ if((dx=abs(En[i].x[k]-x))>dmax) dmax=dx; } } } En[i].sh=dmax; continue; } elseif(ly2==ly1){ //长轴为x轴方向 dmax=0; for(j=0;j y=En[i].y[j]; x=En[i].x[j]; for(k=0;k if(En[i].x[k]==x){ if((dx=abs(En[i].y[k]-y))>dmax) dmax=dx; } } } En[i].sh=dmax; continue; } else k1=(float)(ly2-ly1)/(lx2-lx1); dmax=0; k2=0; dk2=(1/fabs(k1))*0.5; for(j=0;j for(k=0;k if(k==j) continue; k2=(float)(En[i].y[k]-En[i].y[j])/(En[i].x[k]-En[i].x[j]); //printf("%0.1f",k1*k2); if(fabs(k2+1/k1)<=dk2){ //k1*k2=-1,则垂直 dx=En[i].x[j]-En[i].x[k]; dy=En[i].y[j]-En[i].y[k]; if((distance=dx*dx+dy*dy)>dmax){ dmax=distance; lx1=En[i].x[j]; lx2=En[i].x[k]; ly1=En[i].y[j]; ly2=En[i].y[k]; } } } } En[i].sh=(float)pow((double)dmax,0.5); } np1=np; printf("Mark\tEdge_n\tS_n\tlong\tshort\n"); while(np1! =NULL){ printf("%d\t%d\t%d\t%0.1f\t%0.1f\n",np1->mark,En[np1->mark-1].en,np1->num,En[np1->mark-1].lo,En[np1->mark-1].sh); np1=np1->next; } cvWaitKey(0); }


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 中科大李厚强 图像 分析 作业
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 广东省普通高中学业水平考试数学科考试大纲Word文档下载推荐.docx
广东省普通高中学业水平考试数学科考试大纲Word文档下载推荐.docx
-
计算题测试文档格式.docx
-
会计年终总结范文精选10篇Word文件下载.docx
-
基坑支护及降排水方案Word格式文档下载.docx
-
古代诗歌鉴赏一剪梅学案Word文档格式.docx
-
国标舞考级Word文件下载.docx
-
机电工程质量验收规范是什么Word文档下载推荐.docx
-
技术员工作自我评价文档格式.docx
-
交警支队车棚改造工程施工合同文档格式.docx
-
护士变更注册申请审核表与示范文本Word文档下载推荐.docx
-
最新学校新冠肺炎疫情防控应急预案Word文件下载.docx
-
GB50204钢筋规范之欧阳总创编Word格式文档下载.docx
-
《半期整改措施》Word格式.docx
-
诊断 症状学腰背痛关节痛汇总.docx
-
英美文学欣赏The Analysis of Shelleys Ode to the West Wind.docx
-
增值税营改增所得税消费税车购税测试题.docx
-
整理二级建造师管理真题.docx
-
英语三级重点高频词汇导入背单词APP使用.docx
-
浙教版学年九年级数学上册第2章测试题及答案.docx
-
证件照教学设计方案.docx
-
优品课件之《从锁国走向开国的日本》教案.docx
-
整理北京交通大学万用表组装实验报告.docx
-
质量管理计划.docx
-
有机化学鉴别.docx
-
整理照明灯饰灯具行业分类英语词汇.docx
-
濉溪县城市总体规划公示.docx
-
智能化工程质量验收记录表.docx
-
学生会纪检部工作总结.docx
-
幼儿园保教主任发言稿.docx
-
跆拳道协会工作总结.docx
-
中国茶叶店连锁市场竞争分析与竞争战略研究报告.docx
-
学宪法讲宪法主题演讲稿800字精选5篇弘扬宪法精神演讲稿5篇.docx
-
最新冬病夏治可行性报告及技术等杨华 3500字word范文模板 17页Word下载.docx
-
中间站监控设备安装检验批质量验收记录表Word文档下载推荐.docx
-
最新苏教版语文四年级上册看拼音写词语Word下载.docx
-
最新入党思想汇报 入党积极分子思想报告范文思想汇报文档五篇 3Word格式文档下载.docx
-
《安徽省中考语文必背优秀古诗文50篇和课外读物书目》Word文档格式.docx
-
装饰装修资料整理需要哪些表格收集哪些资料及注意事项Word文件下载.docx
-
最新安全知识考试题库300题含答案LZWord文档格式.docx
-
最新中考物理 透镜的应用专题复习 配套练习Word格式文档下载.docx
-
U大师一键备份还原系统操作步骤Word格式.docx
-
二年级上册美术教学设计文档格式.docx
-
最新管理学基础复习资料很有用的哦 精品Word下载.docx
-
作文元旦演讲稿500字七篇文档格式.docx
-
中考英语易错题 学生版Word文档下载推荐.docx
-
中考试题九年级上册期末考试题文档格式.docx
-
《四个太阳》案例分析Word文档下载推荐.docx
-
《护理解剖学》试题文档格式.docx
-
最新苏少版小学音乐一年级上册教案全册教案文档格式.docx
-
中考英语作文分类指导13看图作文Word文件下载.docx
-
03评审表样表教育系列A4正反面打印Word文档格式.docx
