 西门子810D调机说明1.docx
西门子810D调机说明1.docx
- 文档编号:6323180
- 上传时间:2023-01-05
- 格式:DOCX
- 页数:15
- 大小:355.74KB
西门子810D调机说明1.docx
《西门子810D调机说明1.docx》由会员分享,可在线阅读,更多相关《西门子810D调机说明1.docx(15页珍藏版)》请在冰豆网上搜索。
西门子810D调机说明1
西門子810D調機說明
壹、調整速度回路共振頻率
MD1407
MD1409
MD1200
MD1201
MD1202
MD1213…
貳、調整位置回路POSITIONGAIN(MD32200)
1.MDI程式
AA:
G0X300
G4F1
X350
G4F1
GOTOBAA
2.到SERVOTRACE功能監視
TRACE1:
X軸POSITIONSETPOINT
TRACE2:
X軸POSITIONactualvaluemeasurmentsystem1
3.調整MD32200在10%,50%,100%下TRACE2不會OVERSHOUT
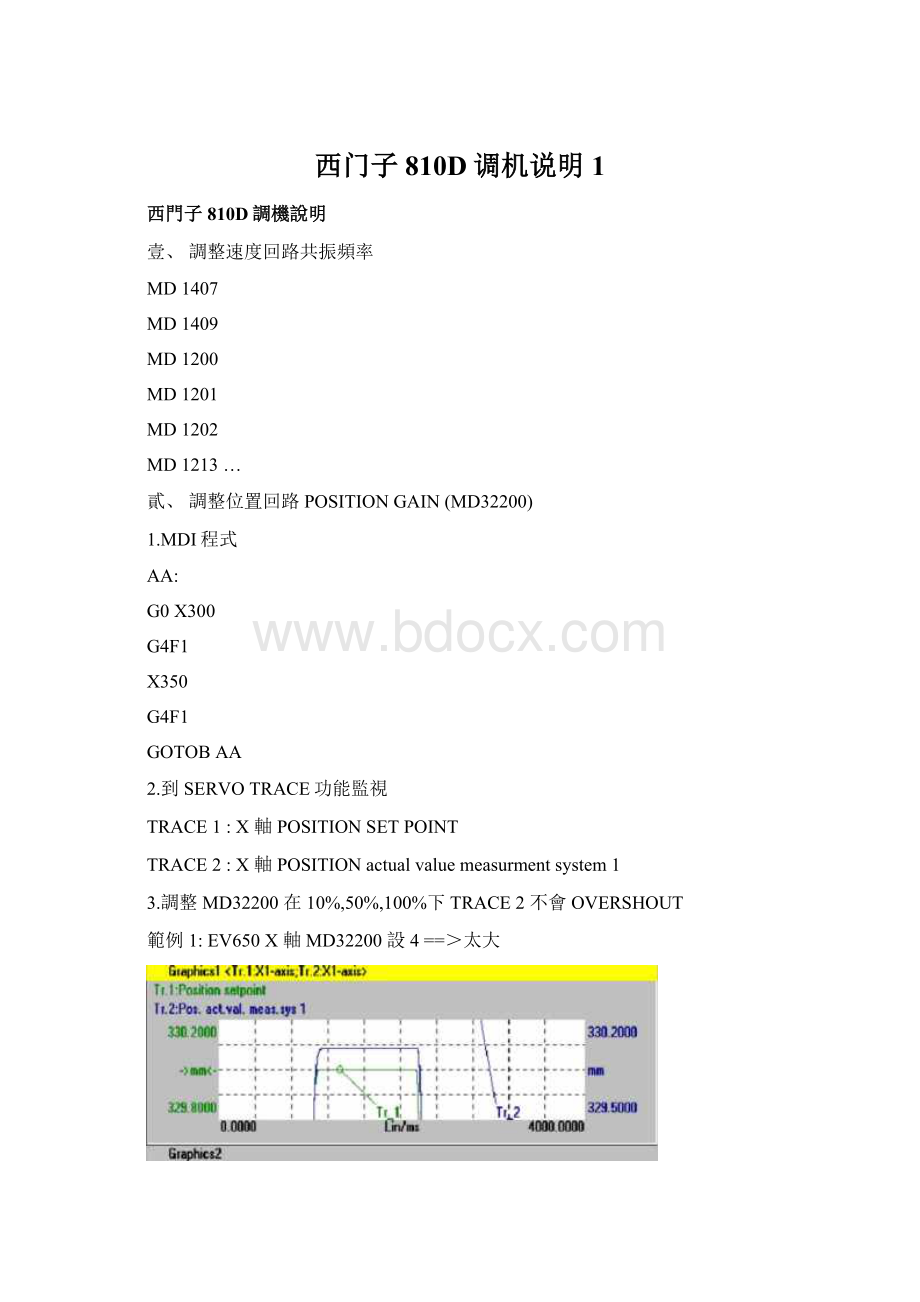
範例1:
EV650X軸MD32200設4==>太大
範例2:
EV650X軸MD32200設1==>太小
Graphicsl X1-aKis;Tr.2: X1-aiis> 「八一八-! ■■■「—・・丁・ 範例3: EV650X軸MD32200設3.5太大,斜率太陡 Graphics1 X1-axitjr.2: X1-axis> Tr.1Positionsetpoint Tr.2;PQT,act.valmea? tsjs1 範例4: EV650X軸設2.5剛好 Graphics1 Xbatis> Tr.1Positionsetpoint Tr.2: Poract.yak・e韓wysT 範例5: EV650Y軸設2.5太大,OVERSHOUT Graphicsl Yl-axix: Tr.2: Yl-axis> Tr.1: Positionsetpoint Tr.2: Pot.act.val.meassys1 範例6: EV650Y軸MD32200設1,落後太多 Graphics1 Y1-axitjr.2: Y1-axis> Ti.lPositionsetpoint Tr.2;PQi・act.Yal1 範例7: EV650MD32200設3剛好 Graphicsl Y1-anitjr.2: Y1-aiis> Tr.1: Pocitiansetpoint ®宜3EV650YaMD32200羽4HH B亍pho'HlmY」&«.«1>2Y1山xg' mpgs-rk量pp= ®宜9EV650NaMD32200羽3汁汁 G-shs'lHiKJl山s-;T「.2KJr旻5■ T-IP盘-mmC4®.po= T-2P杲削CLVal.me巽噹1 4SSS 4s・i 心i〈・ 3S9MM 3S19M0 os吕 isl 範例10: EV650Z軸MD32200設2.5,在100%,50%都正常,在10%時不良 Graphics! Tr.2: Z1-aii£> Ti.lPositionsetpoint Tr.2: Pos.actval.measlys1 4.三軸調整完成後,取三軸中最小值的那軸當作設定值,如: EV650MD32200[X]=2.5,MD32200[Y]=3,MD32200[Z]=2需設為MD32200[X]=2,MD32200[Y]=2,MD32200[Z]=2 Z軸MD32200[1]需與主軸MD32200[1]設定一致,剛性攻牙才會準確 5.被修正的軸,如上述的X軸及丫軸,都需重新在 10%,50%,100%的速度下確認一次 強昭L人: ◎丄冽贬1人: 「」nI切q血旧 iMO境92<-91,甲60怦Gl/\l\<~Z甲上0琳Gl/\l霹寵變重’丄nOHSd3AO? <-£甲00乙駝GIAI#人099A3: 那岡釀 ]iflod]9suuqrsQ詁: l』] ZJi-^1®-l)CTJPpoiqdpig >102<-92甲00乙駝Gl/\l#X099A3: LL岡釀 參、調整加減速MD32300 1.將MDI程式由移動50mm加大至全行程,使軸移動能達到最大速度 2.用SERVOTRACE監視: TRACE1: TORQUEPRODCURRENTACTUALVALUETRACE2: ACTUALVELOCITY 調整TRACE1的最大值至最大不超過MD1104或MD1107除以1.414的80% 範例1: EV650Z軸MD32300由1.2->2.5 GraphicaldrlZI-axisJr.2: Z1-axi? > 11.3/1.414=7.9A MD1104=22A=>22/1.414=15A(AMP與馬達兩者取最小) 15*0.8=12A最大不能超過12A,否則,馬達或驅動器易壞 3.用最大重量負載測試一次 4.再測試位置回路有無OVERSHOUT 範例14: EV650Y軸MD32300由1.2->3.5,100%時會到12A負載,太大! 肆、調整JERK(MD32431) 1.MDI程式修改為 G60SOFTFFWON AA: G0X300 G4F1 X350 G4F1 GOTOBAA 2.記錄MD36400,MD36000,MD36010,MD32200,MD32810的設定值 3.用SERVOTRACE: TRACE1: POS.ACTUALVALUEMEAS.SYSTEM1調整MD36400直至不會OVERSHOUT 4.將MD36400放大至10mm MD36000放大至0.4或1 MD36010放大至0.1 MD32200設0 MD32810設0 才開始進行調整程序 5.調整完成,需將步驟4的舊值設回 iyoloA—0寸®o寸0COQIAI®A099>山cb二金w 11 HV 11 ■1 11 11 4000.0000 1| 11 11 HV 11 IL— h1 11 V| h1 11 l! 1 B1 hI 11 VI ii HV l! 1 B1 hI r"—"■™"■ __—-~~— — 11 11 J -1 二1— C •-i-—-—-—-i-=■片 H|1 11 11 h1 11 -厂~11 h1 11 HV 11 11 11 11 11 h1 C 'a 350.1150 11一 V| i 7 左 £ | 恤+<0寸掘o寸CXIeQIAl«>099>山GL匡« 範例17: EV650Z軸MD32431設50太大! Giaphicsl Ti.1: Pot.advd.me^«.1 249.9900;; Il[1 IlII r 11J 11II 11[1 ■1I 11 1|| I[| 11 ~I~~1- H[1 li •丄…L 11I 11II 111 : ;1 11 ■------- lil iia H1 ->mm pa _.i_.」. .1. 广 1|| 11II 111 ! 11 11[| _1..」_--JL, 1II 1» H1 1|| 1[| .___L___1-_- iii li1 HII h1 IiI »1 11 I1 11 11 H1 11 11| i1 11 11 B1 IiI 249.9700: : ||1 BI iI ii ii ii ii ll \: i! TrJ: ;: 111 11J 丨1 11 11| 11 11 11 00000 Lin/ms 4000.0000 範例18: EV650Z軸MD32431設25,在100%,50%都可以,但,在10%時太大! Graphical Zl-axis> Ti.kPos.ad.val.meas.sys1 249.9000;;;1 1 III 1II nnni-> I11I1111| 111 111 111 111 : : : 1 : : : \ ->nwn<-11111 ii1丨 ii」. 1II il! 1.l_」. ■r■—*i'■*■■*8 iii 1ii aii iii Iii jq.L.■…l_. na1hiiiiiiiiiiipainai 1i Il| Ill IIll Illl [|ll [|ll iiii pai 243.9500;;: | TrJ: ; 1Ii 1Ii 1ll[|1l[|llllllll[|1| O.OOOQLiruW4000.0000 範例19: EV650Z軸MD32431設15,10%~100%OK! Graphicsl Ti.IiPoe.actvaL1 249.9000;;: ;: ;;; 伍、調整FFW(MD32810) 1.用SERVOTRACE監視: TRACE1: POS.SETPOINT TRACE2: POS.ACTUALVALUEMEAS.SYSTEM1 TRACE3: POS.SETPOINT TRACE4: COUNTURDEVACT 2.調整MD32810至TRACE4的值為最小 3.調整後三軸需設定一致 範例20: EV650MD32810設0.0025,MD32431設15 Graphics? Tr.3: Positionsetpoint Ir.4: Contourdeviation 範例21: EV650MD32810設0.001,MD32431設10Graphical Z1-axit> Tr.lPojitiansetpoint Tl2;Po? itk諷那1 250.0200 -0.0180 Graphics? 21-axis;! r.4: Z1-axis>Tr3: Podtionsetpoint noim 伍、循圓測試 1.執行BALLBAR程式 2.用CIRCLETEST 3.RADIUS設150,FEED設程式速度 4.檢查是否正圓 範例22: EV650X/Y軸循圓 -Parameter Radius Feedrate; tin氐 Repiewntation Resolution RpprerenL: Radius DeltaR: Y1activemeai. .034 150.000mm 1000.000mn/min 56549ms |盘|mm/giad. Moanradius 150.000mn G8.525痉 XIactivemea«.system 後註: EV06070這台機台在後續的品管循圓中發現,當MD1407設1時,上圖Y軸方向的循圓尖點無法補償,循圓誤差一直維持在6條以上,維持其它已調機的參數,將MD1407由1改為2,循圓尖點立即可被補償,最後調整結果為0.6條,所以,Y軸SPEEDGAIN不能設太小,會讓控制器無法以微量調整循圓尖點!


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 西门子 810 说明
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 对中国城市家庭的教育投资行为的理论和实证研究.docx
对中国城市家庭的教育投资行为的理论和实证研究.docx
-
二年级下册数学练习题大全.docx
-
二十年后回故乡的优秀作文.docx
-
软基换填施工方案.docx
-
《黑白装饰画》教案.docx
-
课堂教学改革实施方案5篇.docx
-
返璞归真简约致美解读《给予树》教学设计语文.docx
-
离职证明范本精选多篇.docx
-
《天局》全文.docx
-
我害怕作文集合15篇.docx
-
伏魔战记39详细攻略.docx
-
幼儿园学期计划.docx
-
雅思分类打印版Word格式文档下载.docx
-
年产1万吨竹子纤维加工项目可行性研究报告文档格式.docx
-
电商产业化项目投资经营商业计划书Word文件下载.docx
-
医学多媒体课件的设计与制作Word文档格式.docx
-
中学生中秋节想象作文Word格式.docx
-
等保20之漏洞扫描系统技术方案建议书Word文档格式.docx
-
培训学校个人工作计划模板5篇Word格式.docx
-
北京各区二模试题分类汇编文言文阅读Word文档下载推荐.docx
-
不同职业病危害因素的防护常识Word格式文档下载.docx
-
一年级上册同音形近字练习汇总Word文档格式.docx
-
班级家长会上班主任教师讲话稿Word下载.docx
-
科斯塔环载波恢复Word文件下载.docx
-
浙教义务版六年级语文下册教案 花潮Word文件下载.docx
-
集成电路设计与集成系统专业Word格式文档下载.docx
-
开工第一课专题讲座观后感文档格式.docx
-
东城区学年第一学期高三期末化学试题及答案Word格式文档下载.docx
-
苏教版六年级语文下册第七单元测试题Word格式文档下载.docx
-
学长征精神做红色传人活动方案文档格式.docx
-
读书笔记150字30篇文档格式.docx
-
中级经济法考前必背法条精华版备考资料Word格式.docx
-
肇庆市政府工作报告全文.docx
-
浅谈广西罗城仫佬族民俗文化.docx
-
参考文档初中生入学教育总结精选多篇word版本 14页.docx
-
施工现场临时设施标准补充图集.docx
-
日光温室大棚施工组织设计.docx
-
燃煤锅炉烟气的除尘脱硫工艺设计.docx
-
简短获奖感言说范文.docx
-
生产管理制度范本6份.docx
-
干货初中语文思维导图最全汇总.docx
-
省气象设施和气象探测环境保护办法3.docx
-
供氧设备施工组织设计.docx
-
管理学课后题.docx
-
国家标准循环经济技术规范 铜冶炼烟灰提取有价金属编制说明讨论稿doc.docx
-
实用参考关于成立团委的请示.docx
-
黑龙江省水利建设十二五规划.docx
-
安全主题班会讲稿.doc
-
护士基础护理学模拟试题及答案.docx
-
环境化学复习题.docx
-
图书馆温馨提示语合集15篇.docx
