 ABB机器人程序指令汇总.docx
ABB机器人程序指令汇总.docx
- 文档编号:7613220
- 上传时间:2023-01-25
- 格式:DOCX
- 页数:6
- 大小:25.03KB
ABB机器人程序指令汇总.docx
《ABB机器人程序指令汇总.docx》由会员分享,可在线阅读,更多相关《ABB机器人程序指令汇总.docx(6页珍藏版)》请在冰豆网上搜索。
ABB机器人程序指令汇总
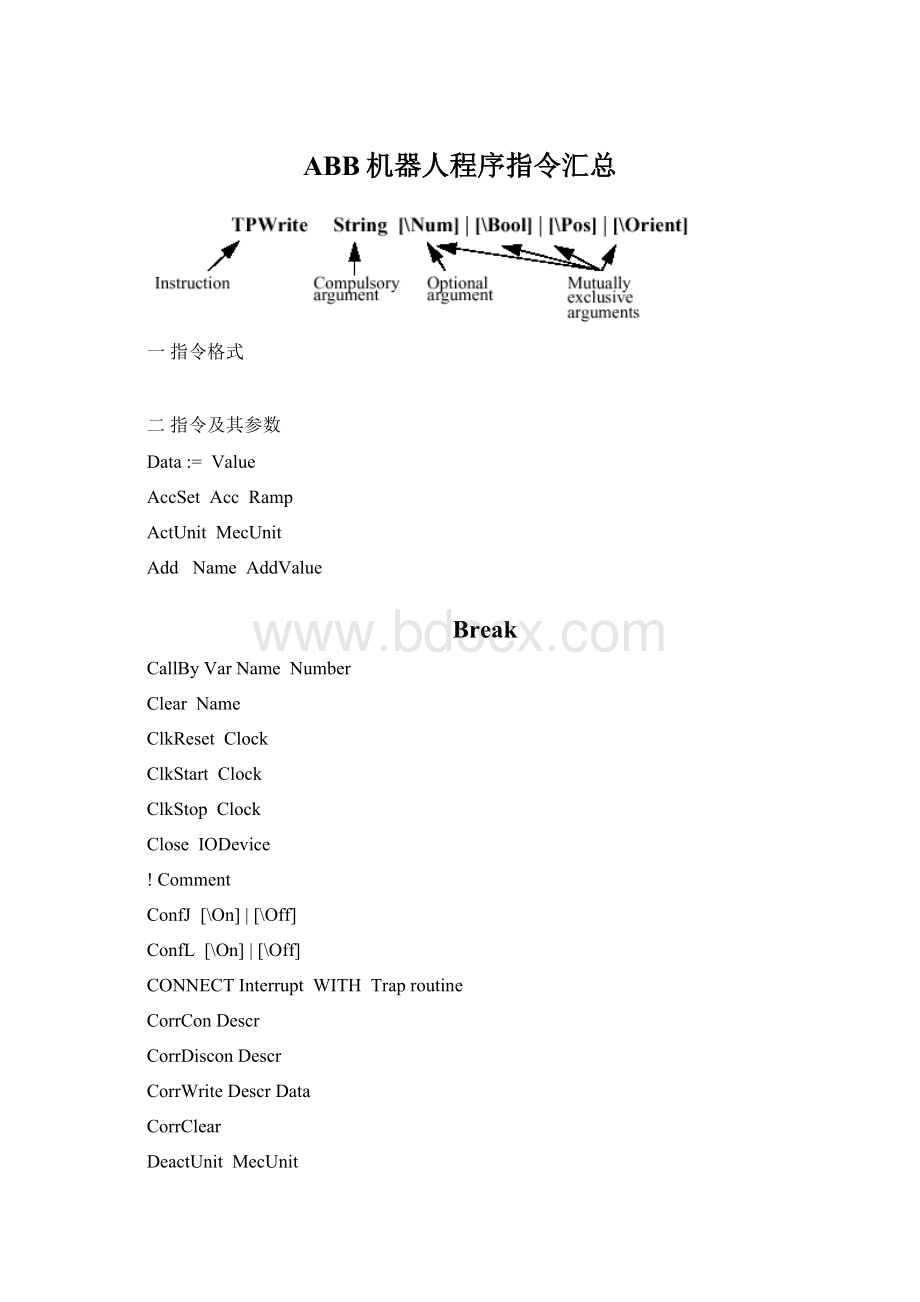
一指令格式
二指令及其参数
Data:
=Value
AccSetAccRamp
ActUnitMecUnit
AddNameAddValue
Break
CallByVarNameNumber
ClearName
ClkResetClock
ClkStartClock
ClkStopClock
CloseIODevice
!
Comment
ConfJ[\On]|[\Off]
ConfL[\On]|[\Off]
CONNECTInterruptWITHTraproutine
CorrConDescr
CorrDisconDescr
CorrWriteDescrData
CorrClear
DeactUnitMecUnit
DecrName
EOffsSetEaxOffsErrWrite[\W]HeaderReason
[\RL2][\RL3][\RL4]
Exit
ExitCycle
FORLoopcounterFROMStartvalueTOEndvalue
[STEPStepvalue]DO...ENDFOR
GOTOLabel
GripLoadLoad
IDeleteInterrupt
IFCondition...
IFConditionTHEN...
{ELSEIFConditionTHEN...}
[ELSE...]
ENDIF
IncrName
IndAMoveMecUnitAxis[\ToAbsPos]|[\ToAbsNum]Speed[\Ramp]
IndCMoveMecUnitAxisSpeed[\Ramp]
IndDMoveMecUnitAxisDeltaSpeed[\Ramp]
IndResetMecUnitAxis[\RefPos]|[\RefNum]|[\Short]|[\Fwd]|[\Bwd]|[\Old]
IndRMoveMecUnitAxis[\ToRelPos]|[\ToRelNum]|[\Short]|[\Fwd]|[\Bwd]Speed[\Ramp]
InvertDOSignal
IODisableUnitNameMaxTime
IOEnableUnitNameMaxTime
ISignalDI[\Single]SignalTriggValueInterrupt
ISignalDO[\Single]SignalTriggValueInterrupt
ISleepInterruptITimer[\Single]TimeInterrupt
IVarValueVarNoValue,Interrupt
IWatchInterrupt
Label:
MoveAbsJ[\Conc]ToJointPosSpeed[\V]|[\T]Zone[\Z]Tool
[\WObj]
MoveC[\Conc]CirPointToPointSpeed[\V]|[\T]Zone[\Z]Tool[
\WObj]
MoveJ[\Conc]ToPointSpeed[\V]|[\T]Zone[\Z]Tool[\WObj]
MoveL[\Conc]ToPointSpeed[\V]|[\T]Zone[\Z]Tool[\WObj]
OpenObject[\File]IODevice[\Read]|[\Write]|[\Append]|[\Bin]
PathResolValue
PDispOn[\Rot][\ExeP]ProgPointTool[\WObj]
PDispSetDispFrame
PulseDO[\PLength]Signal
RAISE[Errorno]
ResetSignal
RETURN[Returnvalue]
RewindIODevice
SearchC[\Stop]|[\PStop]|[\Sup]SignalSearchPointCirPoint
ToPointSpeed[\V]|[\T]Tool[\WObj]
SearchL[\Stop]|[\PStop]|[\Sup]SignalSearchPointToPoint
Speed[\V]|[\T]Tool[\WObj]
SetSignal
SetAOSignalValueSetDO[\SDelay]SignalValue
SetGOSignalValue
SingArea[\Wrist]|[\Arm]|[\Off]
SoftActAxisSoftness[\Ramp]
Stop[\NoRegain]
TESTTestdata{CASETestvalue{,Testvalue}:
...}
[DEFAULT:
...]ENDTEST
TPReadFKAnswerStringFK1FK2FK3FK4FK5[\MaxTime]
[\DIBreak][\BreakFlag]
TPReadNumAnswerString[\MaxTime][\DIBreak][\BreakFlag]
TPShowWindow
TPWriteString[\Num]|[\Bool]|[\Pos]|[\Orient]
TriggCCirPointToPointSpeed[\T]Trigg_1[\T2][\T3][\T4]
ZoneTool[\WObj]
TriggIntTriggDataDistance[\Start]|[\Time]Interrupt
TriggIOTriggDataDistance[\Start]|[\Time][\DOp]|[\GOp]
|[\AOp]SetValue[\DODelay]|[\AORamp]
TriggJToPointSpeed[\T]Trigg_1[\T2][\T3][\T4]ZoneTool[\WObj]
TriggLToPointSpeed[\T]Trigg_1[\T2][\T3][\T4]ZoneTool[\WObj]
TuneServoMecUnitAxisTuneValue
TuneServoMecUnitAxisTuneValue[\Type]
UnLoadFilePath[\File]
VelSetOverrideMax
WaitDISignalValue[\MaxTime][\TimeFlag]
WaitDOSignalValue[\MaxTime][\TimeFlag]
WaitTime[\InPos]TimeWaitUntil[\InPos]Cond[\MaxTime][\TimeFlag]
WHILEConditionDO...ENDWHILE
WriteIODeviceString[\Num]|[\Bool]|[\Pos]|[\Orient][\NoNewLine]
WriteBinIODeviceBufferNChar
WriteStrBinIODeviceStr
WZBoxDef[\Inside]|[\Outside]ShapeLowPointHighPoint
WZCylDef[\Inside]|[\Outside]ShapeCentrePointRadius
WZDisableWorldZone
WZDOSet[\Temp]|[\Stat]WorldZone[\Inside]|[\Before]
SignalSetValue
WZEnableWorldZone
WZFreeWorldZone
WZLimSup[\Temp]|[\Stat]WorldZoneShape
WZSphDef[\Inside]|[\Outside]ShapeCentrePointRadius
三函数及其参数
Abs(Input)
ACos(Value)
AOutput(Signal)
ArgName(Parameter)
ASin(Value)
ATan(Value)
ATan2(YX)
ByteToStr(ByteData[\Hex]|[\Okt]|[\Bin]|[\Char])
ClkRead(Clock)CorrRead
Cos(Angle)
CPos([Tool][\WObj])
CRobT([Tool][\WObj])
DefDFrame(OldP1OldP2OldP3NewP1NewP2NewP3)
DefFrame(NewP1NewP2NewP3[\Origin])
Dim(ArrParDimNo)
DOutput(Signal)
EulerZYX([\X]|[\Y]|[\Z]Rotation)
Exp(Exponent)
GOutput(Signal)
GetTime([\WDay]|[\Hour]|[\Min]|[\Sec])
IndInposMecUnitAxis
IndSpeedMecUnitAxis[\InSpeed]|[\ZeroSpeed]
IsPers(DatObj)
IsVar(DatObj)
MirPos(PointMirPlane[\WObj][\MirY])
NumToStr(ValDec[\Exp])
Offs(PointXOffsetYOffsetZOffset)
OrientZYX(ZAngleYAngleXAngle)
ORobT(OrgPoint[\InPDisp]|[\InEOffs])
PoseInv(Pose)
PoseMult(Pose1Pose2)
PoseVect(PosePos)
Pow(BaseExponent)Present(OptPar)
ReadBin(IODevice[\Time])
ReadMotor[\MecUnit]Axis
ReadNum(IODevice[\Time])
ReadStr(IODevice[\Time])
RelTool(PointDxDyDz[\Rx][\Ry][\Rz])
Round(Val[\Dec])
Sin(Angle)
Sqrt(Value)
StrFind(StrChPosSet[\NotInSet])
StrLen(Str)
StrMap(StrFromMapToMap)
StrMatch(StrChPosPattern)
StrMemb(StrChPosSet)
StrOrder(Str1Str2Order)
StrPart(StrChPosLen)
StrToByte(ConStr[\Hex]|[\Okt]|[\Bin]|[\Char])
StrToVal(StrVal)
Tan(Angle)
TestDI(Signal)
Trunc(Val[\Dec])
ValToStr(Val)


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- ABB 机器人 程序 指令 汇总
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 对中国城市家庭的教育投资行为的理论和实证研究.docx
对中国城市家庭的教育投资行为的理论和实证研究.docx
-
二年级下册数学练习题大全.docx
-
二十年后回故乡的优秀作文.docx
-
软基换填施工方案.docx
-
《黑白装饰画》教案.docx
-
课堂教学改革实施方案5篇.docx
-
返璞归真简约致美解读《给予树》教学设计语文.docx
-
离职证明范本精选多篇.docx
-
《天局》全文.docx
-
我害怕作文集合15篇.docx
-
伏魔战记39详细攻略.docx
-
幼儿园学期计划.docx
-
雅思分类打印版Word格式文档下载.docx
-
年产1万吨竹子纤维加工项目可行性研究报告文档格式.docx
-
电商产业化项目投资经营商业计划书Word文件下载.docx
-
医学多媒体课件的设计与制作Word文档格式.docx
-
中学生中秋节想象作文Word格式.docx
-
等保20之漏洞扫描系统技术方案建议书Word文档格式.docx
-
培训学校个人工作计划模板5篇Word格式.docx
-
北京各区二模试题分类汇编文言文阅读Word文档下载推荐.docx
-
不同职业病危害因素的防护常识Word格式文档下载.docx
-
一年级上册同音形近字练习汇总Word文档格式.docx
-
班级家长会上班主任教师讲话稿Word下载.docx
-
科斯塔环载波恢复Word文件下载.docx
-
浙教义务版六年级语文下册教案 花潮Word文件下载.docx
-
集成电路设计与集成系统专业Word格式文档下载.docx
-
开工第一课专题讲座观后感文档格式.docx
-
东城区学年第一学期高三期末化学试题及答案Word格式文档下载.docx
-
苏教版六年级语文下册第七单元测试题Word格式文档下载.docx
-
学长征精神做红色传人活动方案文档格式.docx
-
读书笔记150字30篇文档格式.docx
-
中级经济法考前必背法条精华版备考资料Word格式.docx
-
飞机机体修理复习题及答案docWord下载.docx
-
更换地线作业指导书Word格式文档下载.docx
-
高考上海市届高考压轴卷数学试题含答案和解析文档格式.docx
-
发展规划书Word文档格式.docx
-
电算化会计形成性考核册答案Word下载.docx
-
二极管及三极管电路符号大全Word文档格式.docx
-
发育生物学 2A肽及其在多基因共表达中的应用Word格式文档下载.docx
-
服务员岗位职责4篇Word文件下载.docx
-
风电场首次及土建工程质量监督检查记录表Word格式文档下载.docx
-
非主流新年祝福语Word文档下载推荐.docx
-
高中历史老师新学期的工作计划Word文档下载推荐.docx
-
高三化学复习易错卷二基本理论卷Word格式.docx
-
服装职业规划计划方Word文档格式.docx
-
二年级音乐出发教案Word文档格式.docx
-
短缺药品管理制度及应急预警机制全套资料Word文档格式.docx
-
风会记得一朵花的香读后感15篇文档格式.docx
-
法法规Word文档格式.docx
-
东北大学数字图像处理实验Word文件下载.docx
-
高效管理方法项目制运营团队管理文档格式.docx
