 试验三最小拍控制系统.docx
试验三最小拍控制系统.docx
- 文档编号:6785368
- 上传时间:2023-01-10
- 格式:DOCX
- 页数:9
- 大小:85.63KB
试验三最小拍控制系统.docx
《试验三最小拍控制系统.docx》由会员分享,可在线阅读,更多相关《试验三最小拍控制系统.docx(9页珍藏版)》请在冰豆网上搜索。
试验三最小拍控制系统
试验三・最小拍控制系统
实验三:
最小拍控制系统
、实验目的
1建立计算机最小拍控制系统的一般概念;
2.掌握有纹波最小拍控制器的设计方法
3•观察无纹波最小拍控制器的设计方法;
4.了解最小拍控制器的优缺点;
5•掌握最小拍控制系统的改进方法。
、实验仪器
1.PC计算机一台
、实验内容
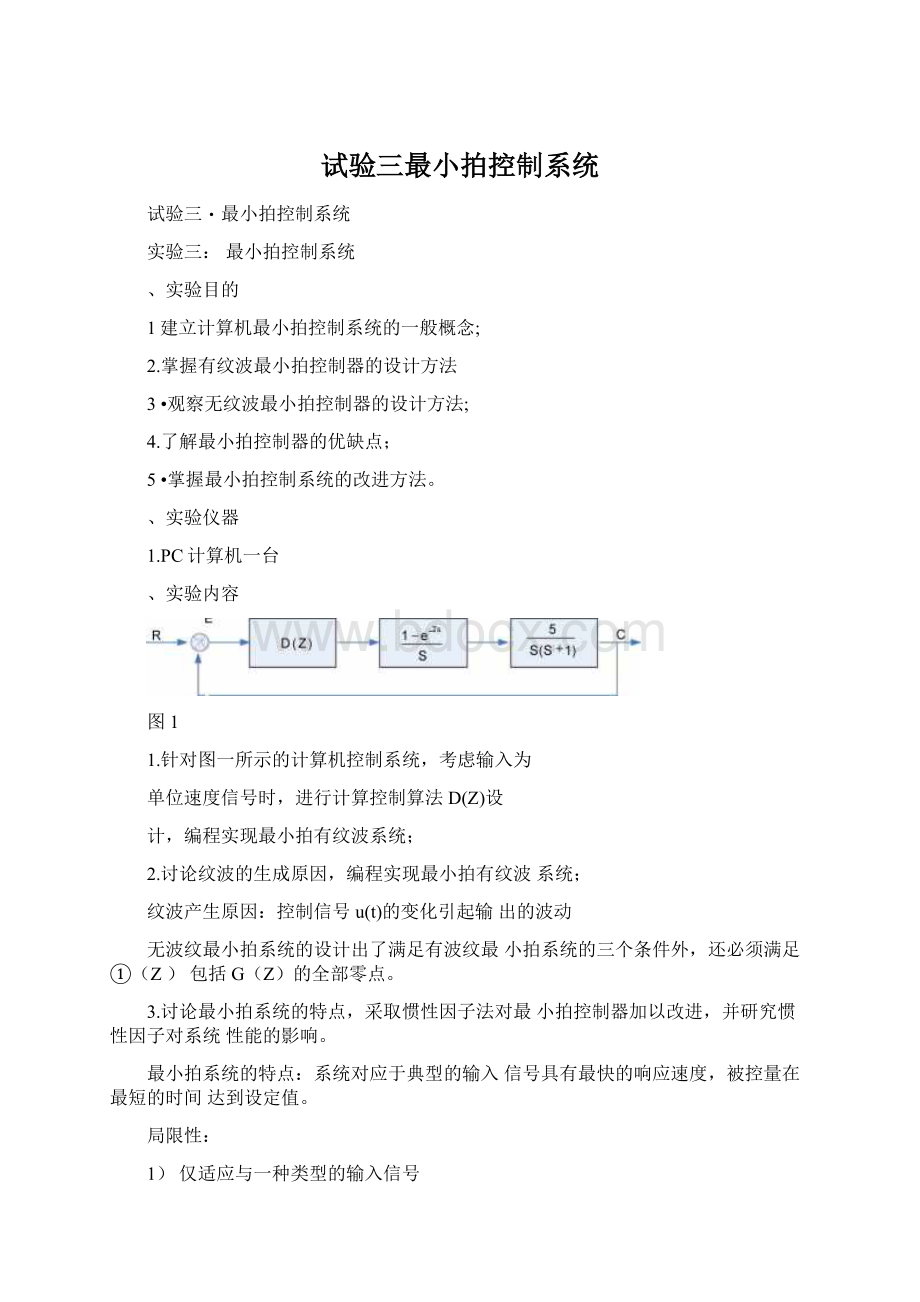
图1
1.针对图一所示的计算机控制系统,考虑输入为
单位速度信号时,进行计算控制算法D(Z)设
计,编程实现最小拍有纹波系统;
2.讨论纹波的生成原因,编程实现最小拍有纹波系统;
纹波产生原因:
控制信号u(t)的变化引起输出的波动
无波纹最小拍系统的设计出了满足有波纹最小拍系统的三个条件外,还必须满足①(Z)包括G(Z)的全部零点。
3.讨论最小拍系统的特点,采取惯性因子法对最小拍控制器加以改进,并研究惯性因子对系统性能的影响。
最小拍系统的特点:
系统对应于典型的输入信号具有最快的响应速度,被控量在最短的时间达到设定值。
局限性:
1)仅适应与一种类型的输入信号
2)系统参数变化引起系统极点位置产生偏移,系统动态性能明显变坏。
3)采样周期的限制。
惯性因子法:
基本思想:
牺牲有限拍的性质为代价,换取系统对不同输入类型性能皆能获得比较满意的控制效果。
方法:
引进惯性因子,改进系统的闭环脉冲传递函数,使系统对多种信号的输入信号都有满意的响应。
1一砂⑵」-叫|ff| 1-碇J1 相当于增加单位圆内实轴上的极点 设被控对象传递函数G(z)5,采样周期Ts=0.1s,s(s+1) 在单位速度输入作用下,采用惯性因子法设计有限拍控制系统,编程仿真实现,并讨论惯性因子对系统性能的影响。 四、实验步骤 1.第一步: 求广义脉冲传递函数 >>Gs=tf([5],[1,1,0]); >>Gz=c2d(Gs,0.1,'zoh')〃求解广义对象的脉 冲传递函数 Transferfunction: 0.02419z+0.02339zA2-1.905z+0.9048 Samplingtime: 0.1 第二步: 确定闭环脉冲传递函数①(Z)由广义对象的闭环脉冲传递函数得延迟因子为z」,则①(Z)应包含该延迟因子 >>[num,den]=c2dm([5],[1,1,0],0.1,'zoh')num= 00.02420.0234 den= 1.0000-1.90480.9048 >>tf2zpk(num) ans= -0.9672 由此可得: G(z)没有单位圆上或圆外的零点 >>tf2zpk(den) ans= 1.0000 0.9048 由此可得: G(z)包含一个单位圆上极点根据物理可实现条件和稳定性条件,① (Z)=zF1(z) 根据零稳态误差条件和稳定性条件,①e(Z)=1- ①(Z)=(1-z)A2*F2(z) 根据①e(Z)=1-①(Z) F1(z)=2-z, F2(z)=1 所以①e(Z)=(1-z)八2>>Qez=tf([1-21],[1,0,0],0.1) >>Qz=1-Qez Transferfunction: 2z-1 zA2 Samplingtime: 0.1 >>Dz=1/Gz*Qz/(1-Qz) Transferfunction: 2zA5-4.81zA4+3.715Z-0.9048 zA2 0.02419zA5-0.02498乙八4-0.0226+ 0.02339zA2 Samplingtime: 0.1 >>Qz=minreal(Dz*Gz/(1+Dz*Gz)); >>Q=2; >> t=0: 0.1: Q;u=t;plot(0: 0.1: Q,u,'r*');hold on >>yt=lsim(Qz,u,t,0);plot(0: 0.1: Q,yt); 结果如图一 2.根据物理可实现条件和稳定性条件以及无纹波条件 _1」 ①(Z)=工*(1+0.9672z「)F1(z) 根据零稳态误差条件和稳定性条件 J ①e(Z)=1-①(Z)=(1-z「)a2*F2(z)根据①e(Z)=1-①(Z) 1 F1(z)=1.2666-0.7583Z J F2(z)=1+0.7334Z 所以①e(Z)=1-1.2666z=0.4668z^-0.7334z' >>Qez=tf([1-1.2666-0.4668 0.7334],[1,0,0,0],0.1); >>Qz=1-Qez Transferfunction: 1.267zA2+0.4668z-0.7334 zA3 Samplingtime: 0.1 设计最小拍无纹波系统控制器 >>Dz=1/Gz*Qz/(1-Qz)Transferfunction: 1.267zA7-1.946北八6-0.4765北八5+1.819 zA4-0.6636zA3 0.02419zA7-0.007241zA6-0.04092zA5+ 0.006818zA4+0.01716北八3 Samplingtime: 0.1 >>Qz=minreal(Dz*Gz/(1+Dz*Gz)); >>Q=2; >>t=0: 0.1: Q;u=t;plot(0: 0.1: Q,u,'r*');holdon >>yt=lsim(Qz,u,t,0);plot(0: 0.1: Q,yt); 结果如图二 3.改变a的值,观测实验结果 a=0.8 Qez=tf([1-1.2666-0.46680.7334],[1,0.8,0,0],0.1);Qz=1-Qez;Dz=1/Gz*Qz/(1-Qz);Qz=minreal(Dz*Gz/(1+Dz*Gz)); Q=2; t=0: 0.1: Q;u=t;plot(0: 0.1: Q,u,'r*');holdonyt=lsim(Qz,u,t,0);plot(0: 0.1: Q,yt); 结果如图三 a=0.5 Qez=tf([1-1.2666-0.46680.7334],[1,0.5,0,0],0.1);Qz=1-Qez >>Dz=1/Gz*Qz/(1-Qz) >>Qz=minreal(Dz*Gz/(1+Dz*Gz)); Q=2; t=0: 0・1: Q;u=t;plot(0: 0・1: Q,u,'r*');holdonyt=lsim(Qz,u,t,0);plot(0: 0.1: Q,yt); 结果如图四 a=0.2 Qez=tf([1-1.2666-0.46680.7334],[1,0.2,0,0],0.1);Qz=1-Qez>>Dz=1/Gz*Qz/(1-Qz) >>Qz=minreal(Dz*Gz/(1+Dz*Gz)); Q=2; t=0: 0.1: Q;u=t;plot(0: 0.1: Q,u,'r*');holdonyt=lsim(Qz,u,t,0);plot(0: 0.1: Q,yt); 结果如图五 二国 '—園 三国 Z819JklZVV8090kOSO0 ]J i-K JJJJ ] £ 1J~-_ Aj* * 4 ■_i 9 90 L 津”斗 >< *— 91 "k jiI.'' ¥ +' 乙 图五 综上可得: 最小拍系统的特点: 系统对应于典型的输入信号具有最快的响应速度,被控量在最短的时间达到设定值。 局限性: 1)仅适应与一种类型的输入信号 2)系统参数变化引起系统极点位置产生偏移,系统动态性能明显变坏。 3)采样周期的限制。 惯性因子法: 基本思想: 牺牲有限拍的性质为代价,换取系统对不同输入类型性能皆能获得比较满意的控制效果。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 试验 最小 控制系统
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 对中国城市家庭的教育投资行为的理论和实证研究.docx
对中国城市家庭的教育投资行为的理论和实证研究.docx
-
二年级下册数学练习题大全.docx
-
二十年后回故乡的优秀作文.docx
-
软基换填施工方案.docx
-
《黑白装饰画》教案.docx
-
课堂教学改革实施方案5篇.docx
-
返璞归真简约致美解读《给予树》教学设计语文.docx
-
离职证明范本精选多篇.docx
-
《天局》全文.docx
-
我害怕作文集合15篇.docx
-
伏魔战记39详细攻略.docx
-
幼儿园学期计划.docx
-
雅思分类打印版Word格式文档下载.docx
-
年产1万吨竹子纤维加工项目可行性研究报告文档格式.docx
-
电商产业化项目投资经营商业计划书Word文件下载.docx
-
医学多媒体课件的设计与制作Word文档格式.docx
-
中学生中秋节想象作文Word格式.docx
-
等保20之漏洞扫描系统技术方案建议书Word文档格式.docx
-
培训学校个人工作计划模板5篇Word格式.docx
-
北京各区二模试题分类汇编文言文阅读Word文档下载推荐.docx
-
不同职业病危害因素的防护常识Word格式文档下载.docx
-
一年级上册同音形近字练习汇总Word文档格式.docx
-
班级家长会上班主任教师讲话稿Word下载.docx
-
科斯塔环载波恢复Word文件下载.docx
-
浙教义务版六年级语文下册教案 花潮Word文件下载.docx
-
集成电路设计与集成系统专业Word格式文档下载.docx
-
开工第一课专题讲座观后感文档格式.docx
-
东城区学年第一学期高三期末化学试题及答案Word格式文档下载.docx
-
苏教版六年级语文下册第七单元测试题Word格式文档下载.docx
-
学长征精神做红色传人活动方案文档格式.docx
-
读书笔记150字30篇文档格式.docx
-
中级经济法考前必背法条精华版备考资料Word格式.docx
-
卫生部定点健康管理中心Word格式文档下载.docx
-
四年级 新经典诵读内容修改后文档格式.docx
-
全市冬春火灾防控部署会讲话稿与电信营业厅厅长竞聘演讲辞与榜样观后感多篇合集Word文件下载.docx
-
基于回溯法和贪婪法的多机调度问题Word文件下载.docx
-
中小学读书的乐趣作文通用15篇文档格式.docx
-
在教学中如何落实教学常规Word下载.docx
-
健康评估复习资料全Word格式.docx
-
四下数学小数加减法说课稿Word文档格式.docx
-
我的大学思辨天下辩论赛策划书Word下载.docx
-
演讲稿怎么写Word下载.docx
-
在宗祠落成庆典上的致辞精彩编辑多篇Word文档下载推荐.docx
-
苏价服113号Word格式文档下载.docx
-
基于JAVA+SQLServer超市管理系统毕业设计论文Word文档下载推荐.docx
-
镇江市城市总体规划Word文档下载推荐.docx
-
张可兴博客投资语言精华Word文档格式.docx
-
基于单片机的湿度采集系统设计 2Word文档格式.docx
-
苏教版语文四年级下册期末测试题及答案3套Word文档下载推荐.docx
-
完整升级版人教第七册语文教案及反思docWord格式文档下载.docx
-
学习SEM必需会的知识文档格式.docx
