 牛头刨床机械原理课程设计2点和8点.docx
牛头刨床机械原理课程设计2点和8点.docx
- 文档编号:7860147
- 上传时间:2023-01-26
- 格式:DOCX
- 页数:13
- 大小:142.79KB
牛头刨床机械原理课程设计2点和8点.docx
《牛头刨床机械原理课程设计2点和8点.docx》由会员分享,可在线阅读,更多相关《牛头刨床机械原理课程设计2点和8点.docx(13页珍藏版)》请在冰豆网上搜索。
牛头刨床机械原理课程设计2点和8点
课程设计说明书—牛头刨床
1.机构简介
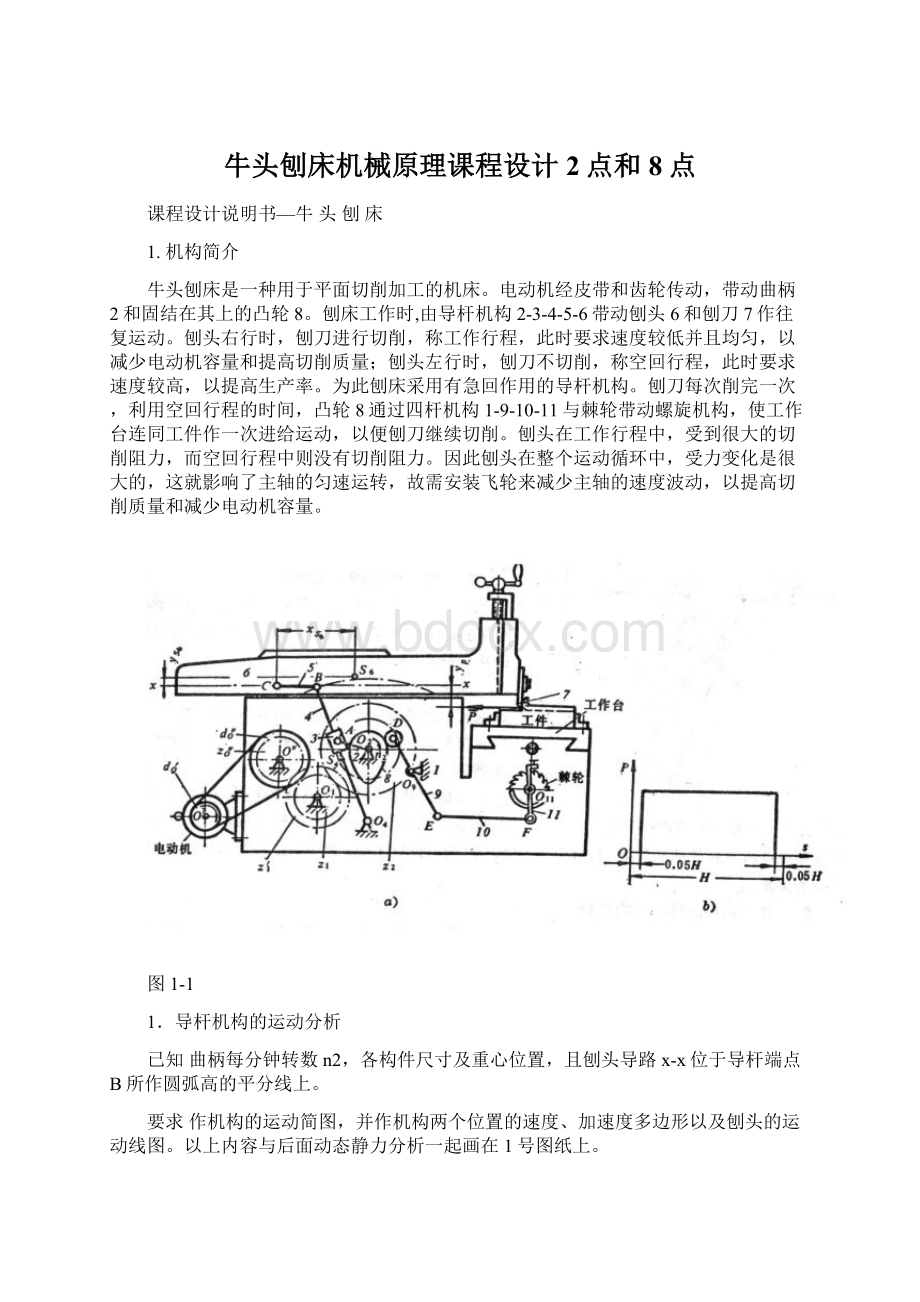
牛头刨床是一种用于平面切削加工的机床。
电动机经皮带和齿轮传动,带动曲柄2和固结在其上的凸轮8。
刨床工作时,由导杆机构2-3-4-5-6带动刨头6和刨刀7作往复运动。
刨头右行时,刨刀进行切削,称工作行程,此时要求速度较低并且均匀,以减少电动机容量和提高切削质量;刨头左行时,刨刀不切削,称空回行程,此时要求速度较高,以提高生产率。
为此刨床采用有急回作用的导杆机构。
刨刀每次削完一次,利用空回行程的时间,凸轮8通过四杆机构1-9-10-11与棘轮带动螺旋机构,使工作台连同工件作一次进给运动,以便刨刀继续切削。
刨头在工作行程中,受到很大的切削阻力,而空回行程中则没有切削阻力。
因此刨头在整个运动循环中,受力变化是很大的,这就影响了主轴的匀速运转,故需安装飞轮来减少主轴的速度波动,以提高切削质量和减少电动机容量。
图1-1
1.导杆机构的运动分析
已知曲柄每分钟转数n2,各构件尺寸及重心位置,且刨头导路x-x位于导杆端点B所作圆弧高的平分线上。
要求作机构的运动简图,并作机构两个位置的速度、加速度多边形以及刨头的运动线图。
以上内容与后面动态静力分析一起画在1号图纸上。
1.1设计数据
牛头刨床是一种用于平面切削加工的机床。
电动机经皮带和齿轮传动,带动曲柄2和固结在其上的凸轮8。
刨床工作时,由导杆机构2-3-4-5-6带动刨头6和刨刀7作往复运动。
刨头右行时,刨刀进行切削,称工作切削。
此时要求速度较低且均匀,以减少电动机容量和提高切削质量;刨头左行时,刨刀不切削,称空回行程,此时要求速度较高,以提高生产效率。
为此刨床采用急回作用得导杆机构。
刨刀每切削完一次,利用空回行程的时间,凸轮8通过四杆机构1-9-10-11与棘轮机构带动螺旋机构,使工作台连同工件作一次进给运动,以便刨刀继续切削。
刨头在工作行程中,受到很大的切削阻力,而空回行程中则没有切削阻力。
因此刨头在整个运动循环中,受力变化是很大的,这就影响了主轴的匀速运转,故需装飞轮来减小株洲的速度波动,以减少切削质量和电动机容量。
设计数据:
设计
内容
导杆机构的运动分析
导杆机构的动态静力分析
符号
n2
L0204
L02A
L04B
LBC
L04S4
XS6
YS6
G4
G6
P
YP
JS4
单位
r/min
mm
N
mm
kgm2
方
案
Ⅰ
60
380
110
540
0.25
L04B
0.5
L04B
240
50
200
700
7000
80
1.1
Ⅱ
64
350
90
580
0.3
L04B
0.5
L04B
200
50
220
800
9000
80
1.2
Ⅲ
72
430
110
810
0.36
L04B
0.5
L04B
180
40
220
620
8000
100
1.2
1.2曲柄位置的确定
曲柄位置图的作法为:
取1和8’为工作行程起点和终点所对应的曲柄位置,1’和7’为切削起点和终点所对应的曲柄位置,其余2、3…12等,是由位置1起,顺ω2方向将曲柄圆作12等分的位置(如下图)。
图1-2
选择表Ⅰ中方案Ⅱ
取第2位置和第8位置(如下图1-3)。
图1-3
1.3速度分析以速度比例尺µ=(0.01m/s)/mm和加速度比例尺µa=(0.05m/s²)/mm用相对运动的图解法作该两个位置的速度多边形和加速度多边形如下图1-4,1-5,并将其结果列入表格(1-2)
表格1-1
位置
未知量
方程
2和8杆
VA4
υA4=υA3+υA4A3
大小?
√?
方向⊥O4A⊥O2A∥O4B
VC5
υC5=υB5+υC5B5
大小?
√?
方向∥XX⊥O4B⊥BC
aA4
aA4=
+aA4τ=aA3n+aA4A3K+aA4A3r
大小:
ω42lO4A?
√2ω4υA4A3?
方向:
B→A⊥O4BA→O2⊥O4B(向左)∥O4B(沿导路)
ac5
VB5=VB4
ac5=aB5+ac5B5
大小?
√?
方向∥XX√⊥BC
2杆速度图:
如图1-4
图1-4
2杆加速度图:
如图1-5
图1-5
8杆速度图:
如图1-6
8杆加速度图:
如1-7
表格(1-2)
位置
要求
图解法结果
2
Vc5(m/s)
0.4169272525
ac5(m/s²)
4.137861508
8
Vc5(m/s)
0.0035326781
Ac5(m/s²)
6.6947598675
各点的速度,加速度分别列入表1-3,1-4中
表1-3
项目
位置
ω2
ω4
VA4A3
VA4
Vc5
2
6.70206432
1.2303581
0.53160027
0.28501622
0.41692725
8
6.70206432
2.2513116
0.60318215
0.00209391
0.00353267
单位
1rad/s
1rad/s
m/s
表1-4
项目
位置
aA4
aA3
aBC
2
2.780570524
0.211867341
2.77248709
4.04258995
0.638601108
4.137861508
8
3.9678130989
0.000012974975
3.9678130
4.04258502
1.7577905926
6.69475986
单位
1.4导杆机构的动态静力分析
已知各构件的重量G(曲柄2、滑块3和连杆5的重量都可忽略不计),导杆4绕重心的转动惯量Js4及切削力P的变化规律。
要求求各运动副中反作用力及曲柄上所需要的平衡力矩。
以上内容做在运动分析的同一张图纸上。
首先按杆组分解实力体,用力多边形法决定各运动副中的作用反力和加于曲柄上的平衡力矩。
参考图1-3,将其分解为5-6杆组示力体,3-4杆组示力体和曲柄。
图2-1
2.1矢量图解法:
2.1.15-6杆组示力体共受五个力,分别为P、G6、Fi6、R16、R45,其中R45和R16方向已知,大小未知,切削力P沿X轴方向,指向刀架,重力G6和支座反力F16均垂直于质心,R45沿杆方向由C指向B,惯性力Fi6大小可由运动分析求得,方向水平向左。
选取比例尺μ=(10N)/mm,作力的多边形。
将方程列入表2-1。
U=10N/mm
已知P=0N,G6=800N,
又ac=ac5=6.6947598675m/s2,那么我们可以计算
FI6=-G6/g×ac=-800/10×6.6947598675=-535.580789
又ΣF=P+G6+FI6+FR45+FR16=0,
作为多边行如图1-7所示
图1-7
图1-7力多边形可得:
FR45=536.4475789N
FR16=830.648267N
分离3,4构件进行运动静力分析,杆组力体图如图1-8所示,
2.1.2对3-4杆组示力体分析
已知:
F54=-F45=536.4475789N,G4=220N
aS4=aA4·lO4S4/lO4A=4.60918918m/s2,
βS4=15.8937558rad/s2
由此可得:
FI4=-G4/g×aS4=-220/10×4.60918918N=-101.4202162N
MS4=-JS4·βS4=-1.2×15.8937558N·m=-19.072507N·m
在图1-8中,对O4点取矩得:
MO4=G4x*lo4B+FIx*lo4B+FR54x*lo4B+FR24x*lo4B+M=0
代入数据,解得
FR24=534.961814N
2.1.3对曲柄分析,共受2个力,分别为R32,R12和一个力偶M,由于滑块3为二力杆,所以R32=R34,方向相反,因为曲柄2只受两个力和一个力偶,所以FR12与FR32等大反力,由此可以求得:
h2=0.09m,则,
对曲柄列平行方程有,
ΣMO2=M-F42·h2=0即
即M=48.1665633N·m


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 牛头 刨床 机械 原理 课程设计
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 铝散热器项目年度预算报告.docx
铝散热器项目年度预算报告.docx
-
牛津上海版通用小学英语三年级上册Unit 12同步练习2II 卷.docx
-
论我国私营企业员工激励机制.docx
-
人教版五年级品德与社会上册全册教案.docx
-
开学啦国旗下讲话稿三分钟.docx
-
露天采矿学复习题.docx
-
六年级英语教师年度考核个人总结.docx
-
某路站综合体项PC吊装施工方案.docx
-
人教版九年级历史上册期末考试试题一套.docx
-
隆昌妇幼保健院.docx
-
芦二矿抽采达标中长期规划.docx
-
看拼音写词语.docx
-
模拟磁盘调度算法系统的设计毕业设计.docx
-
每周一条名言警句或一首诗词.docx
-
棉花膜下滴灌示范工程设计总结报告.docx
-
九年级化学教案第十单元酸和碱教案新人教版.docx
-
宁波市水资源公报.docx
-
农业实用技术培训工作意见与农业局上半年工作总结范例两篇汇编.docx
-
平行线的判定.docx
-
内部会计管理制度11成本核算制度.docx
-
盘扣式脚手架支撑方案.docx
-
旅游规划模板.docx
-
煤矿大本大专毕业设计大采高综采工作面作业规程.docx
-
美学选择题整理课件资料.docx
-
名家论腹泻慢性肠炎.docx
-
宁夏银川市第一中学学年高一上学期期中考试地理试题解析解析版.docx
-
年产吨精密纤维纸项目建设建议书.docx
-
农技推广中心工作总结.docx
-
彭宇案的法逻辑批判.docx
-
宁夏仕奇房产网发布份房地产交易情况.docx
-
项目推荐书智能温控节能系统.docx
-
区县节日期间加强消防安全讲话稿与区发改委领导班子述职述廉报告汇编.docx
-
高一班主任评语300字Word格式.docx
-
加油站职业卫生管理制度培训文件Word格式.docx
-
检验科PCR室作业指导书Word下载.docx
-
国际金融习题1Word文件下载.docx
-
高中历史33《克里特文明的重现》教案新人教版选修5Word文档下载推荐.docx
-
高考数学理科一轮复习简单的线性规划问题学案附答案文档格式.docx
-
国债期货推出的意义及影响分析文档格式.docx
-
国际商务谈判历年考试试题Word文档下载推荐.docx
-
高中生物人教课标版必修3期末综合复习教学设计Word格式文档下载.docx
-
国库知识竞赛抢答题库及答案共80题文档格式.docx
-
建设工程定额体系框架整理Word文档格式.docx
-
湖北省黄冈市黄冈中学高中英语UnitTwoWorkingtheland单元教学细目与单元检测新人教版必修4新Word格式文档下载.docx
-
华南农业大学经济学专业实习总结报告范文模板Word格式文档下载.docx
-
寒假二年级学生家庭学习计划表Word文档格式.docx
-
画一扇窗给自己命题作文写作指导Word文件下载.docx
-
个人述职报告4篇Word格式.docx
-
黑龙江中医药大学级中西医临床金匮要略试题Word文档下载推荐.docx
-
海南省万宁中学高二化学上册期末试题Word下载.docx
-
计算机组成原理习题集文档格式.docx
