 pid控制原理.docx
pid控制原理.docx
- 文档编号:6667422
- 上传时间:2023-01-08
- 格式:DOCX
- 页数:8
- 大小:59.72KB
pid控制原理.docx
《pid控制原理.docx》由会员分享,可在线阅读,更多相关《pid控制原理.docx(8页珍藏版)》请在冰豆网上搜索。
pid控制原理
pid控制原理
PID控制概述
1.PID控制的原理和特点:
在工程实践中,应用最为广泛的调节器控制规律为比例、积分、微分控制,简称PID控制,又称PID调节。
PID控制器问世至今已有近70年历史,它以结构简单、稳定性好、工作可靠、调整方便而成为工业控制的主要技术之一。
当被控对象的结构和参数不能完全掌握,或得不到精确的数学模型时,控制理论的其他技术难以采用时,系统控制器的结构和参数必须依靠经验和现场调试来确定,这时应用PID控制技术最为方便。
即当我们不完全了解一个系统和被控对象,或不能通过有效的测量手段来获得系统参数时,最合适用PID控制技术。
PID控制,实际中也有PI和PD控制。
PID控制器就是根据系统的误差,利用比例、积分、微分计算出控制量进行控制的。
二、控制算法
2.1控制器公式
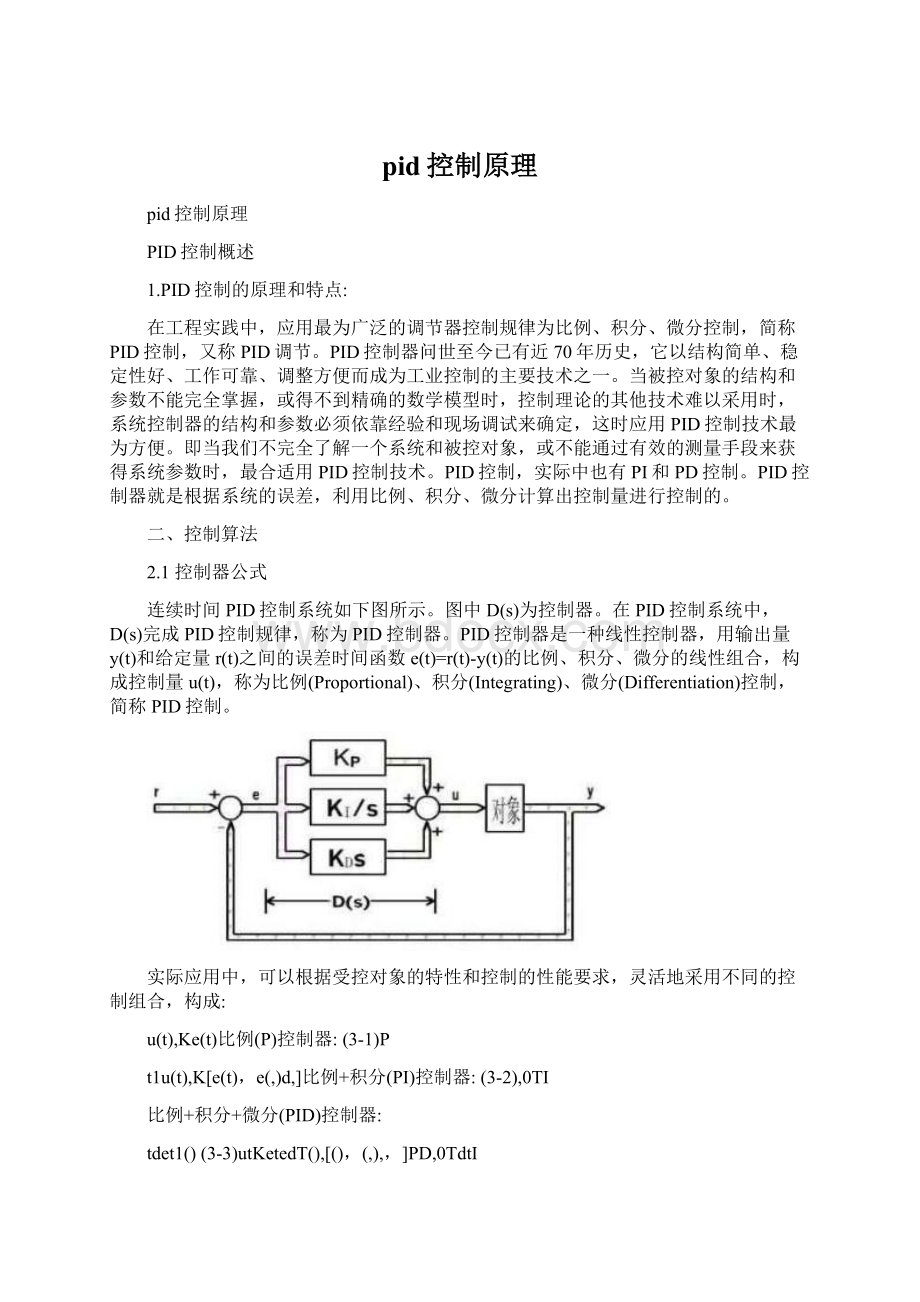
连续时间PID控制系统如下图所示。
图中D(s)为控制器。
在PID控制系统中,D(s)完成PID控制规律,称为PID控制器。
PID控制器是一种线性控制器,用输出量y(t)和给定量r(t)之间的误差时间函数e(t)=r(t)-y(t)的比例、积分、微分的线性组合,构成控制量u(t),称为比例(Proportional)、积分(Integrating)、微分(Differentiation)控制,简称PID控制。
实际应用中,可以根据受控对象的特性和控制的性能要求,灵活地采用不同的控制组合,构成:
u(t),Ke(t)比例(P)控制器:
(3-1)P
t1u(t),K[e(t),e(,)d,]比例+积分(PI)控制器:
(3-2),0TI
比例+积分+微分(PID)控制器:
tdet1()(3-3)utKetedT(),[(),(,),,]PD,0TdtI
式中,K——比例放大系数;T——积分时间;T——微分时间pID
2.2位置式PID控制算法:
在电子数字计算机直接数字控制系统中,PID控制器是通过计算机PID控制算法程序实现的。
计算机直接数字控制系统大多数是采样-数据控制系统。
进入计算机的连续-时间信号,必须经过采样和数量化后,变成数字量,方能进入计算机的存储器和寄存器,而在数字计算机中的计算和处理,不论是积分还是微分,只能用数值计算法去逼近。
在数字计算机中,PID控制规律的实现,也必须用数值逼近的方法。
当采样周期相当短时,用求和代替积分,用差商代替微商,使PID算法离散化,将描述连续时间PID算法的微分方程,变为描述离散时间PID算法的差分方程。
下图即为位置是算法框图:
考虑式(3-3),用矩阵积分时,有
ktT1se(,)d,,e(j)(3-4),,0TT,0jIi
用差分代替微分
Tde(t)DT,[e(k),e(k,1)](3-5)ddtTS
将式(3-4)、(3-5)代入式(3-3),PID算法变为
kTTSDu(k),K[e(k),e(j),(e(k),e(k,1))],u(3-6),P0TT,j0IS
或
k
u(k),Ke(k),Ke(j),K(e(k),e(k,1))],u(3-7),PID0,j0
式中-----------控制量的基值,即K=0时的控制值;u0
-------第K个采样时刻的控制值;u(k)
--------比例放大系数;KP
KTPS-------积分放大系数,;K,KIPTI
KTPD------微分放大系数,;K,KDDTS
-------采样周期。
TS
式(3-7)是数字PID算法的非递推形式,称全量算法。
算法中,为了求和,必须将系统偏差的全部过去值e(j)(j=1,2,3,…,k)都存储器来。
这种算法得出控制量的全量输出u(k),是控制量的绝对数值。
在控制系统中,这种控制量确定了执行机构的位置,例如在阀门控制中,这种算法的输出对应了阀门的位置(开度)。
所以,将这种算法成为“位置算法”。
2.3增量式控制算法:
当执行机构需要的不是控制量的绝对值,而使控制量的增量(例如去驱动步进电机)时,需要PID的“增量算法”。
由位置算法求出
k
u(k),Ke(k),Ke(j),K(e(k),e(k,1))],u,PID0
j0,
再求出
k1,
u(k,1),Ke(k,1),Ke(j),K(e(k,1),e(k,2))],u,PID0j0,
两式相减,得出控制量的增量算法
TTSD,u(k),u(k),u(k,1),K{e(k),e(k,1),e(k),[(e(k),2e(k,1),e(k,2)]}PTTIS
(3-8)
式(3-8)称为增量式PID算法。
对增量式PID算法(3-8)归并后,得
(3-9),u(k),qe(k),qe(k,1),qe(k,2)012
其中
TTSDq,K,,[1]0PTTIS
TDq,,K,[12]1PTS
TDq,KP0TS
(3-9)已看不出是PID的表达式了,也看不出P、I、D作用的直接关系,只表示了各次误差量对控制作用的影响。
从式(3-9)看出,数字增量式PID算法,只要储存最近的三个误差采样值e(k)、e(k-1)、e(k-2)就足够了。
三、PID参数对控制精度的影响
比例作用P只与偏差成正比;积分作用I是偏差对时间的积累;微分作用D是偏差的
变化率。
自动调节系统中当干扰出现时微分D立即起作用,P随偏差的增大而明显起来,两者首先起克服偏差的作用,而被控量在新值上稳定,此稳定值与设定值只差叫余差,而I随时间增加逐渐增强,直至克服掉余差,使被控量重新返回设定值上来。
比例(P)控制:
比例控制能迅速反应误差,从而减小稳态误差。
但是,比例控制不能消除稳态误差。
比例放大系数的加大,会引起系统的不稳定。
积分控制的作用是,只要系统有误差存在,积分控制器就不断地积累,输出控制量,以消除误差。
因而,只要有足够的时间,积分控制将能完全消除误差,使系统误差为零,从而消除稳态误差。
积分作用太强会使系统超调加大,甚至使系统出现振荡。
微分控制可以减小超调量,克服振荡,使系统的稳定性提高,同时加快系统的动态响应速度,减小调整时间,从而改善系统的动态性能。
只有比例运算规律的调节器为P调节器(当调节器无积分作用或无微分作用时),此时比例作用T,,T,0ID
及时迅速,这是它的一个显著特点,但是这种调节器用在控制系统中,会使系统出现余差,为了减少余差,可以增大K,K愈大余差愈小;但K增大将使系统的稳定性变差,容PPP
易产生振荡。
一般用在干扰较小,允许有余差的系统中。
比例控制是一种最简单的控制方式。
其控制器的输出与输入误差信号成比例关系。
当仅有比例控制时系统输出存在稳态误差(Steady-stateerror)。
积分(I)控制:
在积分控制中,控制器的输出与输入误差信号的积分成正比关系。
对一个自动控制系统,如果在进入稳态后存在稳态误差,则称这个控制系统是有稳态误差的系统或简称有差系统(SystemwithSteady-stateError)。
为了消除稳态误差,在控制器中必须引入“积分项”。
积分项对误差取决于时间的积分,随着时间的增加,积分项会增大。
这样,即便误差很小,
积分项也会随着时间的增加而加大,他推动控制器的输出增大使稳态误差进一步减小,直到等于零。
因此,比例+积分(PI)控制器,可以使系统在进入稳态后无稳态误差。
由于积分作用输出随时间积累而逐渐增大,故调节作用缓慢,这样会造成调节不及时,使系统稳定裕度下降。
因此积分作用一般不单独作用,而是与比例作用组合起来构成PI调节器,用于控制系统中。
微分(D)控制:
在微分控制中,控制器的输出与输入误差信号的微分(即误差的变化率)成正比关系。
自动控制系统在克服误差的调节过程中可能会出现振荡甚至失稳。
其原因是由于存在有较大惯性组件(环节)或有滞后(Delay)组件,具有抑制误差的作用,其变化总是落后于误差的变化。
解决的变法是使抑制误差的作用的变化“超前”,即在误差接近零时,抑制误差的作用就应该是零。
这就是说,在控制器中仅引入“比例”作用往往是不够的,比例项的作用仅仅是放大误差的幅值,而目前需要增加的就是“微分项”,它能预测误差变化的趋势,这样,具有比例+微分的控制器,就能够提前使抑制误差的控制作用等于零,甚至为负值,从而避免了被控量的严重超调。
所以对有较大惯性或滞后的被控对象,比例+微分(PD)控制器能改善系统在调节过程中的动态特性。
比例积分(PI)控制:
具有比例积分运算规律的调节器为PI调节器(当调节器无微分作用时)。
只要T,0D有偏差存在,积分作用的输出就会随时间不断变化,直到偏差消除,调节器的输出才会稳定下来,这就是积分作用能消除余差的原因。
积分作用输出变化的快慢与输入偏差e的大小成正比,而与积分时间成反比,愈短积分速度愈快,积分作用愈强。
TTII
应用PID控制,必须适当地调整比例放大系数,积分时间和微分时间,使整KTTPDI
个控制系统得到良好的性能。
四、PID参数整定
4.1PID参数的整定
数字PID控制器控制参数的选择,可按连续时间PID参数整定方法进行。
在选择数字PID参数之前,首先应该确定控制器结构。
对允许有静差(或稳态误差)的系统,可以适当选择P或PD控制器,使稳态误差在允许的范围内。
对必须消除稳态误差的系统,应选择包含积分控制的PI或PID控制器。
一般来说,PI、PID和P控制器应用较多。
对于有滞后的对象,往往都加入微分控制。
选择参数:
控制器结构确定之后,即可开始选择参数。
参数的选择,要根据受控对象的具体特性和对控制系统的性能要求进行。
工程上,一般要求整个闭环系统是稳定的,对给定量的变化能迅速响应并且平滑跟踪,超调量小;在不同干扰作用下,能保证被控量在给定值;当环境参数发生变化时,整个系统能保持稳定,等等。
这些要求,对控制系统自身性能来说,有些事矛盾的。
我们必须满足主要的方面的要求,兼顾其他方面,适当地折衷处理。
PID控制器的参数整定是控制系统的核心内容。
它是根据被控过程的特性确定PID控制器的比例系数、积分时间和微分时间的大小。
PID控制器参数整定的方法很多,概括起来有两大类:
一是理论计算整定法。
它主要是依据系统的数学模型,经过理论计算确定控制器参数。
这种方法所得到的计算数据未必可以直接使用,还必须通过工程实践进行调整和修改。
二是工程整定方法,它主要依赖工程经验,直接在控制系统的实验中进行,且方法简单、易于掌握,在工程实际中被广泛采用。
PID控制器参数的工程整定方法,主要有临界比例法、反应曲线法和衰减法。
三种方法各有其特点,其共同点都是通过试验,然后按照工程经验公式对控制器参数进行整定。
但无论采用哪一种方法所得到的控制器参数,都需要在实际运行中进行最后调整和完善。
现在一般采用的是临界比例法。
利用该方法进行PID控制器参数的整定步骤如下:
(1)首先预选择一个足够短的采样周期让系统工作;
(2)仅加入比例控制环节,直到系统对输入的阶跃响应出现临界振荡,记下这时的比例放大系数和临界振荡周期;(3)在一定的控制度下通过公式计算得到PID控制器的参数。
PID控制器的参数整定,可以不依赖于受控对象的数学模型。
工程上,PID控制器的参数常常是通过实验来确定,通过试凑,或者通过实验经验公式来确定。
4.2采样周期的选择
采样周期:
采样一数据控制系统中,设采样周期为,采样速率为,采样角1/TTTSSS
频率为。
采样周期是设计者要精心选择的重要参数,系统的性能与采样周,,2,/TTSSS
期的选择有密切的关系。
考虑因素:
采样周期的选择受多方面因素的影响,主要考虑的因素分析如下。
(1)香农(Shannon)采样定理
(——被采样信号的上限角频率),T,Smax,max
给出了采样周期的上限。
满足这一定理,采样信号方可恢复或近似恢复为原模拟信号,而不丢失主要信息。
在这个限制范围内,采样周期越小,采样-数据控制系统的性能越接近于连续时间控制系统。
(2)闭环系统对给定信号的跟踪,要求采样周期要小。
(3)从抑制扰动的要求来说,采样周期应该选择得小些。
(4)从执行元件的要求来看,有时要求输入控制信号要保持一定的宽度。
(5)从计算机精度考虑,采样周期不宜过短。
(6)从系统成本上考虑,希望采样周期越长越好。
综合上述各因素,选择采样周期,应在满足控制系统的性能要求的条件下,尽可能地选择低的采样速率。
工业控制中,大量的受控对象都具有低通的性质。
下面图给出了选择采样周期的经验。
下表给出了常用被控量的经验采样周期
采样周期的选择,要根据所设计的系统的具体情况,用试凑的方法,在试凑过程中根据这种合理的建议来预选采样周期,多次试凑,选择性能较好的一个作为最后的采样周期。
4.3PID调整口诀
PID调节器实际是一个放大系数可自动调节的放大器,动态时,放大系数较低,是为了防止系统出现超调与振荡。
静态时,放大系数较高,可以捕捉到小误差信号,提高控制精度。
PID参数的设定:
是靠经验及工艺的熟悉,参考测量值跟踪与设定值曲线,从而调整P\I\D的大小。
PID控制器参数的工程整定,各种调节系统中P.I.D参数经验数据以下可参照:
温度T:
P=20~60%,I=180~600s,D=3~180s压力P:
P=30~70%,I=24~180s液位L:
P=20~80%,I=60~300s流量L:
P=40~100%,I=6~60s书上的常用口诀:
参数整定找最佳,从小到大顺序查先是比例后积分,最后再把微分加曲线振荡很频繁,比例度盘要放大曲线漂浮绕大湾,比例度盘往小扳曲线偏离回复慢,积分时间往下降曲线波动周期长,积分时间再加长曲线振荡频率快,先把微分降下来差动大来波动慢,微分时间应加长理想曲线两个波,前高后低4比1


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- pid 控制 原理
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 对中国城市家庭的教育投资行为的理论和实证研究.docx
对中国城市家庭的教育投资行为的理论和实证研究.docx
-
二年级下册数学练习题大全.docx
-
二十年后回故乡的优秀作文.docx
-
软基换填施工方案.docx
-
《黑白装饰画》教案.docx
-
课堂教学改革实施方案5篇.docx
-
返璞归真简约致美解读《给予树》教学设计语文.docx
-
离职证明范本精选多篇.docx
-
《天局》全文.docx
-
我害怕作文集合15篇.docx
-
伏魔战记39详细攻略.docx
-
幼儿园学期计划.docx
-
雅思分类打印版Word格式文档下载.docx
-
年产1万吨竹子纤维加工项目可行性研究报告文档格式.docx
-
电商产业化项目投资经营商业计划书Word文件下载.docx
-
医学多媒体课件的设计与制作Word文档格式.docx
-
中学生中秋节想象作文Word格式.docx
-
等保20之漏洞扫描系统技术方案建议书Word文档格式.docx
-
培训学校个人工作计划模板5篇Word格式.docx
-
北京各区二模试题分类汇编文言文阅读Word文档下载推荐.docx
-
不同职业病危害因素的防护常识Word格式文档下载.docx
-
一年级上册同音形近字练习汇总Word文档格式.docx
-
班级家长会上班主任教师讲话稿Word下载.docx
-
科斯塔环载波恢复Word文件下载.docx
-
浙教义务版六年级语文下册教案 花潮Word文件下载.docx
-
集成电路设计与集成系统专业Word格式文档下载.docx
-
开工第一课专题讲座观后感文档格式.docx
-
东城区学年第一学期高三期末化学试题及答案Word格式文档下载.docx
-
苏教版六年级语文下册第七单元测试题Word格式文档下载.docx
-
学长征精神做红色传人活动方案文档格式.docx
-
读书笔记150字30篇文档格式.docx
-
中级经济法考前必背法条精华版备考资料Word格式.docx
-
山西省临汾第一中学学年高一下学期期中考试语文试题.docx
-
设备设施保养计划AA.docx
-
商标法知识竞赛试题库及答案130题.docx
-
离散上机.docx
-
社会意识相对独立性原理及其对文化建设的作用.docx
-
理造句大全.docx
-
商业保理术语基本术语.docx
-
社团材料.docx
-
立磨及窑尾废气处理调试方案.docx
-
深圳市宝安区再生水系统管网详细规划.docx
-
上海牛津英语一年级下册第一单元教案.docx
-
审批事项受理单.docx
-
联想模板工程专项施工方案1.docx
-
上海危险化学品安全管理条例doc.docx
-
生活水罐组装施工技术方案40页word资料.docx
-
昆明制药资产负债表分析.docx
-
生物实验表格填写.docx
-
少儿节目策划共35页.docx
-
篮球培训班教案.docx
