 计算机控制技术作业题.doc
计算机控制技术作业题.doc
- 文档编号:625699
- 上传时间:2022-10-11
- 格式:DOC
- 页数:6
- 大小:509.50KB
计算机控制技术作业题.doc
《计算机控制技术作业题.doc》由会员分享,可在线阅读,更多相关《计算机控制技术作业题.doc(6页珍藏版)》请在冰豆网上搜索。
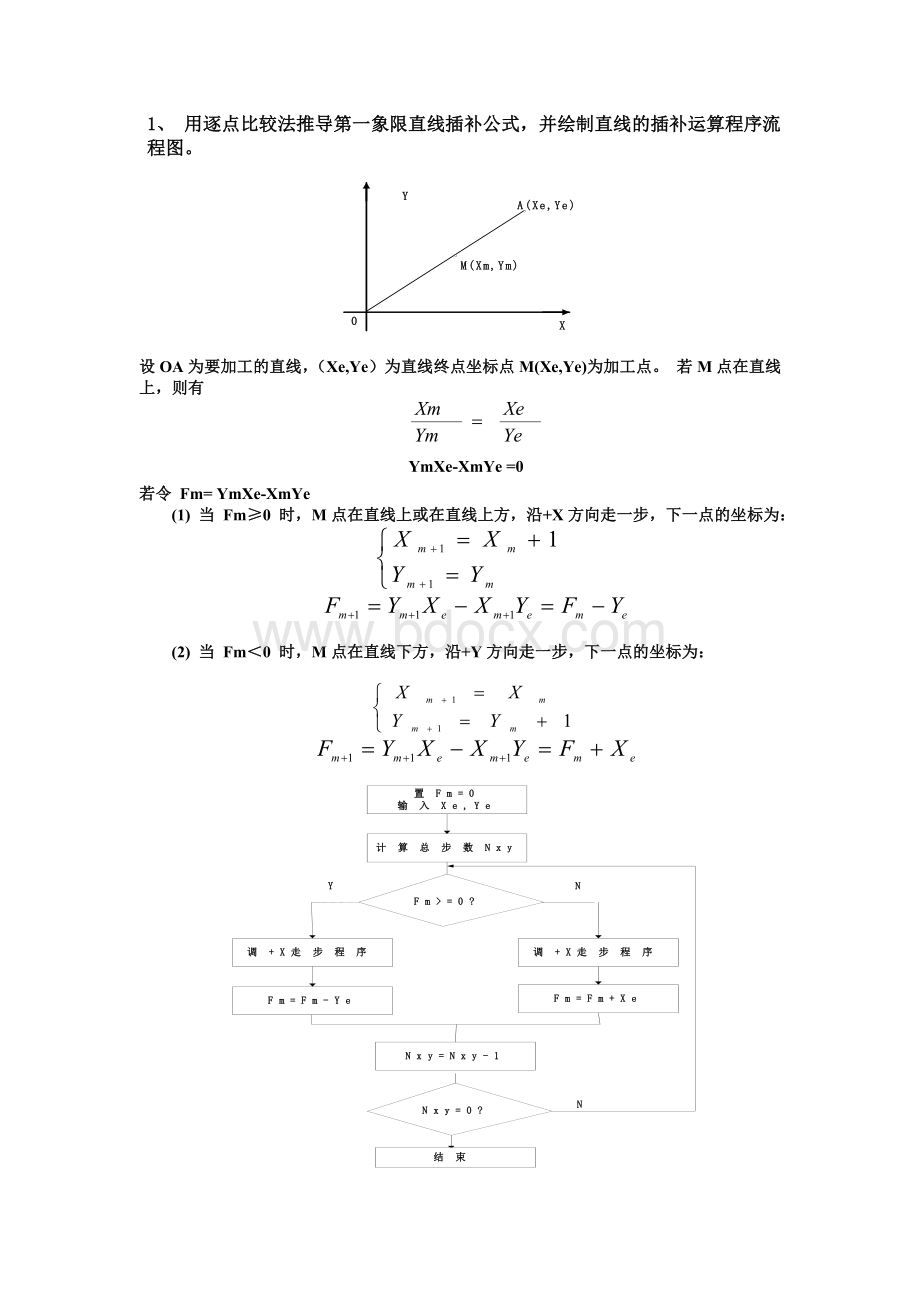
1、用逐点比较法推导第一象限直线插补公式,并绘制直线的插补运算程序流程图。
设OA为要加工的直线,(Xe,Ye)为直线终点坐标点M(Xe,Ye)为加工点。
若M点在直线上,则有
YmXe-XmYe=0
若令Fm=YmXe-XmYe
(1)当Fm≥0时,M点在直线上或在直线上方,沿+X方向走一步,下一点的坐标为:
(2)当Fm<0时,M点在直线下方,沿+Y方向走一步,下一点的坐标为:
2、已知某控制系统模拟控制器的传递函数为
若采样周期T=1S,试写出相应数字控制器的位置型和增量型控制算式。
并比较两种算法特点。
将T=1代入上式,得
3、
(1)最少拍有纹波数字控制器和最少拍无纹波数字控制器设计中对闭环脉冲传函Φ(Z)的要求有什么区别?
最少拍有纹波数字控制器设计中,要求Φ(Z)包含G(Z)中单位园外的零
点;而最少拍无纹波数字控制器设计中,要求Φ(Z)的要求包含G(Z)中所有的零点。
(2)设对象的脉冲传递函数为:
试对单位阶跃输入设计最少拍无纹波数字控制器。
由G(z)得知:
d=0,q=1,v=1,w=1,j=1,且j=q,则有
m=w+d=1
n=v-j+q=1
选择
由
得出
4、画出典型计算机控制系统的基本框图。
说明计算机控制系统的工作原理。
实时数据采集(A/D);实时控制决策(算法);实时控制输出(D/A)
5、谈谈光电耦合器的结构、作用、用法。
当输入侧(即发光二极管)流过一定的电流IF时,发光二极管开始发光,它触发光敏三极管使其导通;当撤去该电流时,发光二极管熄灭、三极管截止。
这样,就实现了以光路来传递信号,保证了两侧电路没有电气联系,从而达到了隔离的
6、分析监督定时器工作原理。
电源故障;程序跑飞、死循环。
7、对于含有纯滞后的对象,设计控制器时可以采用哪些方法?
并说明算法的设计思想。
改进型PID、大林算法、史密斯预估算法。
8、给出计控系统模入通道的典型组成结构,说明各部分作用。
信号调理、放大、滤波、采样保持、A/D、I/O接口
9、设计DAC0832双极性输出电路,输出范围为(-5V~+5V)。
要求推导出输出电压计算公式,并指出基准参考电压Vref取什么电压值?
若D为输入数字量,则有
因为要保证D=255对应+5V,D=0对应-5V。
所以Vref应取+5V。
10、写出第一象限逐点比较法直线差补算法结构:
11、已知采样周期为1秒,写出数字PID控制器增量式算
式和位置式算式,并说明各自的特点。
后向差分法
12、按达林算法设计的某系统的控制器为,
1、本系统是否存在振铃现象?
为什么?
2、若存在振铃现象,设计
消除振铃的控制器;若无振铃现象,写出控制输出u(k)。
有振铃现象,D(z)的分母为,含有z=-0.9的极点,靠近-1,为振铃因子。
消除的方法为把D(z)中因子的z=1,
可得
13、为什么说增量型PID控制器调节比位置型PID调节效果更好?
二者的区别是什么?
答:
增量式只输出控制增量,即执行机构位置的变化部分,因而误动作影响小,用于执行器具有积分作用的场合,在i时刻的输出ui,只需用到此时刻的偏差,以及前一时刻,前两时刻的偏差ei-1,ei-2和前一次的输出值ui-1,这大大节约了内存和计算时间;位置方式的控制输出对应执行器的位置,而且其输出与前面所有时刻的偏差有关,容易产生累计误差和误动作。
14、填空:
1.计算机各模块之间互联和传送信息(指令、地址和数据)的一组信号线就是总线。
2.在模拟量输入中,信号调理电路是传感器和A/D之间的桥梁;在模拟量输出通道中,信号调理电路是D/A和执行机构的桥梁。
3.D/A变换器的精度主要由线性误差、偏置误差和分辨率的大小决定的。
4.平均值滤波是对信号y进行m次采样:
滤波器的输出y(k)=。
5.零阶保持器的传递函数为:
6.某温度控制为0℃~500℃系统中,先将温度变换成电信号后进行A/D转换,并保证分辨率为2℃,至少应选用8位A/D转换器。
当温度为100℃时A/D转换的值(十六进制数)是32H。
15、问答题(每题10分,共40分)
1.说明固态继电器(SSR)中光电耦合器、零交叉电路的作用?
在下面的电路图中,若使交流回路接通,I/O接口电路应输出高电平还是低电平?
答:
①光电耦合器的作用:
对输入输出进行隔离。
②零交叉电路的作用:
可使交流电压变化到0V附近时让电路接通,从而减少干扰。
③I/O接口电路应输出高电平时,使交流回路接通。
2.计算机控制系统中一般有哪几种接地线?
请画出串联一点法接地和并联一点法接地示意图。
答:
接地线有:
模拟地、数字地、安全地、系统地、交流地。
3.试比较增量型PID控制器调节和位置型PID的调节效果及二者的区别?
答:
增量式只输出控制增量,即执行机构位置的变化部分,因而误动作影响小,用于执行器具有积分作用的场合,在i时刻的输出ui,只需用到此时刻的偏差,以及前一时刻,前两时刻的偏差ei-1,ei-2和前一次的输出值ui-1,这大大节约了内存和计算时间;位置方式的控制输出对应执行器的位置,而且其输出与前面所有时刻的偏差有关,容易产生累计误差和误动作。
4.简述应如何选择计算机控制系统中采样周期?
答:
(1)首先确定采样周期的上下限:
上限根据采样定理来确定;下限根据计算机执行程序和输入输出所耗费的时间来确定。
(2)其次要考虑的因素有:
①给定值的变化率;②被控对象的特性;③执行机构的类型;④控制算法的类型;⑤控制回路数。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 计算机控制 技术 作业题
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 12处方点评管理规范实施细则_精品文档.doc
12处方点评管理规范实施细则_精品文档.doc
-
12核心制度竞赛题库_精品文档.doc
-
12新医疗技术准入制度_精品文档.docx
-
12月份医务科质控通报_精品文档.doc
-
12项基本公共卫生服务项目_精品文档.docx
-
12月环境卫生学监测方法考核试题_精品文档.doc
-
13双重预防体系风险评价制度及准则_精品文档.doc
-
12种不能忽视的可能的心脏病症状_精品文档.doc
-
13检验科“三基”考试试卷_精品文档.doc
-
14以预防为先导_精品文档.doc
-
12高危药品分级管理制度及目录_精品文档.doc
-
13个病种中医护理方案_精品文档.docx
-
16检验科应对突发事件应急预案_精品文档.docx
-
12急救药品管理制度_精品文档.doc
 17种抗癌药纳入国家基本医疗保险工伤保险和生育保险药品目录_精品文档.xls
17种抗癌药纳入国家基本医疗保险工伤保险和生育保险药品目录_精品文档.xls
-
14医疗器械召回程序_精品文档.wps
-
13医用耗材库房管理制度_精品文档.doc
-
136个幼儿园英语课堂游戏_精品文档.docx
-
12经络彩图_精品文档.doc
-
151颅脑损伤恢复期康复临床路径_精品文档.doc
-
14项护理核心制度_精品文档.doc
-
12检验科化学危险物品使用准则_精品文档.doc
-
15-消化内镜手术分级目录_精品文档.xls
-
13术前讨论记录本模板_精品文档.doc
-
17-下腰痛评估表JOAVAPS_精品文档.doc
-
12项基本公共卫生服务流程图_精品文档.doc
-
13中国髋膝关节置换的现状及展望_精品文档.docx
-
14种最迷惑人的癌症前兆_精品文档.docx
-
17消毒供应室医院感染管理制度_精品文档.doc
-
15附加住院津贴保险条款的费率-人保财险备-健康附号_精品文档.doc
-
19陕西省崔家沟监狱罪犯医疗防疫总站突发事件预案_精品文档.doc
-
20项护理技术操作规程及评分标准_精品文档.doc
-
彼得与狼说课稿.docx
-
安4技术交底.docx
-
安徽中考语文专题复习练习第6讲 记叙文阅读含散文小说含答案.docx
-
表达式求值报告.docx
-
玻化微珠施工技术要求DOC.docx
-
奥鹏福师《小学生心理健康教育》在线作业一5doc.docx
-
部编版三年级上册《大青树下的小学》教学设计与反思精选.docx
-
八年级语文下册25孟子两章《得道多助失道寡助》教案鲁教版五四制.docx
-
部编人教版七年级历史上册同步练习第12课 汉武帝巩固大一统王朝.docx
-
班长个人工作总结.docx
-
版《创新设计》高考地理总复习浙江专用必考自然地理模块卷.docx
-
半导体打一字.docx
-
彩云杯中华优秀传统文化知识竞赛试题库分析范文.docx
-
北京爱情故事知道.docx
-
北京市石景山区学年第一学期期末考试九年级物理试题.docx
-
常用免疫抑制剂方案.docx
-
朝阳区中考二模英语试题及答案.docx
-
晨跑的搞笑心情说说.docx
-
备战高考英语各地模拟题分类专题训练阅读理解篇.docx
