 第四章机械传动部件的计算与选型.docx
第四章机械传动部件的计算与选型.docx
- 文档编号:6060758
- 上传时间:2023-01-03
- 格式:DOCX
- 页数:10
- 大小:79.58KB
第四章机械传动部件的计算与选型.docx
《第四章机械传动部件的计算与选型.docx》由会员分享,可在线阅读,更多相关《第四章机械传动部件的计算与选型.docx(10页珍藏版)》请在冰豆网上搜索。
第四章机械传动部件的计算与选型
第四章机械传动部件的计算与选型
一、机械传动部件的计算与选型
1.导轨上移动部件的重量估算按照下导轨上面移动部件的重量来进行估算。
包括工件、夹具、工作平台、上层电动机、减速箱、滚动丝杠副、直线滚动导轨副、导轨座等,估计重量约为800N.
2.铣削力的计算设零件的加工方式为立式铣削,采用硬质合金立铣刀,工件的材料为
碳钢。
则由硬质合金铣刀铣削力计算公式表查得立铣时的铣削力计算公式为:
1)
0.850.750.731.00.1Fc118aefzdapnZ
今选择铣刀的直径d=15mm,齿数Z=3,为了计算最大铣削力,在不对称铣削的情况下,取最大铣削宽度ae15mm,背吃刀量ap8mm,每齿进给量fz0.1mm,铣刀转速n=300r/min。
则由式
(1)求得最大铣削
力:
Fc118150.850.10.75150.7381.03000.13N1232.92N1233N
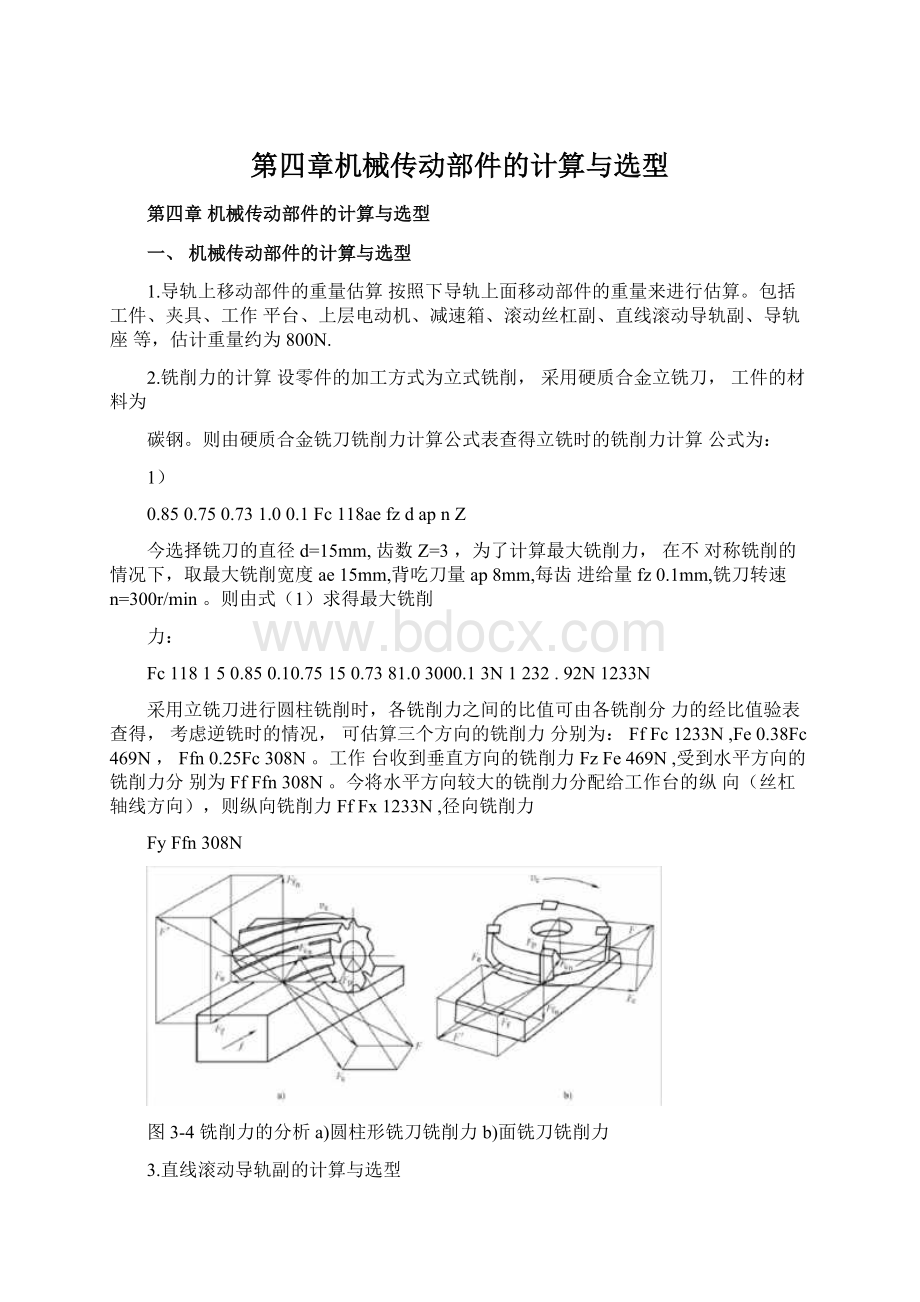
采用立铣刀进行圆柱铣削时,各铣削力之间的比值可由各铣削分力的经比值验表查得,考虑逆铣时的情况,可估算三个方向的铣削力分别为:
FfFc1233N,Fe0.38Fc469N,Ffn0.25Fc308N。
工作台收到垂直方向的铣削力FzFe469N,受到水平方向的铣削力分别为FfFfn308N。
今将水平方向较大的铣削力分配给工作台的纵向(丝杠轴线方向),则纵向铣削力FfFx1233N,径向铣削力
FyFfn308N
图3-4铣削力的分析a)圆柱形铣刀铣削力b)面铣刀铣削力
3.直线滚动导轨副的计算与选型
(1)滑块承受工作载荷Fmax的计算及导轨型号选取工作载荷
是影响直线滚动导轨副使用寿命的重要因素。
本例中的X-Y工作台为水平布置,采用双导轨、四滑块的支撑形式。
考虑最不利的情况,即垂直于台面的工作载荷全部由一个滑块承担,则单滑块所承受的最大垂直方向载荷为:
FmaxGF
(2)
4
其中,移动部件重量G=800N,外加载荷FFz469N,代入式
(2),
得最大工作载荷Fmax669N0.669KN.
查表得,根据工作载荷Fmax0.669KN,初选直线滚动导轨副的型号为KL系列的JSA-LG15型,其额定动载荷Ca=7.94KN,额定静载荷Coa=9.5KN.
任务书规定工作台留有一定余量,查表得,按标准系列,选取导轨长
度为520mm.
(2)距离额定寿命L的计算上述选取的KL系列JSA-LG15导轨副的滚道硬度为60HRC,工作温度不超过1000C,每根导轨上配有两只滑块,精度为4级,工作速度较低,载荷不大。
查表5-表9,分别取硬度系数fH=1.0、温度系数fT=1.00、接触系数fc=0.81、精度系数fR=0.9、载荷系数fw=1.5,代入式
fHfTfcfRCa
50
FC
110.810.97.94
1.5
远大于期望值50km,故距离额定寿命满足要求。
4.滚珠丝杠螺母副的计算与选型
(1)最大工作载荷Fm的计算承受最大铣削力时,工作台受到进给方向的载荷(与丝杠轴线平行)Fx1233N,受到横向的载荷(与丝杠轴线垂直)Fy308N,受到垂向的载荷(与工作台面垂直)
Fz469N。
已知移动部件总重量G=800N,按矩形导轨进行计算,查表,取颠覆力矩影响系数K=1.1,滚动导轨上的摩擦因数肓0.005。
求得滚珠丝杠副的最大工作载荷:
FmKFxFzFyG1.112330.005469308800N1364
(2)最大动载荷Fq的计算
设工作台在承受最大铣削力时的最快进给速度v=400mm/min,初选丝杠导程Ph=5mm,则此时丝杠转速nVPh80rmin。
取滚珠丝杠的使用寿命T=15000h,代入Lo60nT106,得丝杠寿命系数Lo=72(单位为:
106r)。
查表11,取载荷系数fw=1.2,滚道硬度为HRC60时,取硬度系数fH=1.0,代入式,求得最大动载荷:
FqLofwfHFm6809N
(3)初选型号根据计算出的最大动载荷和初选的丝杠导
程,查表,选择南京滚珠丝杠轴承厂生产的FFZD系列的2004-3型
滚珠丝杠副,为内循环固定反向器单螺母式,其公称直为20mm,
导程为4mm,循环滚珠为3圈X1列,精度等级取5级,额定动载荷为7.3kN,大于Fq,满足要求。
(4)传动效率n的计算将公称直径do=20mm,导程为4mm,
代入arctan旦,得丝杠螺旋升角?
=3.64。
。
将摩擦角#10',代
d°
入喻/^100%tan3.64/^an364010'100%97.3%,得传动效
率n=97.3%。
(5)刚度的验算
1)X-Y工作台上下两层滚珠丝杠副的支承均采用“单推-单推”
的方式,见书后图6-23。
丝杠的两端各采用一对推力角接触球轴承,面对面组配,左、右支承的中心距离约为a=500mm;钢的弹性模
量E=2.1X105Mpa;查表13,得滚珠直径Dw=3mm,丝杠底径d2=16.9mm,丝杠截面积Sd243.1416.92/4224.318mm2。
算得丝杠在工作载荷Fm作用下产生的拉/压变形量
1
13645002.1105224.318亦
0.0145mm
根据公式
Zd°Dw33・14203318,求得单圈滚珠数Z=18;该型号丝杠
为单螺母,滚珠的圈数x列数为3X1,代入公式:
Z=Zx圈数x列数,得滚珠总数量Z刀=54。
丝杠预紧时,取轴向预紧力Fyj=
Fm/4=341N。
则由(3-27)式,求得滚珠与螺纹滚道间的接触变形量82~0.0036mm。
因为丝杠加有预紧力,且为轴向负载的1/3,所以实际变形量可减小一半,取8=0.0018mm。
3)将以上算出的8和82代入8总=8+82,求得丝杠总变形量(对应跨度500mm)8总=0.0181mm=18.1^m。
由表14知,5级精度滚珠丝杠有效行程在315~400mm时,行程偏差允许达到25呵,可见丝杆刚度足够。
(6)压杆稳定性校核(Fk=fk兀2EI/(Kls2))
根据公式(3-28)计算失稳时的临界载荷Fk。
查表15,取支承系数fk=1;由丝杠底径d2=16.9mm,求得截面惯性矩I=nd24/64〜4004.21mm;压杆稳定安全系数K取3(丝杠卧式水平安装);
滚动螺母至轴向固定处的距离a取最大值500mm。
代入式(3-28),得临界载荷Fk〜9343N,远大于工作载荷Fm=1364N,故丝杠不会失稳。
综上所述,初选的滚珠丝杠副满足使用要求。
5.步进电动机减速箱的选用
为了满足脉冲当量的设计要求,增大步进电动机的输出转矩,同时也为了使滚珠丝杠和工作台的转动惯量折算到电动机转轴上尽可能地小,今在步进电动机的输出轴上安装一套齿轮减速箱。
采用一级减速,步进电动机的输出轴与小齿轮联接,滚珠丝杠的轴头与大齿轮联接。
其中大齿轮设计成双片结构,采用图3-8所示的弹簧错齿法消除侧隙。
图3-8双片薄齿轮错齿调整机构
1、2、6—齿轮3—螺母4、5—螺钉7—拉簧
已知工作台的脉冲当量
3=0.005mm/脉冲,滚珠丝杠的导程
Ph=4mm,初选步进电动机的步距角a=0.75°。
根据aPh360,算
本设计选用常州市新月电机有限公司生产的JBF-3型齿轮减速
箱。
大小齿轮模数均为1mm,齿数比为75:
45,材料为45号调质钢,齿表面淬硬后达HRC55。
减速箱中心距为[(75+45)X1/2]mm=60mm,小齿轮厚度为20mm,双片大齿轮厚度均为10mm.
6.步进电动机的计算与选型
(1)计算加在步进电动机转轴上的总转动惯量喝已知:
滚珠丝杠的公称直径do=2Omm,总长l=500mm,导程Ph=4mm,材料密度p=7.85X10"3kg/cm3;移动部件总重量G=800N;小齿轮宽度b1=20mm,直径d1=45mm;大齿轮宽度b2=20mm,直径b2=75mm;传动比i=5/3。
参照表4-1,算得各个零部件的转动惯量如下(具体计算过程从略):
滚珠丝杠的转动惯量Js=0.617kg•m2拖板折算到丝杠上的转动惯量Jw=0.517kgcm2;小齿轮的转动惯量Jz1=0.259kgcm大齿轮的转动惯量Jz2=4.877kgcm2。
初选步进电动机型号为90BYG2602,为永磁感应式电动机,由
常州宝马集团公司生产,二相四拍驱动时步距角为0.75O,从表4-5
查得该型号电动机转子的转动惯量Jm=4kgcm2。
则加在步进电动
机转轴上的总转动惯量为:
JeqJmJz1Jz2JwJs.240.2594.8770.5170.61730.35kg2
eqi2.cm2
2)计算加在步进电动机转轴上的等效负载转矩Teq分快速空载
起动和承受最大工作负载两种情况进行计算
1)快速空载起动时电动机转轴所承受的负载转矩Teql由式(4-8)
可知,Teql包括三部分:
一部分是快速空载起动时折算到电动机转轴上的最大加速转矩Tamax;一部分是移动部件运动时折算到电动机转轴上的摩擦转矩Tf;还有一部分是滚珠丝杠预紧后折算到电动机转轴上的附加摩擦转矩To。
因为滚珠丝杠副传动效率很高,根据(4-12)式可知,To相对于Tamax和Tf很小,可以忽略不计。
则有:
Teql=Tamax+Tf
根据式(4-9),考虑传动链的总效率n计算快速空载起动时折
算到电动机转轴上的最大加速转矩:
(6-14)
2Jeqnm1
Tamax
60ta
式中nm——对应空载最快移动速度的步进电动机最高转速,
单位为r/min;
ta步进电动机由静止到加速至nm转速所需的时间,单
式中nmax空载最快移动速度,任务书指定为
3000mm/min
步进电动机步距角,预选电动机为0.75o;
5——脉冲当量,本例5=0.005mm/脉冲
将以上各值代入式(6-15),算得nm=1250r/min
设步进电动机由静止到加速至nm转速所需时间ta=0.4s,传动
4
十230.35101250
600.40.7
Tamax
链总效率n=0.7。
则由式(6-14)求得:
1.42(Nm)
由式(4-10)可知,移动部件运动时,折算到电动机转轴上的
则由式(6-16),得:
Tf0.0025(0.7802)5/120050.002(Nm)
Tf
最后由式(6-13),求得快速空载起动时电动机转轴所承受的负
载转矩:
Teq1=Tamax+Tf=1.422N(6-17)
2)最大工作负载状态下电动机转轴所承受的负载转矩Teq2由式
(4-13)可知,Teq2包括三部分:
一部分是折算到电动机转轴上
的最大工作负载转矩Tt;一部分是移动部件运动时折算到电动机转轴上的摩擦转矩Tf;还有一部分是滚珠丝杠预紧后折算到电动机转轴上的附加摩擦转矩T0,T0相对于Tt和Tf很小,可以忽略不计。
则有:
Teq2=Tt+Tf
(6-18)
其中,折算到电动机转轴上的最大工作负载转矩Tt由(4-14)式
计算。
本例中在对滚珠丝杠进行计算的时候,已知沿着丝杠轴线方向
的最大进给载荷Fx=1609N,则有:
Fz=556N)情
再由式(4-10)计算垂直方向承受最大工作负载(况下,移动部件运动时折算到电动机转轴上的摩擦转矩:
0.005(556800)0.005
0.004N.m
20.725/12
最后由式(6-18),求得最大工作负载状态下电动机转轴所承受
的负载转矩为:
Teq2TtTf0.880.004N.m0.884N.m
(6-19)
经过上述计算后,得到加在步进电动机转轴上的最大等效负载
转矩应为:
TeqmaxTeq1,Teq21.422,0.8841.422N.m
(3)步进电动机最大静转矩的选定考虑到步进电动机的驱动
电源受电网电压影响较大,当输入电压降低时,其输出转矩会下降,可能造成丢步,甚至堵转。
因此,根据来选择步进电动机的最大静
转矩时,需要考虑安全系数。
本例中取安全系数K=4,则步进电动
机的最大静转矩应满足:
Tjmax4Teq41.422N.m5.688N.m(6-20)
上述初选的步进电动机型号为90BYG2602,由表4-5查得该型号电动机的最大静转矩Tjmax=6Nm。
可见,满足(6-20)式的要求。
(4)步进电动机的性能校核
1)最快工进速度时电动机输出转矩校核任务书给定工作台最
快工进速度vmaxf=400mm/min,脉冲当量5=0.005mm/脉冲由
(4-16)式求出电动机对应的运行频率
fmaxf=[400/(60X0.005)]Hz〜1333Hz
从90BYG2602电动机的运行矩频特性曲线图6-24可以看出,在此频率下,电动机的输出转矩Tmaxf〜5.6Nm,远远大于最大工作负载转矩Tmaxf=0.884Nm,满足要求。
2)最快空载移动时电动机输出转矩校核任务书给定工作台
最快空载移动速度vmax=3000mm/min,仿照(4-16)式求出电动
机对应的运行频率fmax二[3000/(60X0.005)]Hz=10000Hz。
从图6-24查得,在此频率下,电动机的输出转矩Tmax=1.8Nm,大
于快速空载起动时的负载转矩Teq1=1.422Nm,满足要求。
3)最快空载移动时电动机运行频率校核最快空载移动速vmax
=3000mm/min对应的电动机运行频率fmax=10000Hz。
查表4-5可知90BYG2602电动机的极限运行频率为20000Hz,可见没有超出上限。
4)起动频率的计算已知电动机转轴上的总转动惯量
Jeq=30.35kgcm2电动机转子的转动惯量Jm=4kgcm2,电动机转轴不带任何负载时的最高起动频率fq=1800Hz.
则由式(4-17)可以求出步进电动机克服惯性负载的起动频率:
上式说明,要想保证步进电动机起动时不失步,任何时候的起动频率都必须小于614Hz。
实际上,在采用软件升降频时,起动频率选得更低,通常只有100Hz(即100脉冲/s)。
综上所述,本例中工作台的进给传动选用90BYG2602步进电动机,完全满足设计要求
图6-2490BYG2602步进电动机的运行矩频特性曲线
7.增量式旋转编码器的选用
本设计所选步进电动机采用半闭环控制,可在电动机的尾部转
轴上安装增量式旋转编码器,用以检测电动机的转角与转速。
增量式旋转编码器的分辨率应与步进电动机的步距角相匹配。
由步进电动机
的步距角a=0.75o,可知电动机转动一转时,需要控制系统发出360/a=480个步进脉冲。
考虑到增量式旋转编码器输出的A、B相信号,
可以送到四倍频电路进行电子四细分(见第四章第五节相关内容),
因此,编码器的分辨率可选120线。
这样控制系统每发一个步进脉冲,电动机转过一个步距角,编码器对应输出一个脉冲信号。
本例选择编码器的型号为:
A-ZKT-D100B:
盘状空心型,孔径
20mm,与电动机尾部出轴相匹配,电源电压+5V,每转输出120个A/B脉冲,信号为电压输出,生产厂家为长春光机数显技术有限公司。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 第四 机械传动 部件 计算 选型
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 铝散热器项目年度预算报告.docx
铝散热器项目年度预算报告.docx
-
牛津上海版通用小学英语三年级上册Unit 12同步练习2II 卷.docx
-
论我国私营企业员工激励机制.docx
-
人教版五年级品德与社会上册全册教案.docx
-
开学啦国旗下讲话稿三分钟.docx
-
露天采矿学复习题.docx
-
六年级英语教师年度考核个人总结.docx
-
某路站综合体项PC吊装施工方案.docx
-
人教版九年级历史上册期末考试试题一套.docx
-
隆昌妇幼保健院.docx
-
芦二矿抽采达标中长期规划.docx
-
看拼音写词语.docx
-
模拟磁盘调度算法系统的设计毕业设计.docx
-
每周一条名言警句或一首诗词.docx
-
棉花膜下滴灌示范工程设计总结报告.docx
-
九年级化学教案第十单元酸和碱教案新人教版.docx
-
宁波市水资源公报.docx
-
农业实用技术培训工作意见与农业局上半年工作总结范例两篇汇编.docx
-
平行线的判定.docx
-
内部会计管理制度11成本核算制度.docx
-
盘扣式脚手架支撑方案.docx
-
旅游规划模板.docx
-
煤矿大本大专毕业设计大采高综采工作面作业规程.docx
-
美学选择题整理课件资料.docx
-
名家论腹泻慢性肠炎.docx
-
宁夏银川市第一中学学年高一上学期期中考试地理试题解析解析版.docx
-
年产吨精密纤维纸项目建设建议书.docx
-
农技推广中心工作总结.docx
-
彭宇案的法逻辑批判.docx
-
宁夏仕奇房产网发布份房地产交易情况.docx
-
项目推荐书智能温控节能系统.docx
-
区县节日期间加强消防安全讲话稿与区发改委领导班子述职述廉报告汇编.docx
-
低压电缆敷设方案最新版Word文件下载.docx
-
电梯维保年度个人工作总结报告Word下载.docx
-
阿里斯顿AL D洗衣机说明书文档格式.docx
-
小学一年级下册100内口算题每日100题文档格式.docx
-
小区的室外管网及管线综合设计指引Word文档下载推荐.docx
-
孵化器专业化服务体系打造Word格式文档下载.docx
-
党旗下的誓言演讲稿Word文档格式.docx
-
物联网基础Word文档格式.docx
-
高考地理总复习 仿真模拟卷 一Word文档下载推荐.docx
-
学校学年工作总结范文10篇Word文件下载.docx
-
关于适合销售团队的队名Word文件下载.docx
-
新闻发布系统Word格式.docx
-
高一英语试题及答案Word文档下载推荐.docx
-
跟一个男生表白的句子文档格式.docx
-
国际足联转会制度发展与未成年球员的权益保障研究文档格式.docx
-
国务院产品质量和食品安全领导小组办公室文件文档格式.docx
-
春季运动会经典开幕词8篇大全文档格式.docx
-
脊髓灰质炎查漏补种实施方案Word格式.docx
-
城市道路交通规划及路线设计规范Word文档下载推荐.docx
