 《振动力学》习题集含答案docx.docx
《振动力学》习题集含答案docx.docx
- 文档编号:6952659
- 上传时间:2023-01-13
- 格式:DOCX
- 页数:53
- 大小:255.21KB
《振动力学》习题集含答案docx.docx
《《振动力学》习题集含答案docx.docx》由会员分享,可在线阅读,更多相关《《振动力学》习题集含答案docx.docx(53页珍藏版)》请在冰豆网上搜索。
《振动力学》习题集含答案docx
《振动力学》习题集(含答案)
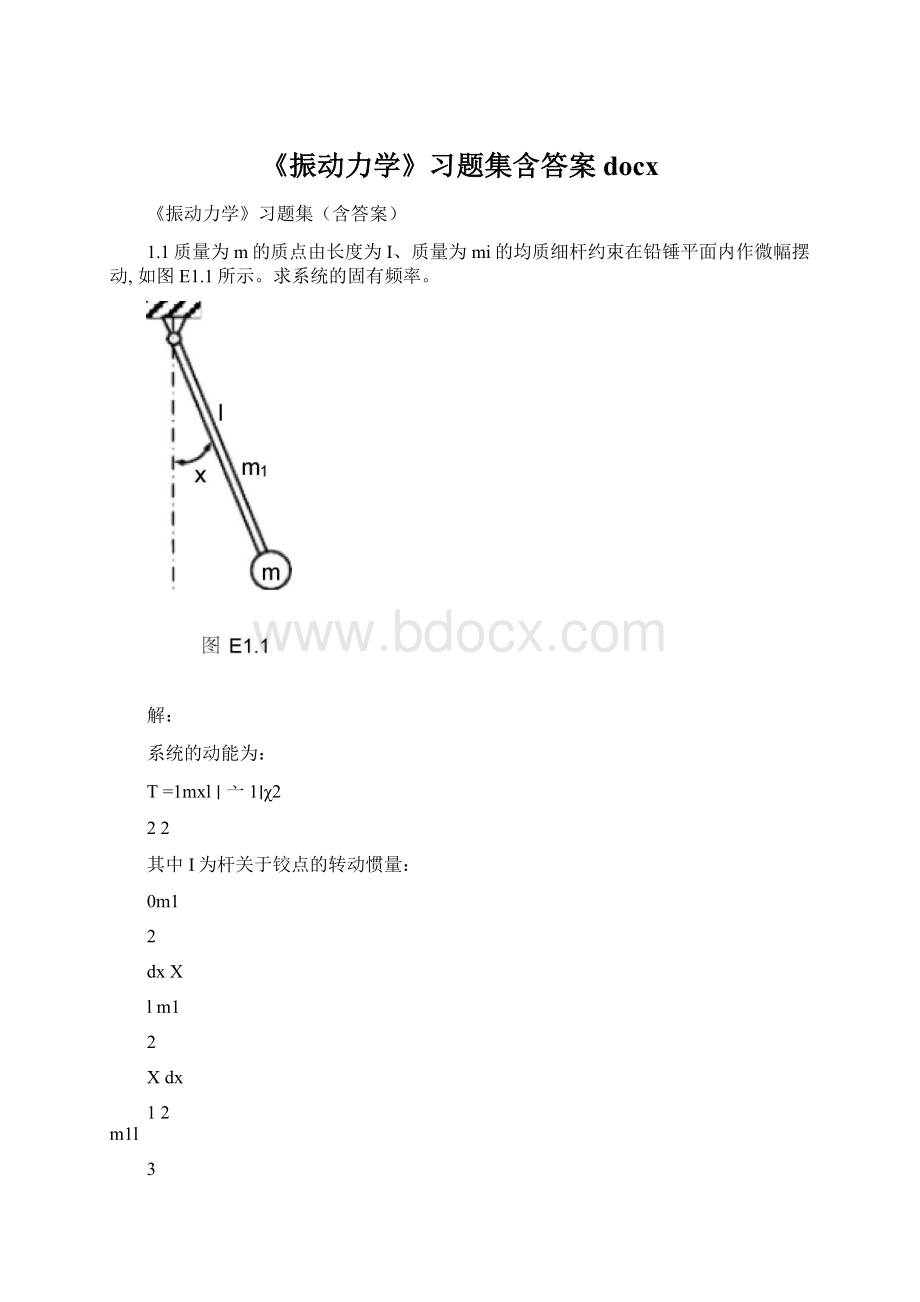
1.1质量为m的质点由长度为I、质量为mi的均质细杆约束在铅锤平面内作微幅摆动,如图E1.1所示。
求系统的固有频率。
解:
系统的动能为:
T=1mxl∣亠1∣χ2
22
其中I为杆关于铰点的转动惯量:
0m1
2
dxX
lm1
2
Xdx
12
m1l
3
则有:
系统的势能为:
12■
T=—mlX
2
'2
12—m1lX6
2'2
1
—3mm1lX
6
2'2
U=mgl1
-CoSXi亠my1-CoSX
2
1
=一mglx
2
1212—mylx=一2mm1glX
44
利用X=nx和T=U可得:
32mm1g'23mm1l
1.2质量为m、半径为R的均质柱体在水平面上作无滑动的微幅滚动,在CA=a的A点
系有两根弹性刚度系数为k的水平弹簧,如图E1.2所示。
求系统的固有频率。
解:
如图,令二为柱体的转角,则系统的动能和势能分别为:
T=1IBV2=1imR2亠-mR23mRS2
22I2丿4
U=2丄k(;R+apj=k(R+a阳2
利用Tl-∙'n3l和T=U可得:
2,l
4kRa_Ra4k
3mR2R∖.3m
1.3转动惯量为J的圆盘由三段抗扭刚度分别为k1,k2和k3的轴约束,如图E1.3所示。
求系统的固有频率。
图E1.3
解:
系统的动能为:
12
TJr2
2
k2和k3相当于串联,则有:
V-'T13,k2r2=k3r3
以上两式联立可得:
日2=—日,日3=—k2—日
k?
*k3k2+k3
系统的势能为:
1k1k2k3∙k2k3J
2∣Lk2k3
121212
Uk1—k2J2k3J3
222
利用V--和T=U可得:
k2k3k1k2k3
∙.Jk2k3
1.4
在图E1.4所示的系统中,已知
ki
i=1,2,3,m,a和b,横杆质量不计。
求固有
频率。
答案图E1.4
图E1.4
解:
对m进行受力分析可得:
mg
=k3X3,
X3
mg
k3
如图可得:
Xi
Fl
k1
X0
mgb
abki
X2
F2
k2
mga
abk2
则等效弹簧刚度为:
则固有频率为:
22
亠ak1bk2mg
2
abk1k2
2
ak1
2
bk2
2
Iyabk1k2
k3
1
mgmg
k
ke
2
abk1k2k3
a2k1k3b2k2k3亠〔ab2k1k2
ke
k1k2k3a'b
'■mk1k2a■b2■k3k1^'k2b2
示。
确定系统由此产生的自由振动。
解:
对m1由能量守恒可得(其中v1的方向为沿斜面向下)
m1gh=1m1v12
2
即Vi=J2gh
对整个系统由动量守恒可得:
m1v1=m1亠m2
Vo,即Vo
m1
m1亠m2
.2gh
令m2引起的静变形为X2,则有:
X2
m2gsin:
=kx2,即X
m2gSin
令mi+m2引起的静变形为
X12,同理有:
X12
m1■m2gSin:
■
得:
Xo=X12—X2
m1gSin:
■
Xo
则系统的自由振动可表示为:
X=X0cos∙∙nt■—Sin■∙nt
其中系统的固有频率为:
m1
m2
注意到Vo与X方向相反,得系统的自由振动为:
X=X0cosnt_
Vo
Sin',nt
1.9质量为m、长为I的均质杆和弹簧k及阻尼器C构成振动系统,如图E1.9所示。
以杆偏角二为广义坐标,建立系统的动力学方程,给出存在自由振动的条件。
若在弹簧原长处
立即释手,问杆的最大振幅是多少?
发生在何时?
最大角速度是多少?
发生在何时?
是否在过静平衡位置时?
解:
利用动量矩定理得:
IT1--kJaa-CFl,
ml
222
ml3cl3ka=O,
2
3cl
2ml
3c12a.mk
1=c:
:
:
一、:
一
2m.nlC3
mgkv0aa,
2
θ0
mgl
2ka
1.12面积为S质量为m的薄板连接于弹簧下端,在粘性流体中振动,如图E1.12所
示。
作用于薄板的阻尼力为Fd=^2Sv,2S为薄板总面积,V为速度。
若测得薄板无阻尼
自由振动的周期为TO,在粘性流体中自由振动的周期为Td。
求系数)。
图E1.12
解:
平面在液体中上下振动时:
mx2JSXkx=O
k2:
一22二
2^S
=2■n__
m
1-2
22
^S2JS
m∙∙nk
kJ2S2
k
竺k-42S2To∖k
2二m
ST°Td
2.1图E2.2所示系统中,已知
m,c,kι,k2,Fo和∙•。
求系统动力学方程和稳态响
应。
图E2.1
k2l
答案图E2.1(a)
解:
等价于分别为X和x2的响应之和。
先考虑
x1,此时右端固结,
力为图(b),故:
mx
k1x—x1c1x_X1
答案图E2.1(b)
系统等价为图(
a),受
mx亠∣k1k2XGc2x二k1XCIX
(1)
k1■k2
mxCXkx二k1A1sin1gA1cos“t
c二c1c2,k=k1k2,n二
(1)的解可参照释义(2.56),为:
k1A1
Sinst-V
Y(t)=2
k^C-S^+(2⅛)
C1AuCoSlr:
11-R
kJ(1-S2j+(2巴SS
其中:
■-1
S=
,弓=tg
故
(2)为:
IkI
+k2丿
k1k2
'2
P-S^+P5sf
1-
k^hk2丿
+C201
ILk1■k2
k1∙k2-m∙[亠iG■C^∙-12
k1k2
d.k1A1Sin(囲t_B1)+c1A1cc1cos(cc1t_色)
X(t)=
k1+k2_mC0:
j+(c1+C22
2
222
k1'c√,1
2222sin(KIIt-日1+日2
k1*k2-m,〕亠∣c■C2''12
I1
=tg--
1
2Sr=tg
-S
JC豹1∕(k1+k2)_tg
C1C2厂1
2
k1亠k2_,1m
k1k2
=tg
kι
考虑到x2t的影响,
则叠加后的
Xt为:
AIl222
A√ki+CiOi
2
Xt.k1∙k2一mJcU
SinCCit-tg
c1∙C2「.tg
匕k?
-(m
JcΓ,i
ki
如图T2-1所示。
已知,「-30,求系统的运动规律。
m=1kg,
2.1一弹簧质量系统沿光滑斜面作自由振动,k=49N/cm,开始运动时弹簧无伸长,速度为零,
解:
答案图T2-1
图T2-1
0
=70rad/s
mgSin、■:
mgSin〉二kx°,X
1
19.8
2=0.1Cm
49
X=X0cos■∙nt=一0.1CoS701Cm
h
k
W2
Wi
图T2-2
W2
V2
W1
-W2
v12,
v12
W2
W1W2
2gh
2.2如图T2-2所示,重物W1悬挂在刚度为k的弹簧上并处于静平衡位置,另一重物W2从高度为h处自由下落到W1上而无弹跳。
求W2下降的最大距离和两物体碰撞后的运动规
律。
X1.
Xo
平衡位置
X
答案图T2-2
解:
W2h=1W1v:
,V^..2gh
2g
动量守恒:
平衡位置:
W1
W1=kx1,X11
k
W1+W2
W1W^kx12,X1212
k
故:
故:
X=-XoCoSntJX^Sinnt
Vn
--x0cosnt
Sin■∙nt
2.4在图E2.4所示系统中,已知m,k1,k2,F0和•.,初始时物块静止且两弹簧均为
原长。
求物块运动规律。
-X1
k2
FoSin■∙t
X2
ΛMΛ
FoSin∙∙t
k2(X2—X1)
m
mx2
图E2.4
答案图E2.4
解:
取坐标轴X1和X2,对连接点A列平衡方程:
—k1x1■k2X2-X1]亠F0Sin∙.t=0即:
(1)
k1∙k2x1=k2x2■F0Sin∙,t
对m列运动微分方程:
即:
mx2_-k2x2_x1
mx2亠k2x2
(2)
由
(1),
(2)消去x1得:
mx2
k1k2
k1
k2
X2
FOk2
sin,t
故:
k1k
由(3)得:
x2ti=
F0k2
k1k2■■
k1亠k
(3)
k1k2
Sint
Sinnt
X=Vo,求系
2.5在图E2.3所示系统中,已知m,c,k,Fo和•■,且t=0时,x=x°,
统响应。
验证系统响应为对初值的响应和零初值下对激励力响应的叠加。
匕八k…
m JC FOcos■,t 图E2.3 解: Xt=e一°tccos;讥t亠DSin;汀dti亠ACOSF't-τl 1 P(I_s2$+(2≤s2 X0=XO=CACOSj=C=x0-Acosv x(t)=-⅛0e-c^t(CCoSeCdt+DSinc‰t) +e-°°0t(-Coc∣dSinCCdt+Dodcosω∣dt)-AoilSin(c⅛t-B) X(O=v0=—0C■D;.Td'A;: ;■sinJ=■D Vo*—oC ■∙d 求出C,D后,代入上面第一个方程即可得。 2.7由一对带偏心质量的等速反向旋转齿轮构成的振动机械安装在弹簧和阻尼器构成的支承上,如图E2.7所示。 当齿轮转动角速度为■■时,偏心质量惯性力在垂直方向大小为 meTsin7。 已知偏心重W=125.5N,偏心距e=15.0cm,支承弹簧总刚度系数k=967.7 N∕cm,测得垂直方向共振振幅Xm=I.07cm,远离共振时垂直振幅趋近常值X。 =0.32cm。 求支承阻尼器的阻尼比及在=300Rmin运行时机器的垂直振幅。 解: me Xt=Tr 」2S 1-S*2 2 S s=1时共振,振幅为: (1) me1 Xi1.07Cm M2ξ 远离共振点时,振幅为: me X20.32Cm M (2) 由 (2)=•M me 由 (1) me =⅛⅛= M 1 2X1 me1 meX22XI =0.15 2X1 ◎0 ik ■=300r.min,0=,S M 故: me X= M =3.810°m 2.7求图T2-7中系统的固有频率,悬臂梁端点的刚度分别是k1及k3,悬臂梁的质量忽 略不计。 图T2-7 答案图T2-7 量质无 解: kι和k2为串联,等效刚度为: kk k12="K2。 (因为总变形为求和) k1+k2 k12和k3为并联(因为k12的变形等于k3的变形),则: k1k2 k123~k12k3k3 &卄2 k1k2k1k3k2k3 kι'k2 k123和k4为串联(因为总变形为求和),故: ke k123 k4 k1k2k4'k1k3k4'k2k3k4 k123k4 kιk2kιk3k2k3kιk4k2k4 故: 2.9如图T2-9所示,一质量m连接在一刚性杆上,杆的质量忽略不计,求下列情况系 统作垂直振动的固有频率: (1)振动过程中杆被约束保持水平位置; (2)杆可以在铅锤平面内微幅转动; (3)比较上述两种情况中哪种的固有频率较高,并说明理由。 k1 m -O ∣1 ∣2 图T2-9 { H-∣I >xI) 1 1 X2 F2 ∣1 mg 答案图T2-9 解: (1) 保持水平位置: . k1k2 (2) 微幅转动: X=X1X Fl土 k1 ∣1'∣2 Lmg Lmg ∣1'∣2k1 ∣1 代―k1 mg 故: 」坠上如mg ∣1∣2∣1'∣2k1k2 2 ∣2k2∣1T2∣1k1-∣1∣2k2 2 (∣1+∣2)k1k2 22 ∣1k1-∣2k 122 mg 2 (∣1+∣2)k1k2 ke mg 2 +I2)k1k2 22 ∣1k1∣2k2 2.10求图T2-10所示系统的固有频率,刚性杆的质量忽略不计。 解: 答案图T2-10 mglakI x1a XAl ■XA a =—x1 l mgl 2 ak1 X=X2XA mg m的位置: ^X2X^mgXA k2 mgl mgl-FIa,FI,.Xi a 22 ak1lk2Ξ-mgak1k2 2 ak1k2 k-_— e—22, aki■lk2 2.11图T2-11所示是一个倒置的摆。 摆球质量为m,刚杆质量可忽略,每个弹簧的刚 度为上。 2 (1)求倒摆作微幅振动时的固有频率; (2)摆球质量m为0.9kg时,测得频率仁为1.5Hz,m为1.8kg时,测得频率为0.75 Hz,问摆球质量为多少千克时恰使系统处于不稳定平衡状态? 零平衡位置 O a : — rτn 图T2-1 =2 j∕,y√r> 答案图T2-11 (1) IT2 122 ml'τl 2 -mgl1「cosV 利用TmaX二Umax 221 ka——mgl 2 θ—Qθ ■■maxn■'max J=丄ka2_mgl 2 答案图T2-11 (2) 2 ka—mgl ml2 l 2 kag ml2 (2) 若取下面为平衡位置,求解如下: 1 =—ml 2 2y 122 mglCoSd=一kamgl 2 12212122kaτιmglmglvka-mglv 222 Pl"Ba TU=0,2mlm2τlka2-mgldt ml2V■ka2-mglv-0 2 ka-mgl ml2 1—2Sin mgl 2.17图T2-17所示的系统中,四个弹簧均未受力,k1=k2=k3=k4=k,试问: (1)若将支承缓慢撤去,质量块将下落多少距离? (2)若将支承突然撤去,质量块又将下落多少距离? 解: (1) mg=k1234Xo, Xo (2) x0COS■,nt, 图T2-17 k23 k123 k1234 2mg X max =k? ■k3 =2 Xo k1k 23 k1-k k123 k123 23 k4 4mg 2.19如图T2-19所示,质量为m2的均质圆盘在水平面上可作无滑动的滚动,鼓轮绕轴 的转动惯量为I,忽略绳子的弹性、质量及各轴承间的摩擦力,求此系统的固有频率。 图T2-19 R2 •2 m2「 1Q1 T=-m1X_I 22 1,21[1—m2x+——I22(2 I m1■— 3 -—m2 2 χ2 I ■2 1 =-meX 2 系统动能为: 1k 2 RrX R2 k2亠k1 1 k2 2 12 二—keX 2 根据: Tmax =Vmax,Xmax ='nXmax 2 k2■k1RI 2 ''n= 2 R2 I3 m12._m2 R22 2.20如图T2-20所示,刚性曲臂绕支点的转动惯量为 Io,求系统的固有频率。 图T2-20 1,21.B2 TIOhm1虫 22 22^2 m〔am2∣TI 系统动能为: V虫眇T眇刊 根据: 冷k1a2 222 k2lk3b71 Tmax=Vmax ,JmaX=■n二max 222 k〔a亠k2∣亠k3b I2I2 IO亠m1a亠m2∣ 2.24一长度为I、质量为m的均匀刚性杆铰接于O点并以弹簧和粘性阻尼器支承,如 图T2-24所示。 写出运动微分方程,并求临界阻尼系数和无阻尼固有频率的表达式。 解: 利用动量矩方程,有: Jτl--kJaa-cFI,J Jml2 3 222 ml3cl3kaTl 3ka2 ml2 3cl2 ml2 23ka2ml2 2amk 2.25图T2-25所示的系统中,刚杆质量不计,写出运动微分方程,并求临界阻尼系数及阻尼固有频率。 图T2-25 答案图T2-25 解: mτι∣ICTlaakτιbb=O 2.2.2. mlCakb=O 2 2 Ca 2ml =2-;.-? n, Ca 2 2mln 2ml ∖4kml2b2 24 -Ca 2bl/— =I=C=2Xmk a 2.26图T2-26所示的系统中,m=1kg,k=144N/m,C=48N? S/m,lι=l=0.49m, ∣2=0.5l,∣3=0.25l,不计刚杆质量,求无阻尼固有频率,及阻尼o Qm Il 图T2-26答案图T2-25 解: 受力如答案图T2-26。 对O点取力矩平衡,有: mT1∙∣1■cT3I3■kT2」2=° 222 mlI.cl3j■kl2^-0 ■-1-1 m∙c∙k-I-0 164 4m =2■ 1—C16 m —C1 0.25 16m2CCn 4.7两质量均为m的质点系于具有张力F的弦上,如图E4.7所示。 忽略振动过程中弦 张力的变化写出柔度矩阵,建立频率方程。 求系统的固有频率和模态,并计算主质量、主刚 度、简正模态,确定主坐标和简正坐标。 答案图E4.7 (1) 图E4.7 解: Sin,Sin^2 l Sin-∣3二T3=竺 l 根据m1和m2的自由体动力平衡关系,有: 故: my m2y2 =-FSinZi1 =-FSinV2 mi 0 FSinJ2F —FSinτ∣3F yι l Y2 l y2-yiF -「y2-2yi y2FO yi-2y2ll 0TyL打 ESl] 2-1yi J12虹 当m1=m2时, 2 蛍mly1=YSint,y2=Y2Sint,■= F 代入矩阵方程,有: U2二朴0 2-1 2 =2……1= ■-1 -3=O -12-■ '1,2=1,3 2F .F2 F 3F 1-1 1,'2= = ml ml ml ml 根据2-,Y1-Y2^0得: 第一振型 第二振型 答案图E4.7 (2) 4.11多自由度振动系统质量矩阵M和刚度矩阵K均为正定。 对于模态Xi和Xj及自然 数n证明: XTMKJMXj=O,XTKMJKXj=0 解: KXj-.j2MXj,等号两边左乘KMJ 1212T KM一KXj=.jKM一MXj=.jKXj,等号两边左乘Xi XTIKMJKXj=.j2IXTKXjL0,当i=j时 重复两次: 121 KM一KXj=川jKXj,等号两边再左乘KM一 KMJKMJKXj-jKmJKXj,等号两边左乘X- XiTKM 122T JKXj=■jXi KMJKIXj= 0, 当i=j时 重复n次得到: XTKM 丄T IKXj=0 2 KXj=jMXj, 寺号两边左乘 MK _12Λ MKKXj--jMKMXj 故: 2_1T MXj=jMKMXj,等号两边左乘Xi XTMXj=2XTMK’MXj=0,当i=j时 即X


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 振动力学 振动 力学 习题集 答案 docx
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 铝散热器项目年度预算报告.docx
铝散热器项目年度预算报告.docx
-
牛津上海版通用小学英语三年级上册Unit 12同步练习2II 卷.docx
-
论我国私营企业员工激励机制.docx
-
人教版五年级品德与社会上册全册教案.docx
-
开学啦国旗下讲话稿三分钟.docx
-
露天采矿学复习题.docx
-
六年级英语教师年度考核个人总结.docx
-
某路站综合体项PC吊装施工方案.docx
-
人教版九年级历史上册期末考试试题一套.docx
-
隆昌妇幼保健院.docx
-
芦二矿抽采达标中长期规划.docx
-
看拼音写词语.docx
-
模拟磁盘调度算法系统的设计毕业设计.docx
-
每周一条名言警句或一首诗词.docx
-
棉花膜下滴灌示范工程设计总结报告.docx
-
九年级化学教案第十单元酸和碱教案新人教版.docx
-
宁波市水资源公报.docx
-
农业实用技术培训工作意见与农业局上半年工作总结范例两篇汇编.docx
-
平行线的判定.docx
-
内部会计管理制度11成本核算制度.docx
-
盘扣式脚手架支撑方案.docx
-
旅游规划模板.docx
-
煤矿大本大专毕业设计大采高综采工作面作业规程.docx
-
美学选择题整理课件资料.docx
-
名家论腹泻慢性肠炎.docx
-
宁夏银川市第一中学学年高一上学期期中考试地理试题解析解析版.docx
-
年产吨精密纤维纸项目建设建议书.docx
-
农技推广中心工作总结.docx
-
彭宇案的法逻辑批判.docx
-
宁夏仕奇房产网发布份房地产交易情况.docx
-
项目推荐书智能温控节能系统.docx
-
区县节日期间加强消防安全讲话稿与区发改委领导班子述职述廉报告汇编.docx
-
人教版三年级数学下册两位数乘法竖式计算练习题116.docx
-
融资租赁合同售后回租.docx
-
设计概论教学计划教案序号.docx
-
事务中心服务大厅各类突发事件处置应急预案.docx
-
苏教版六年级下解决问题的策略教材分析和教学设计.docx
-
桐庐卫生系统招聘考试真题及答案解析.docx
-
完整word版执业医师实践技能之体格检查word文档良心出品.docx
-
五年级数学上册口算题卡强烈推荐9.docx
-
小学《环保教育》校本课程教材三年级用.docx
-
小学数学教案人教版.docx
-
新版农业果品互联网电子商务平台的投资与建设商业计划书.docx
-
新型主动型自洁式家用太阳能光伏发电装置.docx
-
一建法规真题.docx
-
有机农业种养植基地建设项目可行性研究报告.docx
-
整编XX智能弱电综合布线系统项目建设可行性方案.docx
-
中小学信息技术教案全集1.docx
-
专题05必修4重点句型讲解部分学年高一英语下学期期末考试备考满分冲刺专.docx
-
最新版小学一年级下册中国新疆教案.docx
-
最新上海牛津版学年英语八年级上学期期末模拟测试题及答案精编试题.docx
