 机械原理课后习题答案.docx
机械原理课后习题答案.docx
- 文档编号:6392468
- 上传时间:2023-01-06
- 格式:DOCX
- 页数:13
- 大小:158.30KB
机械原理课后习题答案.docx
《机械原理课后习题答案.docx》由会员分享,可在线阅读,更多相关《机械原理课后习题答案.docx(13页珍藏版)》请在冰豆网上搜索。
机械原理课后习题答案
《机械原理》课后习题答案
第2章(P27)
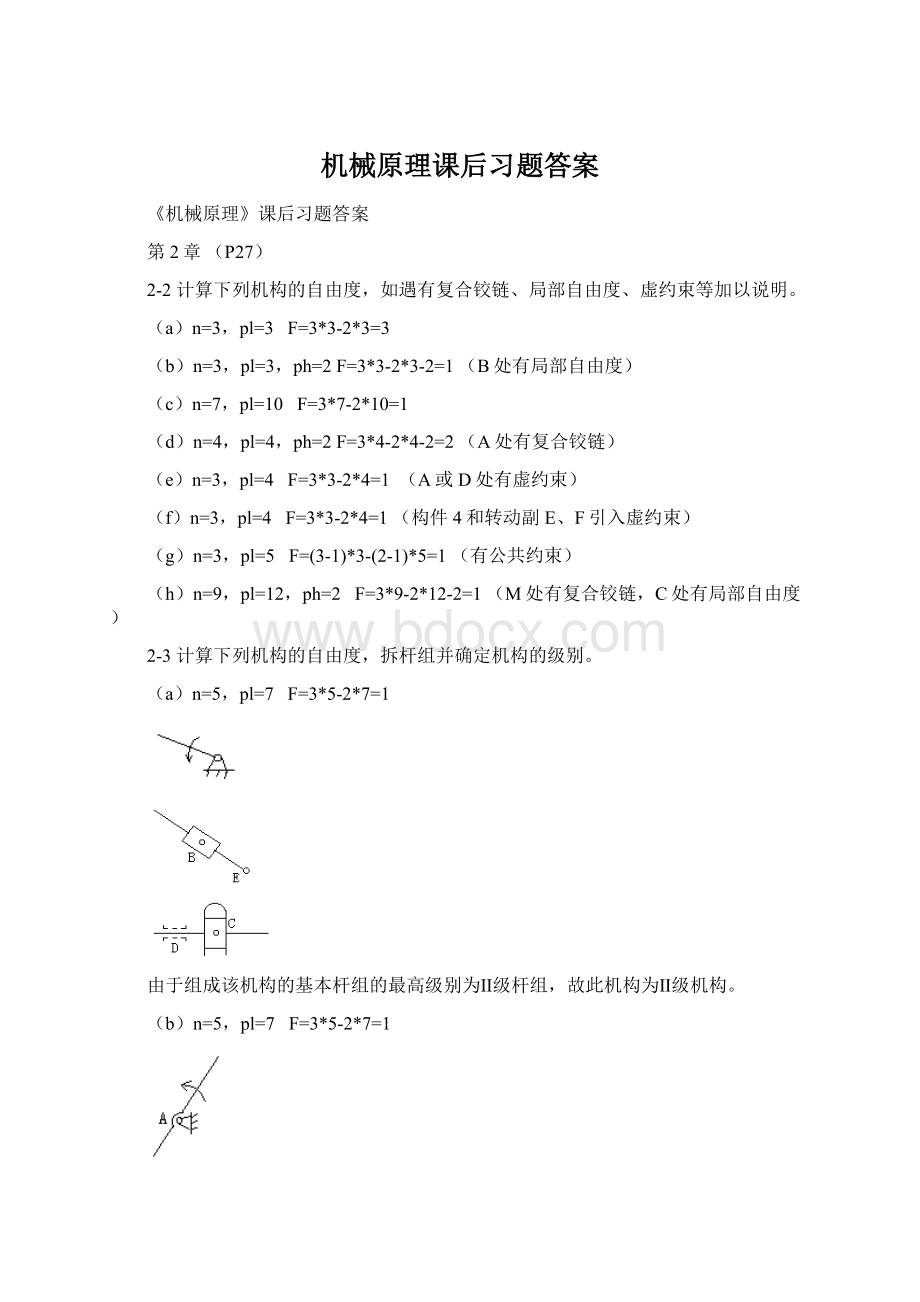
2-2计算下列机构的自由度,如遇有复合铰链、局部自由度、虚约束等加以说明。
(a)n=3,pl=3F=3*3-2*3=3
(b)n=3,pl=3,ph=2F=3*3-2*3-2=1(B处有局部自由度)
(c)n=7,pl=10F=3*7-2*10=1
(d)n=4,pl=4,ph=2F=3*4-2*4-2=2(A处有复合铰链)
(e)n=3,pl=4F=3*3-2*4=1(A或D处有虚约束)
(f)n=3,pl=4F=3*3-2*4=1(构件4和转动副E、F引入虚约束)
(g)n=3,pl=5F=(3-1)*3-(2-1)*5=1(有公共约束)
(h)n=9,pl=12,ph=2F=3*9-2*12-2=1(M处有复合铰链,C处有局部自由度)
2-3计算下列机构的自由度,拆杆组并确定机构的级别。
(a)n=5,pl=7F=3*5-2*7=1
由于组成该机构的基本杆组的最高级别为Ⅱ级杆组,故此机构为Ⅱ级机构。
(b)n=5,pl=7F=3*5-2*7=1
此机构为Ⅱ级机构。
(c)n=5,pl=7F=3*5-2*7=1
拆分时只须将主动件拆下,其它构件组成一个Ⅲ级杆组,故此机构为Ⅲ级机构。
2-4验算下列运动链的运动是否确定,并提出具有确定运动的修改方案。
(a)n=3,pl=4,ph=1F=3*3-2*4-1=0该运动链不能运动。
修改方案如下图所示:
或
(b)n=4,pl=6F=3*4-2*6=0该运动链不能运动。
修改方案如下图所示:
或
第3章(P42)
3-2下列机构中,已知机构尺寸,求在图示位置时的所有瞬心。
(a)(b)(c)
(a)v3=vP13=ω1P14P13μl
3-6在图示齿轮连杆机构中,三个圆互作纯滚,试利用相对瞬心P13来讨论轮1与轮3的传动比i13。
第5章(P80)
(1)∵a+d=3.5,b+c=4
∴a+d 又∵最短杆为连架杆 ∴此机构为曲柄摇杆机构,可以实现连续转动与往复摆动之间的运动变换。 5-2一铰接四杆机构 (2)机构的两极限位置如下图: (3)传动角最大和最小位置如下图: 5-3题略 解: 若使其成为曲柄摇杆机构,则最短杆必为连架杆,即a为最短杆。 所以此题有两种情况,即: (1)机架d为最长杆,则应满足a+d≤c+b d≤c+b-a=2.5+3-1=4.5 ∴dmax=4.5 (2)连杆b为最长杆,则应满足a+b≤c+d d≥a+b-c=1+3-2.5=1.5 ∴dmin=1.5 5-8题略 5-12题略 5-9设计一铰接四杆机构,要求主动的连架杆A0A逆钟向转120°,另一连架杆B0B顺钟向转90°,并要求在起始位置机构有最好的传力性能。 第6章(P100) 6-4题略 6-5题略 第7章(P132) 7-3rb=60mm,αi=20° 第7章(P132) 7-2解: ri=rb/cosαi=63.85mmρi=rbtanαi=21.84mm ∵αi=20°∴查表得θi=0.014904=0.85° 若θk=15°,则查表得αk=47°28′37″ rk=rb/cosαk=88.77mmρk=rbtanαk=65.43mm 7-3解: 已知KK′=11.84mm,ri=63.86mm,K′K″=12.60mm ∵θk′=θk″即∠A′OK′=∠AOK″ ∴∠A′OK′-∠AOK′=∠AOK″-∠AOK′ 即∠AOA′=∠K′OK″ AA′/rb=K′K″/ri=12.60/63.86=0.1973mm rb=AA′/0.1973=KK′/0.1973=60mm αi=arccos(rb/ri)=20° 7-5解: (1)略 (2)a=r1+r2=250mm 由acosα=a′cosα′得α′=arccos(250cos20°/255)=22.8920° N1N2=a′sinα′=99.2mm B1B2=rb2(tanαa2-tanα′)+rb1(tanαa1-tanα′)=33.7mm 其中,αa2=arccos(rb2/ra2)=28.24°αa1=arccos(rb1/ra1)=31.32° 7-7解: (1)ρmin=NG=sinα- (2)tanαG== (3)当ρmin=0,即sinα-=0 得Z===17 7-8解: 先计算r1、r2、rb1、rb2、ra1、ra2 (1)ρ1min=N1B1=N1N2-B1N2=(r1+r2)sinα-rb2tanαa2=7.253mm (2)ρmin=sinα-=4.964mm ρ1min>ρmin能正确啮合传动 (3)若ra2=410+0.1m=411mm则αa2=23.86° ρ1min=(100+400)sin20°-375.88tan23.86°=4.76mm ρ1min<ρmin不能正确啮合传动 7-10参见教材第121页[例7-3]。 第8章(P147) 8-2解: 这是一个定轴轮系 i15== i15== ∵n1=n1′,n5=n5′∴i15=i15 得=Z3≥17(为保证不根切的最小齿数) 8-4解: 根据同心条件得 Z3=Z1+2Z2=102,Z6=Z4+2Z5=102 H1 1,2,3,H1----行星轮系 i1H1=1-i13=1+Z3/Z1=4.4 4,5,6,H2----行星轮系 H2 i4H2=1-i46=1+Z6/Z4=4.4 ∵ωH1=ω4∴i1H2=i1H1·i4H2=4.4×4.4=19.36 8-5解: i13==-=-=-5① 当转向相同时,将n1=200r/min,n2=50r/min,代入①式, =-5解得nH=75r/min,系杆H的转向与n1转向相同。 当转向相反时,将n1=200r/min,n2=-50r/min,代入①式, =-5解得nH=-8.33r/min,系杆H的转向与n1转向相反。 8-10解: (a)i1H=1-i14=1- (b)i1H=1-i14=1+ (c)i1H=1-i14=1-Z4/Z1 (d)i1H=1-i14=1+Z4/Z1 (e)i1H=1-i13=1- (f)i1h=1-i13=1+Z3/Z1i4H=1-i46=1+Z6/Z4 ∵nh=n4∴i1H=i1h·i4H=(1+Z3/Z1)(1+Z6/Z4) 8-11解: 1,2,2′,3,H----差动轮系;3′,6′,6,5,4----定轴轮系。 i13==-① i36==-i46==- ∵n3=n3′n6=n6′nH=n4 ∴n3=-n6,nH=n6并将其代入①式,得 解得i16==13.3 i23===60/16② i34===-=-3/4 将n3=-3/4n4,nH=n4代入②式,得 解得i24=-5.56 8-12解: Z3=Z1+2Z2=80 i1H=1-i13=1+=5 i6H=1-i64=1-=1/50 i16==i1H/i6H=250 n6=n1/250=6r/min其转向与n1转向相同。 第11章(P190) 11-1倾斜剪刃的剪切机如图,如果剪刃与被切工件间摩擦系数f=0.12,试求剪刃的最大倾斜角度δ应为多少? 11-2轧钢机轧辊直径为1120mm,当辊距为1200mm,轧辊与钢坯间摩擦系数f=0.15时,可轧钢坯的最大厚度H是多少? 第12章(P210) 12-1解: ①机械系统的总动能为: E=1/2[JⅠω12+JⅡω22+W/g(ω2r)2] 等效构件所具有的动能为: Ee=1/2Jeω22 根据等效原则,即E=Ee 得Je=JⅠ(ω1/ω2)2+JⅡ+W/gr2=JⅠ(Z2/Z1)2+JⅡ+W/gr2 ②∵Ner=Wω2r∴Ter=Ner/ω2=Wr ③∵Wd=Wr即Nd=Nr Tdω1=Wω2r ∴Td=Wr(ω2/ω1)=Wr(Z1/Z2) 12-2解: ∵Ner=Qv3∴Ter=Ner/ω1=Qv3/ω1 用瞬心法求v3/ω1,需先找P13 ∵vp13=v3=ω1AP13∴v3/ω1=AP13 因此,Ter=QAP13 12-5由某原动机驱动的工作机构,对主轴转角的等效阻力矩Tr,如图所示。 设以主轴转角度量的周期为360º,主轴平均转速为620r/min,驱动力矩Td为常数。 (1)设等效转动惯量为常数,试画出稳定运转的一周期内角速度变化示意图; (2)不计原机构各构件的质量,计算飞轮的转动惯量Jf,许用运转不均匀系数[δ]=0.01; (3)求加上飞轮之后的主轴最高转速nmax和最低转速nmin。 解: (1)在稳定运转阶段有Wd=Wr 即 Td×360=1/2×200×(30+180) Td=58.33Nm 稳定运转的一周期内角速度变化曲线图如下: (2)根据等效力矩线图,画出其盈亏功变化图 (3)nmax=623.1r/minnmin=616.9r/min (注: 素材和资料部分来自网络,供参考。 请预览后才下载,期待你的好评与关注! )


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 机械 原理 课后 习题 答案
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 对中国城市家庭的教育投资行为的理论和实证研究.docx
对中国城市家庭的教育投资行为的理论和实证研究.docx
-
二年级下册数学练习题大全.docx
-
二十年后回故乡的优秀作文.docx
-
软基换填施工方案.docx
-
《黑白装饰画》教案.docx
-
课堂教学改革实施方案5篇.docx
-
返璞归真简约致美解读《给予树》教学设计语文.docx
-
离职证明范本精选多篇.docx
-
《天局》全文.docx
-
我害怕作文集合15篇.docx
-
伏魔战记39详细攻略.docx
-
幼儿园学期计划.docx
-
雅思分类打印版Word格式文档下载.docx
-
年产1万吨竹子纤维加工项目可行性研究报告文档格式.docx
-
电商产业化项目投资经营商业计划书Word文件下载.docx
-
医学多媒体课件的设计与制作Word文档格式.docx
-
中学生中秋节想象作文Word格式.docx
-
等保20之漏洞扫描系统技术方案建议书Word文档格式.docx
-
培训学校个人工作计划模板5篇Word格式.docx
-
北京各区二模试题分类汇编文言文阅读Word文档下载推荐.docx
-
不同职业病危害因素的防护常识Word格式文档下载.docx
-
一年级上册同音形近字练习汇总Word文档格式.docx
-
班级家长会上班主任教师讲话稿Word下载.docx
-
科斯塔环载波恢复Word文件下载.docx
-
浙教义务版六年级语文下册教案 花潮Word文件下载.docx
-
集成电路设计与集成系统专业Word格式文档下载.docx
-
开工第一课专题讲座观后感文档格式.docx
-
东城区学年第一学期高三期末化学试题及答案Word格式文档下载.docx
-
苏教版六年级语文下册第七单元测试题Word格式文档下载.docx
-
学长征精神做红色传人活动方案文档格式.docx
-
读书笔记150字30篇文档格式.docx
-
中级经济法考前必背法条精华版备考资料Word格式.docx
-
河北省促进科技成果转化条例文档2篇Word格式文档下载.docx
-
技术部资料员个人工作总结Word文档格式.docx
-
毛概 考试重点Word文档下载推荐.docx
-
行政事业单位会计制度docWord文件下载.docx
-
环境法学试题DOCWord格式文档下载.docx
-
泌尿外科考试重点Word文档下载推荐.docx
-
贵州省教师资格证中学教育学复习资料全Word格式.docx
-
奶茶店规章管理制度Word格式文档下载.docx
-
建筑施工安全事故案例分析Word文档下载推荐.docx
-
基础会计实务形考答案新Word格式.docx
-
年 仓 储 烘 干 五 千 万 公 斤 粮食Word格式.docx
-
培训自我鉴定合集8篇文档格式.docx
-
和谐劳动关系企业工作总结汇报三篇 人社 劳动关系总结Word格式.docx
-
供水管道工先进事迹共5篇Word格式文档下载.docx
-
课堂教学技能多选题文档格式.docx
-
国民经济行业分类明细Word文档格式.docx
-
农村中小学校本课程开发文档格式.docx
-
开好招商订货会的三个关键方法Word文档下载推荐.docx
-
劳动周心得体会文档格式.docx
