 巨磁电阻效应及其应用数据处理.docx
巨磁电阻效应及其应用数据处理.docx
- 文档编号:6955343
- 上传时间:2023-01-13
- 格式:DOCX
- 页数:9
- 大小:18.30KB
巨磁电阻效应及其应用数据处理.docx
《巨磁电阻效应及其应用数据处理.docx》由会员分享,可在线阅读,更多相关《巨磁电阻效应及其应用数据处理.docx(9页珍藏版)》请在冰豆网上搜索。
巨磁电阻效应及其应用数据处理
五、实验数据及处理
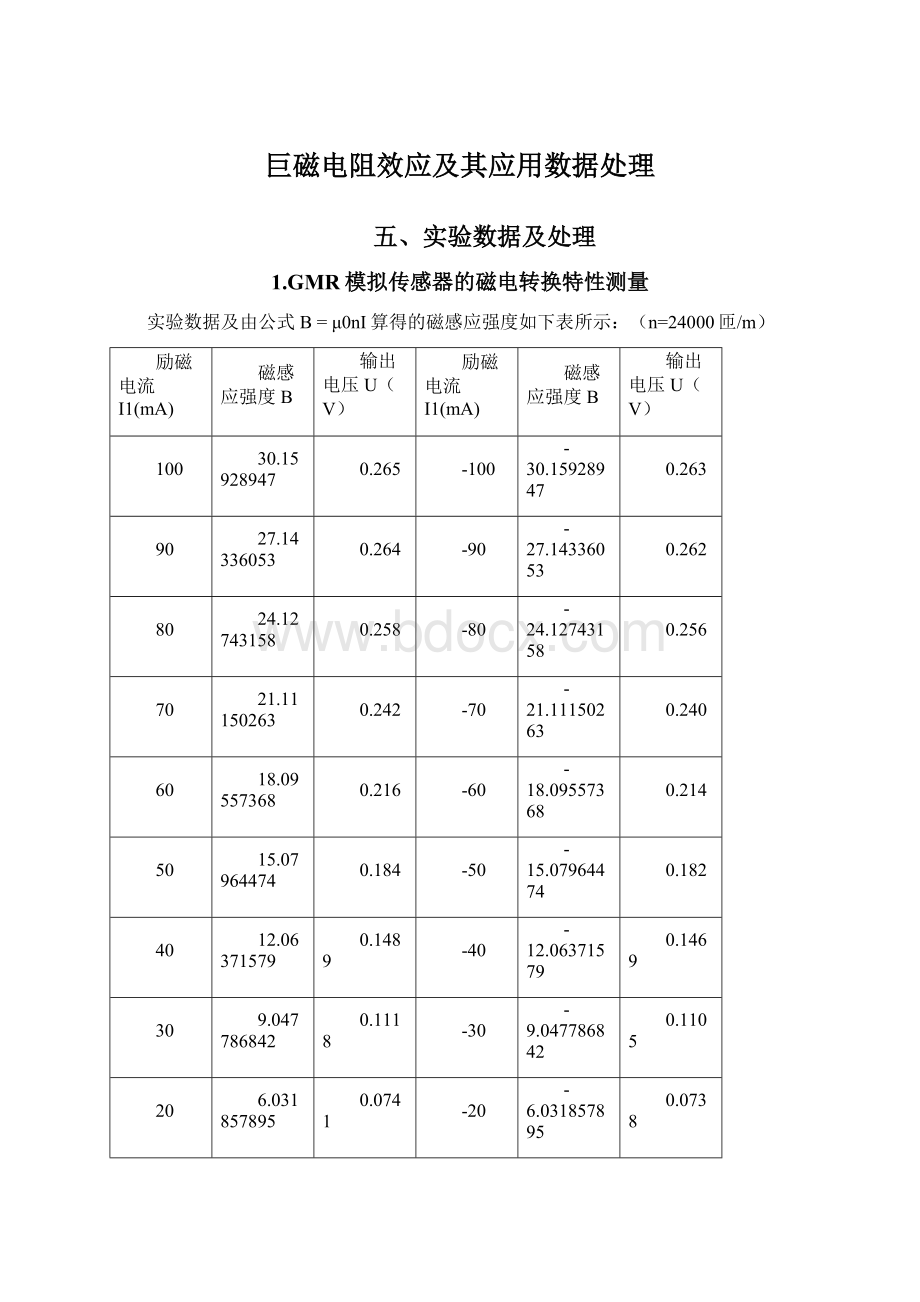
1.GMR模拟传感器的磁电转换特性测量
实验数据及由公式B=μ0nI算得的磁感应强度如下表所示:
(n=24000匝/m)
励磁电流I1(mA)
磁感应强度B
输出电压U(V)
励磁电流I1(mA)
磁感应强度B
输出电压U(V)
100
30.15928947
0.265
-100
-30.15928947
0.263
90
27.14336053
0.264
-90
-27.14336053
0.262
80
24.12743158
0.258
-80
-24.12743158
0.256
70
21.11150263
0.242
-70
-21.11150263
0.240
60
18.09557368
0.216
-60
-18.09557368
0.214
50
15.07964474
0.184
-50
-15.07964474
0.182
40
12.06371579
0.1489
-40
-12.06371579
0.1469
30
9.047786842
0.1118
-30
-9.047786842
0.1105
20
6.031857895
0.0741
-20
-6.031857895
0.0738
10
3.015928947
0.0389
-10
-3.015928947
0.0387
0
0
0.0088
0
0
0.0085
-10
-3.015928947
0.0273
10
3.015928947
0.0291
-20
-6.031857895
0.0591
20
6.031857895
0.061
-30
-9.047786842
0.0951
30
9.047786842
0.0966
-40
-12.06371579
0.1322
40
12.06371579
0.1331
-50
-15.07964474
0.1688
50
15.07964474
0.1691
-60
-18.09557368
0.203
60
18.09557368
0.204
-70
-21.11150263
0.233
70
21.11150263
0.233
-80
-24.12743158
0.252
80
24.12743158
0.251
-90
-27.14336053
0.260
90
27.14336053
0.260
-100
-30.15928947
0.263
100
30.15928947
0.252
以B为横坐标,输出电压U为纵坐标,作图得:
误差分析:
(1)在实验操作中,用恒流源调节励磁电流时距离要调到的值总会有部分偏差,其范围在正负0.2mA以内,反应在图像上就是最低处的输出都在y轴上,实际上应当是分别分布在y轴左右两侧的;
(2)用恒流源调节励磁电流时,为保证调到需要调到的励磁电流的精确度,会有很小幅度的回调,可能因磁滞现象造成影响;
(3)使用Excel表格处理数据的过程中可能会有精度损失;
2.GMR的磁阻特性曲线的测量
根据实验数据由公式B=μ0nI算得的磁感应强度,由R=U/I算得的电阻
如下表所示:
(磁阻两端电压U=4V)
励磁电流I1(mA)
磁感应强度B
磁阻电流I(mA)
磁阻R(Ω)
100
30.15928947
1.985
2015.11335
90
27.14336053
1.982
2018.163471
80
24.12743158
1.979
2021.22284
70
21.11150263
1.962
2038.735984
60
18.09557368
1.935
2067.183463
50
15.07964474
1.902
2103.049422
40
12.06371579
1.868
2141.327623
30
9.047786842
1.833
2182.214948
20
6.031857895
1.798
2224.694105
10
3.015928947
1.767
2263.723826
0
0
1.739
2300.172513
-10
-3.015928947
1.751
2284.408909
-20
-6.031857895
1.78
2247.191011
-30
-9.047786842
1.813
2206.287921
-40
-12.06371579
1.848
2164.502165
-50
-15.07964474
2
2123.142251
-60
-18.09557368
1.918
2085.505735
-70
-21.11150263
1.95
2051.282051
-80
-24.12743158
1.97
2030.456853
-90
-27.14336053
1.981
2019.182231
-100
-30.15928947
1.981
2019.182231
励磁电流I1(mA)
磁感应强度B
磁阻电流I(mA)
磁阻R(Ω)
-100
-30.15928947
1.981
2019.182231
-90
-27.14336053
1.98
2020.20202
-80
-24.12743158
1.972
2028.397566
-70
-21.11150263
1.958
2042.900919
-60
-18.09557368
1.93
2072.53886
-50
-15.07964474
1.901
2104.155708
-40
-12.06371579
1.863
2147.074611
-30
-9.047786842
1.832
2183.406114
-20
-6.031857895
1.798
2224.694105
-10
-3.015928947
1.768
2262.443439
0
0
1.739
2300.172513
10
3.015928947
1.759
2274.019329
20
6.031857895
1.788
2237.136465
30
9.047786842
1.821
2196.595277
40
12.06371579
1.855
2156.334232
50
15.07964474
1.89
2116.402116
60
18.09557368
1.924
2079.002079
70
21.11150263
1.955
2046.035806
80
24.12743158
1.971
2029.426687
90
27.14336053
1.981
2019.182231
100
30.15928947
1.983
2017.145739
作图如下:
误差分析:
(1)在实验操作中,用恒流源调节励磁电流时距离要调到的值总会有部分偏差,其范围在正负0.2mA以内,反应在图像上就是最高处的输出都在y轴上,实际上应当是分别分布在y轴左右两侧的;
(2)用恒流源调节励磁电流时,为保证调到需要调到的励磁电流的精确度,会有很小幅度的回调,可能因磁滞现象造成影响;
(3)使用Excel表格处理数据的过程中可能会有精度损失;
3.GMR开关(数字)传感器的磁电转换特性曲线测量
实验数据及由公式B=μ0nI算得的磁感应强度如下表所示:
高电平:
1V,低电平:
-1V
减小磁场
增大磁场
开关动作
励磁电流/mA
磁感应强度/G
开关动作
励磁电流/mA
磁感应强度/G
关
13.3
4.0111855
关
16.1
4.855645605
开
-18.1
-5.458831395
开
-16.3
-4.915964184
作图如下:
误差分析:
(1)在实验操作中,用恒流源调节励磁电流时距离要调到的值总会有部分偏差,其范围在正负0.2mA以内;
(2)用恒流源调节励磁电流时,为保证调到需要调到的励磁电流的精确度,会有很小幅度的回调,可能因磁滞现象造成影响;
(3)使用Excel表格处理数据的过程中可能会有精度损失;
4.用GMR传感器测量电流
低磁偏置25mV
励磁电流I(mA)
输出电压U(mV)
励磁电流I(mA)
输出电压U(mV)
300
24.9
-300
21
200
24.3
-200
21.7
100
23.6
-100
22.3
0
23
0
22.9
-100
22.4
100
23.6
-200
21.7
200
24.3
-300
21
300
24.9
适当磁偏置150mV
励磁电流I(mA)
输出电压U(mV)
励磁电流I(mA)
输出电压U(mV)
300
149.6
-300
144.5
200
149
-200
145.4
100
148.1
-100
146.3
0
147.3
0
147.2
-100
146.3
100
148.2
-200
145.4
200
149.2
-300
144.5
300
150.1
作图如下
误差分析:
(1)操作中,设置低磁偏置和适当磁偏置时,由于输出电压对偏置磁铁的位置变动很灵敏,故初始磁偏置时的输出电压距离要求会有误差;
(2)在实验操作中,用恒流源调节励磁电流时距离要调到的值总会有部分偏差,其范围在正负0.2mA以内;
(3)用恒流源调节励磁电流时,为保证调到需要调到的励磁电流的精确度,会有很小幅度的回调,可能因磁滞现象造成影响;
(4)使用Excel表格处理数据的过程中可能会有精度损失;
(5)测量适当磁偏置时,减小励磁电流时的初始电流300mA对应的输出电压偏离直线较多,可能由于操作原因,比如偏置磁铁的不稳定或触碰等。
5.GMR梯度传感器的特性及应用
起始角度/度
68
71
74
77
80
83
86
89
92
转动角度/度
0
3
6
9
12
15
18
21
24
输出电压/mV
0
30.9
55.9
42.2
-12.3
-50.8
-49.5
-25.4
-1
起始角度/度
92
95
98
101
104
107
110
113
116
转动角度/度
24
27
30
33
36
39
42
45
48
输出电压/mV
-1
27
52.9
33.9
-11.1
-47.3
-48.7
-27.3
-5.9
作图如下
误差分析:
(1)转动齿轮时,由于每次转动的幅度很小,由于操作原因会有转动的角度误差存在;
(2)转动齿轮后读数时,会有因读数造成的角度误差存在;
6.通过实验了解磁记录及读出的原理
实验数据如下表所示:
十进制数
211
二进制数
1
1
0
1
0
0
1
1
磁卡区域号
0
1
2
3
4
5
6
7
读出电平(V)
1.951
1.951
0.004
1.951
0.004
0.004
1.951
1.951
误差分析:
(1)设置的二进制数据写入时,磁卡区域可能未严格对齐;
GMR传感器在有关领域的应用实例:
基于GMR传感器阵列的生物检测:
GMR传感器比电子传感器更灵敏、可重复性强,具有更宽的工作温度、工作电压和抗机械冲击、震动的优异性能,而且GMR传感器的工作点也不会随时间推移而发生偏移。
GMR传感器的制备成本和检测成本低,对样本的需求量很小。
由GMR传感器组成的阵列,还可以结合现有的IC工艺,提高整体设备的集成度,进行多目标的检测。
同时,对比传统的荧光检测法,磁性标记没有很强的环境噪声,标记本身不会逐渐消退,也不需要昂贵的光学扫描设备以及专业的操作人员。
测量原理:
GMR阵列传感器生物检测的基本模式用GMR阵列传感器进行生物检测,是以磁性颗粒为标记物,采用直接标记法或两步标记法,在施加一定方向的外加磁场的情况下,用磁敏传感器对磁性标记产生的寄生磁场进行检测,从而实现对生物目标定性定量分析。
测量方法:
以DNA检测为例,第一步将已知序列的DNA探针链结合在包埋了自旋阀传感器的芯片表面,加入用生物素标记的DNA目标链溶液,进行充分杂交;第二步,加入被抗生物素包裹的磁性颗粒,形成生物素一抗生物素共价键,从而选择性地捕获磁性标记。
标记反应完成后,用外加梯度磁场将未参及标记的多余磁性颗粒分离,再施加激励磁场将磁标记(磁性颗粒)磁化,磁化的磁标记产生的寄生磁场引起传感器阻值的变化,从而导致反映生物反应的信号输出。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 磁电 效应 及其 应用 数据处理
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 铝散热器项目年度预算报告.docx
铝散热器项目年度预算报告.docx
-
牛津上海版通用小学英语三年级上册Unit 12同步练习2II 卷.docx
-
论我国私营企业员工激励机制.docx
-
人教版五年级品德与社会上册全册教案.docx
-
开学啦国旗下讲话稿三分钟.docx
-
露天采矿学复习题.docx
-
六年级英语教师年度考核个人总结.docx
-
某路站综合体项PC吊装施工方案.docx
-
人教版九年级历史上册期末考试试题一套.docx
-
隆昌妇幼保健院.docx
-
芦二矿抽采达标中长期规划.docx
-
看拼音写词语.docx
-
模拟磁盘调度算法系统的设计毕业设计.docx
-
每周一条名言警句或一首诗词.docx
-
棉花膜下滴灌示范工程设计总结报告.docx
-
九年级化学教案第十单元酸和碱教案新人教版.docx
-
宁波市水资源公报.docx
-
农业实用技术培训工作意见与农业局上半年工作总结范例两篇汇编.docx
-
平行线的判定.docx
-
内部会计管理制度11成本核算制度.docx
-
盘扣式脚手架支撑方案.docx
-
旅游规划模板.docx
-
煤矿大本大专毕业设计大采高综采工作面作业规程.docx
-
美学选择题整理课件资料.docx
-
名家论腹泻慢性肠炎.docx
-
宁夏银川市第一中学学年高一上学期期中考试地理试题解析解析版.docx
-
年产吨精密纤维纸项目建设建议书.docx
-
农技推广中心工作总结.docx
-
彭宇案的法逻辑批判.docx
-
宁夏仕奇房产网发布份房地产交易情况.docx
-
项目推荐书智能温控节能系统.docx
-
区县节日期间加强消防安全讲话稿与区发改委领导班子述职述廉报告汇编.docx
-
多选手机版.docx
-
高二文综上期中试题理.docx
-
城市社区信息化发展报告.docx
-
读书笔记100字20篇.docx
-
大学生入党积极分子思想汇报.docx
-
电脑散热知识大全.docx
-
第一完成单位中国石油大学华东理学院.docx
-
第三章MATLAB程序设计基础.docx
-
电力牵引供电作业指导书 精品.docx
-
成人本科学士学位英语统一真题考试0811.docx
-
东师管理会计17春在线作业1满分答案2.docx
-
抖音火的神曲28首.docx
-
大学英语综合教程3课后题答案.docx
-
电力设备预防性试验.docx
-
顶罩冲压模毕业设计.docx
-
恩能集团零售事业部经销部财务管理办法 2.docx
-
高考语文真题分类汇编Word版含答案解析考点11 论述类文本阅读.docx
-
发展战略当前宏观经济形势与发展方向.docx
-
高考政治时政热点专题之六.docx
