 机器人学蔡自兴课后习题答案.docx
机器人学蔡自兴课后习题答案.docx
- 文档编号:5548806
- 上传时间:2022-12-19
- 格式:DOCX
- 页数:15
- 大小:207.31KB
机器人学蔡自兴课后习题答案.docx
《机器人学蔡自兴课后习题答案.docx》由会员分享,可在线阅读,更多相关《机器人学蔡自兴课后习题答案.docx(15页珍藏版)》请在冰豆网上搜索。
机器人学蔡自兴课后习题答案
其余的比较简单,大家可以自己考虑。
3.坐标系{B}的位置变化如下:
初始时,坐标系{A}与{B}重合,让坐标系{B}绕ZB轴旋转二角;然后再绕XB旋转••角。
给出把对矢量BP的描述变为对AP描述的旋转矩阵。
解:
;坐标系{B}相对自身坐标系(动系)的当前坐标系旋转两次,为相对变换,齐次变换顺序为依次右乘。
.对AP描述有AP=BTBP;
其中AT=ROt(z,RROt(X,)。
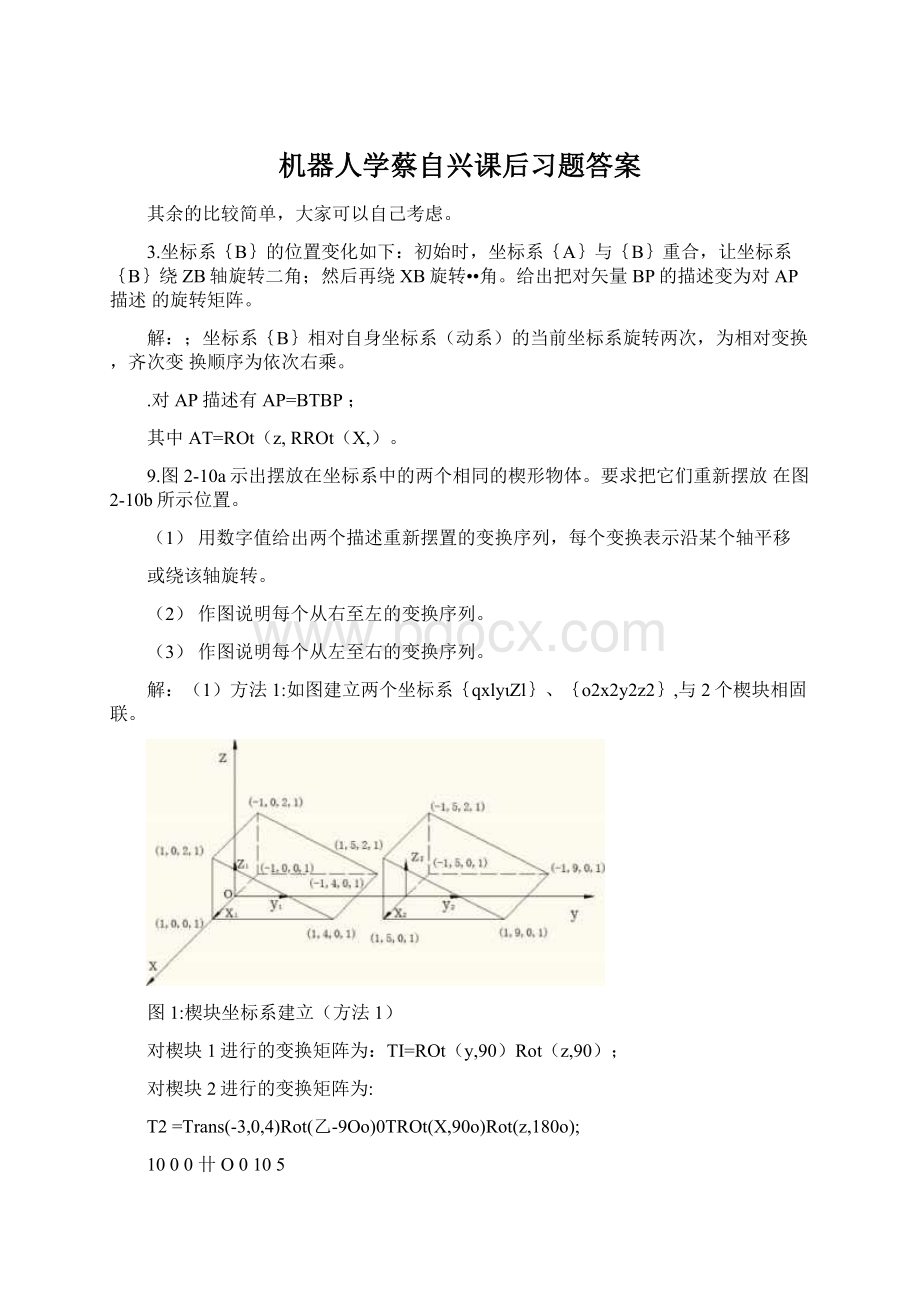
9.图2-10a示出摆放在坐标系中的两个相同的楔形物体。
要求把它们重新摆放在图2-10b所示位置。
(1)用数字值给出两个描述重新摆置的变换序列,每个变换表示沿某个轴平移
或绕该轴旋转。
(2)作图说明每个从右至左的变换序列。
(3)作图说明每个从左至右的变换序列。
解:
(1)方法1:
如图建立两个坐标系{qxlyιZl}、{o2x2y2z2},与2个楔块相固联。
图1:
楔块坐标系建立(方法1)
对楔块1进行的变换矩阵为:
TI=ROt(y,90)Rot(z,90);
对楔块2进行的变换矩阵为:
T2=Trans(-3,0,4)Rot(乙-9Oo)0TROt(X,90o)Rot(z,180o);
1000卄O0105
其中0T=
0010
J0001_
0
0
-1
2〕
1
0
0
0
;T2=_
∣0
-1
0
4
0
0
1
010
所以:
T1
000
100001_对楔块2的变换步骤:
1绕自身坐标系X轴旋转90;
2绕新形成的坐标系的Z轴旋转180;
3绕定系的Z轴旋转-90;
4
沿定系的各轴平移(-3,0,4)。
对楔块1进行的变换矩阵为:
T1=Rot(y,90)Rot(z,90);
对楔块2进行的变换矩阵为:
T2=Trans(-2,0,9)Trans(4,0,0)Rot(y,90o)Rot(x,180°)Rot(z,-90°);
■0
0
1
01
■0
0
-1
21
…1
0
0
0
1
0
0
0
所以:
T1=
;T2Z
0
1
0
0
"0
-1
0
9
0
0
1
I0
0
0
1
备注:
当建立的相对坐标系位置不同时,到达理想位置的变换矩阵不同。
(2)、(3)略。
2.图3-11给出一个3自由度机械手的机构。
轴1和轴2垂直。
试求其运动方程式。
解:
方法1建模:
如图3建立各连杆的坐标系。
图3:
机械手的坐标系建立
根据所建坐标系得到机械手的连杆参数,见表1。
表1:
机械手的连杆参数
连杆
Ot
i
di
β
i
1
90o
L1
0
θ1
2
0
L2
0
日2
3
0
0
0
日3
该3自由度机械手的变换矩阵:
0T3=AIAA3;
-
C^1
0Sd
LIC&1
72
-S日2
0
L2C日2"1
S⅛1
0-CBI
L11
S^2
c∈∣2
0
L2S∈∣2
A—
;A=
0
10
0
0
0
1
0
0
00
1_
0
0
1一
Cθ3
-s∈>30
01
S日3
C日30
0
A=
-〉
0
01
0
00
1一
-
CqC82c83-c81s82s83
-c81c82s83-c81s82c83
0T3=
SqC日2cT3-sT1sT2s日3
-s01c02s03-s01sB2cB3
-C日
s(⅛C03+ct⅛s(⅛
-sEsg+cEc^
0
-
0
0
0
方法二进行建模:
L1c^1L2C^iCd2
L1sT1+L2sT1C32
L2S日2
1
坐标系的建立如图4所示。
图4:
机械手的坐标系建立
根据所建坐标系得到机械手的连杆参数,见表2
-
Cq
-sd
0
01
Cθ2
-ST2
0
Lj
Sd
cB1
0
0
0
0
-1
0
A—
A—
r^2_
0
0
1
0
S^2
C日2
0
0
0
0
0
1
0
0
0
1一
C03
-S^3
0
L2I
A..
S^3
曲
0
0
AA3_
0
0
1
0
;
0
0
0
1
表2:
机械手的连杆参数
连杆
^iJL
aid.
di
日i
1
0
0
0
日1
2
90o
L1
0
日2
3
0
L2
0
日3
平行。
图中所示关节均处于零位。
各关节转角的正向均由箭头示出。
指定本机
械手各连杆的坐标系,然后求各变换矩阵0T1,1T2和2T3
解:
对于末端执行器而言,因为单独指定了末端执行器的坐标系,则要确定末端执行器与最后一个坐标系之间的变换关系。
方法1建模:
按照方法1进行各连杆的坐标系建立,建立方法见图5。
图5:
机械手的坐标系建立
连杆3的坐标系与末端执行器的坐标系相重合。
机械手的D-H参数值见表3
表3:
机械手的连杆参数
连杆
8
a
di
θi
1
90o
O
Li+L2
θi
2
O
L3
O
θ2
3
O
L4
O
θ3
末端执行器
O
O
O
日4
注:
关节变量O
将表3中的参数带入得到各变换矩阵分别为:
O
O
O
1
"1
O
O
L3
O
_1
O
1
O
1
O
O
;1T2
—
1
O
Li
+L
2
O
O
1
O
O
O
1
-
O
O
O
1
■i
O
O
L4〕
-
1
O
O
Ol
O
1
O
O
3
O
1
O
O
T末
=
O
O
1
O
O
O
1
O
O
O
O
1一
-
P
O
O
1一
j
0
0
O
2T3二
方法2建模:
按照方法2进行各连杆的坐标系建立,建立方法见图6
图6:
机械手的坐标系建立
3自由度机械手的D-H参数值见表4。
表4:
机械手的连杆参数
连杆
αiΛ
a∖Λ
di
θi
1
0
O
L1+L2
θι
2
90o
O
O
θ2
3
O
L3
O
θ3
末端执行器
O
L4
O
日4
注:
关节变量弓-J4=O。
将表4中的参数带入得到各变换矩阵分别为:
-
1
O
O
O1
[
•1
O
O
Ol
O
1
O
O
O
O
_1
O
T;=
;I=
O
O
1
Ll壮2
O
1
O
O
O
O
O
1一
I
P
O
O
1一
■1
0
0
L3〕
j
0
0
L4I
0
1
0
0
;3T末=
0
1
0
0
0
0
1
0
0
0
1
0
0
0
1_
I(
0
0
0
1一
2T3=
平移分量分别为沿X轴移动0.5,沿Y轴移动0,沿Z轴移动1;微分旋转分量分别为
0.1,0.2和0。
(1)求相应的微分变换;
(2)求对应于坐标系{C}的等效微分平移与旋转。
解:
(1)对基座标系的微分平移:
d=[0.5,0,1]T
对基座标系的微分旋转:
:
=[0.1,0.2,0]T;
(2)由相对变换C可知n、O、
IX
=n怎=0;eBy=O石=0.1;e6z=a6=0.2
对应于坐标系{C}的等效微分平移:
cd=[0.5;0.5;0];微分旋转:
c=[0;0.1;0.2]。
2.试求图3.11所示的三自由度机械手的雅可比矩阵,所用坐标系位于夹手末端
上,其姿态与第三关节的姿态一样。
解:
设第3个连杆长度为L3
1)使用方法1建模,末端执行器的坐标系与连杆3的坐标系重合,使用微分变换法。
图7:
机械手的坐标系建立
表5:
D-H参数表
连杆
αi
Q
di
θi
1
90o
L1
0
θ1
2
0
L2
0
θ2
3
0
0
0
θ3
「C(^2十83)
-S(^2中巧)
0
L2匹1
23
_S^3
0
01
S®+6)
即2+圳)
0
L2S^2
2十
^3
曲
0
0
JL
;T3=
;T3=E;
0
0
1
0
0
0
1
0
-0
0
0
1一
II
_0
0
0
1一
由上式求得雅可比矩阵:
LS日30
L2c60
Ol
0
0
0
0
1
2)使用方法2建模,使用微分变换法
图8机械手的坐标系建立
表6:
D-H参数表
连杆
aid.
di
θi
1
0
0
0
θι
2
90o
Li
0
θ2
3
0
L2
0
日3
"C(^2+日3)
一S(&2+日3)
0
Li+L2C日2】
-
C&3
-S&3
0
L2〕
0
0
_1
0
2
^3
旳3
0
0
;H=
S(^2+&3)
C但2+日3)
0
L2sB2
0
0
1
0
-0
0
0
1一
II
0
0
0
1一
由上式求得雅可比矩阵:
L2^30
L2C日30
00
00


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 机器人学 课后 习题 答案
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 对中国城市家庭的教育投资行为的理论和实证研究.docx
对中国城市家庭的教育投资行为的理论和实证研究.docx
-
二年级下册数学练习题大全.docx
-
二十年后回故乡的优秀作文.docx
-
软基换填施工方案.docx
-
《黑白装饰画》教案.docx
-
课堂教学改革实施方案5篇.docx
-
返璞归真简约致美解读《给予树》教学设计语文.docx
-
离职证明范本精选多篇.docx
-
《天局》全文.docx
-
我害怕作文集合15篇.docx
-
伏魔战记39详细攻略.docx
-
幼儿园学期计划.docx
-
雅思分类打印版Word格式文档下载.docx
-
年产1万吨竹子纤维加工项目可行性研究报告文档格式.docx
-
电商产业化项目投资经营商业计划书Word文件下载.docx
-
医学多媒体课件的设计与制作Word文档格式.docx
-
中学生中秋节想象作文Word格式.docx
-
等保20之漏洞扫描系统技术方案建议书Word文档格式.docx
-
培训学校个人工作计划模板5篇Word格式.docx
-
北京各区二模试题分类汇编文言文阅读Word文档下载推荐.docx
-
不同职业病危害因素的防护常识Word格式文档下载.docx
-
一年级上册同音形近字练习汇总Word文档格式.docx
-
班级家长会上班主任教师讲话稿Word下载.docx
-
科斯塔环载波恢复Word文件下载.docx
-
浙教义务版六年级语文下册教案 花潮Word文件下载.docx
-
集成电路设计与集成系统专业Word格式文档下载.docx
-
开工第一课专题讲座观后感文档格式.docx
-
东城区学年第一学期高三期末化学试题及答案Word格式文档下载.docx
-
苏教版六年级语文下册第七单元测试题Word格式文档下载.docx
-
学长征精神做红色传人活动方案文档格式.docx
-
读书笔记150字30篇文档格式.docx
-
中级经济法考前必背法条精华版备考资料Word格式.docx
-
妈妈的拿手菜作文15篇Word文件下载.docx
-
联通在信业务开发规范Word下载.docx
-
六型班组建设口号完整版Word下载.docx
-
论万科集团的五力战略分析Word下载.docx
-
旅游法全文及解读Word下载.docx
-
铝合金百叶施工组织方案Word文档格式.docx
-
绿化工程施工技术方案及措施Word文件下载.docx
-
卖鞋子销售总结范文常用版3篇Word文档格式.docx
-
马克吐温小说的艺术风格Word文件下载.docx
-
霉菌生长的条件Word文件下载.docx
-
美丽村庄建设实施方案3篇Word格式文档下载.docx
-
农业技术推广研究员专业技术职务任职资格评审表附件Word文件下载.docx
-
门式起重机安装及拆卸方案Word文档下载推荐.docx
-
破冰游戏50个文档格式.docx
-
排放污染物申报登记表Word下载.docx
-
刑诉法高法解释全文内容是什么Word格式.docx
-
培养幼儿良好行为习惯的儿歌之欧阳生创编文档格式.docx
-
性能测试方案Word文档下载推荐.docx
-
棚户区改造工作进展情况汇报docWord格式文档下载.docx
