 第三章稳性.docx
第三章稳性.docx
- 文档编号:5026577
- 上传时间:2022-12-12
- 格式:DOCX
- 页数:61
- 大小:1.25MB
第三章稳性.docx
《第三章稳性.docx》由会员分享,可在线阅读,更多相关《第三章稳性.docx(61页珍藏版)》请在冰豆网上搜索。
第三章稳性
第三章船舶稳性
第一节稳性的基本概念
一、船舶平衡的3种状态
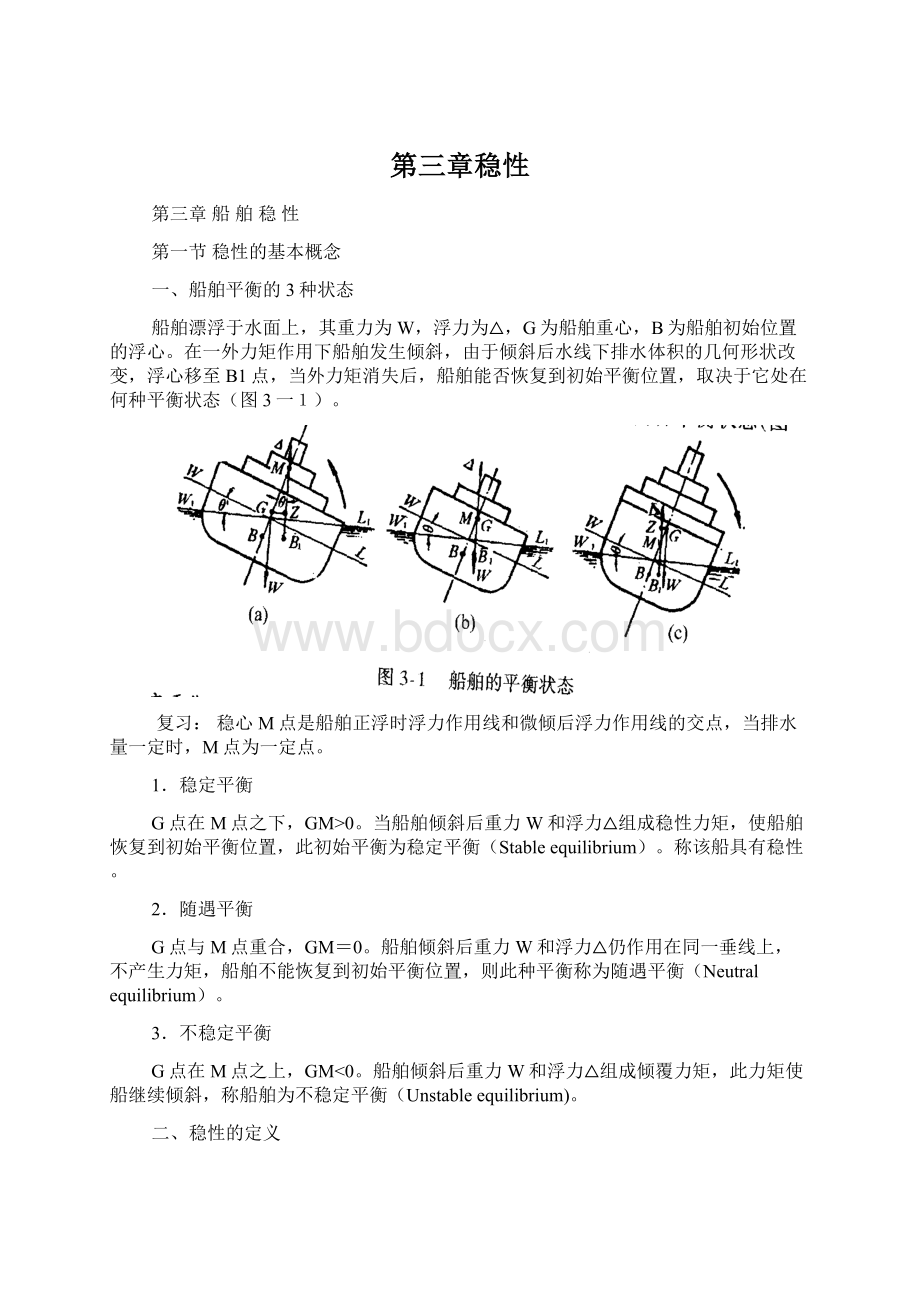
船舶漂浮于水面上,其重力为W,浮力为△,G为船舶重心,B为船舶初始位置的浮心。
在一外力矩作用下船舶发生倾斜,由于倾斜后水线下排水体积的几何形状改变,浮心移至B1点,当外力矩消失后,船舶能否恢复到初始平衡位置,取决于它处在何种平衡状态(图3一1)。
复习:
稳心M点是船舶正浮时浮力作用线和微倾后浮力作用线的交点,当排水量一定时,M点为一定点。
1.稳定平衡
G点在M点之下,GM>0。
当船舶倾斜后重力W和浮力△组成稳性力矩,使船舶恢复到初始平衡位置,此初始平衡为稳定平衡(Stableequilibrium)。
称该船具有稳性。
2.随遇平衡
G点与M点重合,GM=0。
船舶倾斜后重力W和浮力△仍作用在同一垂线上,不产生力矩,船舶不能恢复到初始平衡位置,则此种平衡称为随遇平衡(Neutralequilibrium)。
3.不稳定平衡
G点在M点之上,GM<0。
船舶倾斜后重力W和浮力△组成倾覆力矩,此力矩使船继续倾斜,称船舶为不稳定平衡(Unstableequilibrium)。
二、稳性的定义
船舶在外力矩作用下偏离其初始平衡位置而倾斜,当外力矩消失后能自行恢复到初始平衡状态的能力称为船舶稳性(Stability)。
船舶是否具有稳定平衡的状态,视其倾斜后是否具有稳性力矩(Stabilitymoment;Upsettingmoment)。
而稳性力矩的大小为
MS=△·GZ(3-1)
式中:
MS—静稳性力矩(9.81kN·m);
△—排水量(t);
GZ—静稳性力臂(Staticalstabilitylever)(m),是船舶重心G至倾斜后浮力作用线的垂直距离,一般简称做稳性力臂。
三、稳性的分类
1.按船舶倾斜方向分类
可分为横稳性和纵稳性。
横稳性指船舶绕纵向轴(x轴)横倾时的稳性;纵稳性指船舶绕横向轴(y轴)纵倾时的稳性。
由于纵稳性力矩远大于横稳性力矩,故不可能因纵稳性不足而导致船舶倾覆。
2.按倾角大小分类
可分为初稳性和大倾角稳性。
初稳性指船舶微倾(倾角<100)时所具有的稳性(小倾角稳性),微倾在实际营运中将倾斜角扩大至100一150;大倾角稳性指当倾角大于100一150时的稳性。
3.按作用力矩的性质分类
可分为静稳性和动稳性。
静稳性指船舶在倾斜过程中不计及角加速度和惯性矩的稳性;动稳性指船舶在倾斜过程中计及角加速度和惯性矩的稳性。
4.按船舱是否进水分类
按船舶是否破舱进水将稳性分成完整稳性和破舱稳性。
第二节船舶初稳性
理论证明:
当排水量一定时,船舶在微倾条件下,其倾斜轴始终通过初始水线面的面积中心,即漂心F(即F为定点);船舶的稳心M点也为一定点(M点是船舶正浮时浮力作用线和微倾后浮力作用线的交点)。
船舶初稳性是以上述结论为前提进行研究和表述的。
一、船舶初稳性的基本标志
船舶在小倾角条件下,稳性力矩Ms可表示为
MS=ΔGMsinθ(3-2)
即GZ=GMsinθ(3-3)
由上式可见,在排水量及倾角一定情况下,稳性力矩大小取决于重心和稳心的相对位置,即GM大小。
当M点在G点之上,GM为正值,此时船舶具有稳性力矩并与GM值成正比;当M点在G点之下,GM为负值,此时船舶具有倾覆力矩亦与GM值成正比;当M点和G点重合,GM为零,此时稳性力矩为零。
由此可知,GM是衡量船舶初稳性大小的基本标志。
欲使船舶具有稳性,必须使GM>O。
二、初稳性高度GM的表达式
由图3-2可见,初稳性高度可表示为
GM=KB+BM一KG=KM一KG(3-4)
KM=KB+BM
或h=Zb+r一Zg=Zm一Zg(3一4)’
式中:
Zb—浮心距基线高度(m),简称浮心高度;
r—横稳心半径(m);(BM)
Zm—横稳心距基线高度(m);
Zg—重心距基线高度,简称重心高度(m)。
1.Zb(或KB)
由于船舶的浮力等于其所排开水的重量,假设水在舷外各点的密度不变,故浮力的作用中心B即浮心(Centerofbuoyancy)也就是船舶排水体积的几何中心。
浮心坐标用xb、yb和Zb表示。
浮心的垂向坐标Zb与水线下排水体积的形状有关。
箱形船:
Zb=d/2
等腰三角形柱体船:
Zb=2d/3
一般船体:
d/2 较肥的船: Zb靠近d/2 较尖瘦的船: Zb靠近2d/3。 根据实船统计,Zb=(0.52-0.55)d。 具体船舶在不同吃水时的Zb值可由静水力曲线图根据装载吃水查取相应曲线得到。 2.r(或BM) 稳心半径r是浮心B与稳心M间的垂距。 在微倾条件下,船舶浮心移动的轨迹是以M为圆心、r为半径的一段圆弧。 稳心半径r可由下式求出 r=Ix/V(3-5)(纵r=Iy/v) 式中: V-船舶排水体积(时); Ix—船舶正浮时水线面积对横倾轴的惯性矩(m4)。 Ix值与水线面的形状和大小有关。 对于水线面为矩形的船,Ix=LB3/12≈0·0833LB3; 对于水线面为菱形的船,Ix=LB3/48≈0·0208LB3; 对于一般船体,其水线面介于矩形和菱形之间,故Ix也介于相应两者之间,其统计数值为Ix≈(0.045一0.065)LB3。 船舶在不同吃水时的r值有的在静水力曲线图中给出。 3.Zm(或KM) 由式(3-4),有 KM=KB+BM(3-7) 或Zm=Zb十r(3-7)’ 船舶不同吃水时的Zm(KM)值可在船舶资料中查取。 三、初稳性高度的求取 船舶在装载后初稳性高度可由式(3-4)求取,即 GM=KM一KG 1.KM的查取 根据船舶装载后的吃水查取静水力曲线图、静水力参数表或载重表,即可得到相应d时的KM值。 2.KG的计算 根据合力矩定理,KG可按下式求得 KG=∑PiZi/9.81Δ 式中: Pi—构成排水量的各项载荷重量(t),包括空船重量ΔL、船舶常数c、各货舱货物重量、各液舱油水重量、船员及其供应品、船用备品等; Zi一载荷Pi的重心高度(m) ∑PiZi—全船垂向重量力矩(kN·m) 1)空船重量及其重心高度的查取 对于某一船舶,空船重量△L及其重心高度ZL为定值,它们可在船舶资料中查找。 2)货物重心高度的确定 (1)计算法 对于一舱内装载SF差异较大的多种货物时,用计算法确定各层货物的重心高度,有利于减小GM值的计算误差。 各层货物的重心高度可按下式求出 Zi=hci/2+hb(3-9) 式中: hci—货层高度(m) hci=(Vci/Vch)·Hc(舱高比) 其中: Vci—货层体积(m3); Vch—该舱舱容(m3); Hc—该舱舱高(m); hb—货层底面距基线高(m)。 由于首尾部货舱形状不规则,货物重心可取货层高度的0.54~0.58处。 例3-1: 某船在No.3底舱装载五金1600t(SF=0.5m3/t)、棉织品100t(SF=4.5m3/t)、日用品120t(SF=4.6m3/t)及草制品90t(SF=7.2m3/t),货物在舱内配置如图3-3,试计算各货物重心高度Zi及该舱货物总重心高度Zh。 已知该舱舱容Vch一2710m3,舱高Hc=7.2m,双层底高为1.5m。 解: 1列表计算货物重心高度Zi(表3-1)(hci=Vci/Vch·Hc) ②求货物总重心高度Zh Zh=∑PiZi/∑Pi =(1500x2.70+220x5.22+70x7.22)/(1500+220+70)=3.19m 在实际工作中,为简化计算,无论货舱内装载多少种货物及积载因数是否相差较大,均以舱内所装货物总体积中心作为该舱货物计算中心;如货物基本满舱,则取舱容中心作为该舱货物计算中心。 由此简化计算所得货物重心高度与实际值显然有一定出入,但其算法简单,且求得的GM值偏小,因而偏于安全。 (2)舱容曲线(或舱容表)查取法 对于某些散货船或杂货船,船舶资料中提供了各货舱舱容曲线或舱容表,使用时直接由货物总体积查出货物装舱后的重心高度。 图3-4为某船某舱的舱容曲线。 ! 图3-4舱容曲线 例3-2: 某船某航次在大连港计划装载如表3-2所列,试求开航时船舶初稳性高度GM值。 解: 1)列表计算△、∑PiZi(表3-2); 2)求KG KG=∑PiZi/9.81Δ=154061/20587=7.48m 3)由△=20587t查得KM=8.67m 4)计算GM GM=KM-KG=8.67-7.48=1.19m 三、自由液面对初稳性高度的影响 船上各液体舱柜,在液体未充满整个舱内空间时,该液体表面称为自由液面(Freesurface)。 当船舶倾斜时,舱柜内的液体随之流动,使液体的重心向倾斜一方移动,产生一横倾力矩,从而减少了原有的稳性力矩,也即降低了初稳性高度。 1.自由液面对初稳性高度修正值表达式 液体重心的移动规律和浮心的移动规律是一样的,横倾后液体的重心由g0移至g1,则和求稳心半径一样,它们与稳心M的距离Lz=ix/v。 如图所示,当船内液体舱柜的液重P的重心位于go点时,船舶稳性力矩为Ms=△GMsinθ 当船舶横倾θ角时,液体流动后重心也随之移至g1点,产生一横移力矩 Mfs=P·gog1=P·Lzsinθ=v·ρ·(ix/v)sinθ Mfs=ρ·ixsinθ(自由液面产生的横倾力矩) 使原有的稳性力矩变为 Ms1=Ms一Mfs Ms1=△GMsinθ-ρ·ixsinθ Ms1=△(GM-ρ·ix/△)sinθ 对比Ms和Ms1可知,由于自由液面影响而使初稳性高度减小,其减小值δGM,可表示为 δGM=ρ·ix/△(m)(3-12) 当存在多个自由液面时,δGM=Σρ·ix/△(3-12)' 2.自由液面惯性矩ix的确定 1)查船舶资料 通常船舶资料中提供了“各液舱自由液面惯性矩ix表”(未满舱)或“各液舱自由液面对初稳性高度修正值表”(满舱),使用时前者直接由未满液舱名称查取,后者则由液舱名及装载排水量△查取。 表3-3为某船δh表。 2)公式计算法 (1)具有折点且液面对称的液舱(柜) 该类液舱(柜)的ix可按下式求算 ①ix=L(b1+b2)(b12+b22)/48(3-13) 式中: L—液面长度(m); b1、b2—液面前、后两端宽度(m)。 ②ix=Lb3/12 ③ix=Lb3/48 ix=Lb3/36 ix=L(b1+b2)(b12+b22)/36 (2)无折点但液面对称的液舱 ix=Лr4/4 ix=Лab3/4 3.自由液面修正后的初稳性高度表达式 若液舱内液体未装满,初稳性高度应进行自由液面修正,经自由液面修正后的初稳性高度 G。 M可表示为 G。 M=KM-KG-δGMf(3-16) 例3-3: 某船装货后△=18500t,全船垂向重量力矩143375x9.81kN·m,现有No.1燃油舱(左)(1=11.Om,b=4.0m)和尾尖舱(l=11.0m,b1=11.50m,b2=3.40m)未满,其中燃油密度δ=0.97g/cm3,尾尖舱为淡水舱,试计算经自由液面修正后的初稳性高度G。 M(根据△查得KM=8.58m)。 解: 1)求KG KG=∑PiZi/9.81Δ=143375/18500=7.75m 2)计算ix和δh No.1燃油舱红ix=Lb3/12=11x43/12=58.7m4 尾尖舱=ix=L(b1+b2)(b12+b22)/48=491.1m4 δGMf=Σρ·ix/△=(0.97·58.7+1.0·491.1)/18500=0.03m 3)计算G。 M G。 M=KM-KG-δGMf=8.58-7.75-0.03=0.80m 4.减小自由液面影响的措施 1)减小液舱宽度 设置一道或两道纵舱壁,使液舱宽度减小。 双层底内,左右水密分隔成两个液舱。 可以证明: 矩形设一道纵舱壁将其宽度二等分,ix将减至原来的1/4; 两道纵舱壁将其宽度三等分,ix则减至原来的1/9。 等腰梯形或等腰三角 设一道纵舱壁,将其前后宽度等分,ix则会减至原来的1/3. 2)液舱应尽可能装满或空舱 对于液体散装货船,各液舱应尽量装满,若舱容有剩余,则可保留若干空舱,以减少具有自由液面的舱柜数。 对于普通货船,各油水舱应逐个装载和使用,这样可保持在航行中船舶未满液舱柜数最少。 3)保持甲板排水孔畅通 减小因上浪而在上甲板形成自由液面的作用时间。 4)注意纵向水密分隔是否有漏水连通现象及是否有不必要的积水。 5)在排水量较小时,更应重视液舱内自由液面对稳性的不利影响。 (1、某箱型船宽24米,平吃水6米,重心与水线重合,则其GM为: A5MB4.32MC3.5MD1.25M 由BM=Ix/V=(ab3/12)/abdmGM=BM-BG求出A 2、某箱型船宽12米,平吃水5米,求KM? A6.4MB13MC9MD4.9M 由BM=Ix/vKM=d/2+BM求出D) 第三节载荷移动、重量增减、货物悬挂对 稳性的影响及计算 一、载荷移动 船舶在营运中,经常遇到船内重物的移动问题,如在航行中舱内货物因船舶横摇剧烈而移动,配载时为调整船舶稳性而将舱内货物垂移等。 1.船内重物水平横移 船内重物水平横移,将使船舶产生横倾角;船在海上航行由于横摇导致重物横移时,同样使船横倾. 如图3-7所示,船舶排水量为△,重心位于G点,浮心位于B点,此时船舶重力和浮力通过G点和B点构成初始平衡力系,平衡于正浮水线WL。 现将船内重物P自q1水平横移至q2处,其水平横距为y。 根据平行力移动原理,船舶重心将随之由G水平横移至G1,此时,船舶产生横倾,浮心由B移至B1达到新的平衡,并有 GG1=Py/△ tanθ=GG1/GM=Py/△GM 或P·y=GG1·△=tanθ·GM·△ 2.船内重物垂移 船内重物垂向移动,将引起船舶重心的垂向改变,从而引起初稳 性高度的变化。 如图3-8所示,设船舶排水量为△,船舶重心位于G点,现将船 内重物P由g1(Z1)垂向移至g2(Z2)处,其垂向移动距离Z为 Z=Z2一Z1 根据平行力移动原理,船舶重心由G1垂移至G点,移动方向与重物垂移方向一致,垂移量GG1为 GG1=PZ/△ 由于重物移动前后船舶排 水量不变,故KM也未发 生改变,因而重物垂移引 起的初稳性高度GM改变 量δGM在数值上等于船舶重心的垂移量GG1,即 δGM=PZ/△ 由上可知,重物上移,重心上移,GM降低; 重物下移,重心下移,GM增大。 GM1=GM士δGM(3-19) 二、重量增减 货物的装卸,油水的补给和消耗,压载水的注入和排放,在海上 遭遇危险而抛货,船舶破舱进水,船体结冰及甲板上浪等均可视为重 量增减。 重量增减后其排水量变化,船舶重心G及稳心M位置也发生 改变,从而引起初稳性高度改变。 重量增减可分成大量增减和少量增减两种情况。 若船舶初始排水量为△,重量增减量为ΣPi,则一般认为当ΣPi>10%△时为大量增减; 当ΣPi<10%△时为少量增减。 1.大量增减 采用原始算法,即垂向总力矩=各垂向分力矩之和。 KG1=(△×KG+ΣPiZi)/(△+ΣPi) 按上式计算时,重量增加Pi取+;重量减少Pi取一。 由△1=(△+ΣPi)查静水力资料得KM1,因此 GM1=KM1-KG1 2.少量增减 如图3-9所示,在船上g处 加载重物P,已知P的重心高度 为KP,则根据力矩平衡原理可得 G0G1·(△+P)=P·G0g 而G0g=Kp-KG 即把增减的重物P当作从原重心G0移至现有位置。 则 δKG=G0G1=P(Kp-KG)/(△+P) 得δGM=-δKG δGM=P(KG-Kp)/(△+P) 当多个载荷增减时,可将上式改写成: δGM=ΣPi(KG-Kpi)/(△+ΣPi) 排水量改变后对KM的影响在排水量较大时可以忽略不计,而在排水量较小时,尽管载荷增减量较少,也会引起KM值的较大变化。 因此,在应用上式计算δGM时,应充分考虑不同装载状态下KM曲线的变化率,以减小计算误差。 当在某些装载状态下KM值随△变化较快,即KM曲线斜率较大时,为提高δGM的计算精度,建议将载荷增减后所引起的KM变化值δKM考虑在内,即 δKM=KM1一KM 式中: KM载荷增减前的初稳心距基线高(m),由△确定; KM1载荷增减后的初稳心距基线高(m),由△1确定。 于是,载荷增减后初稳性高度改变重量为 δGM=δKM+ΣPi(KG-Kpi)/(△+ΣPi) 船舶载荷增减后的初稳性高度GM1为 GM1=GM+δGM(3-24) 三、货物悬挂 如图3-10所示,当船内悬挂货物P其重心位于q1点,悬挂于m点时, Ms=△·GMsinθ 当船舶横倾θ角时,P在其重力作用 下自q1点移到q2点,产生一横倾力 矩,则 Ms1=△·GMsinθ-P·q1q2 q1q2=Lzsinθ 故Ms1=△GMsinθ一PLzsinθ 即Ms1=△(GM一PLz/△)sinθ 所以,当船上存在悬挂货物时,船舶的初稳性高度将会减小,其值为 δGM=PLz/△ 考虑货物悬挂后的初稳性高度为 GM1=GM-PLz/△ 显然悬挂货物对初稳性的影响相当于把货物自重心q1点垂直上移到悬挂点m处,从而使船舶重心自G点上移至G’点,致使初稳性高度减小,可以把它的重心理解为在悬挂点m处,m点称为悬挂重物的虚重心。 (即悬挂货物的重心不随悬索长短而变) 四、船舶倾斜试验 新建船舶或经重大改建的船舶在出厂前应进行倾斜试验,以确定空船状态下的重心高度。 试验由船厂及船方共同进行,试验报告由船厂负责计算与编制,编制后交验船部门审核。 倾斜试验时称出试验重量P,并量出水平横移距离y。 重物水平横移后船舶的横倾角θ可通过量出摆锤的摆距a和悬距b,按下式求出 tanθ=a/b 由P·y=tanθ·GM·△ 可得GM=P·y·b/(△·a) 由△查得试验时的KM值,故 KG=KM-GM 由于试验时仍有少量设备未安装上船,并有少量施工设备及试验重量未拿下船,故空船排水量应为 △L=△+ΣPI一ΣPJ 式中: ΣPi—试验状态船上不足重量; ΣPj—试验状态船上多余重量。 根据不足和多余重量及其重心坐标,可由(3-28)式P76 求得空船重心高度KGL: 在进行倾斜试验时,应注意以下事项: 1)试验现场风力不大于2级,水面平静无流,无来往船只; 2)船舶尽量为正浮空船状态,对船上可移动装置应系固; 3)液体舱保持抽空状态,如需加压载水调整纵倾则应将舱注满,使之无自由液面; 4)船上不足重量或多余重量对于空船排水量大于3000t的船舶,应不大于0.5%△L; 5)试验时缆绳保持不受力;. 6)倾斜角一般应为2~40,但不得小10 7)重物一般分为四组,作9次移动,试验结果予以加权平均。 第四节船舶大倾角静稳性 一、大倾角静稳性基本概念 1.大倾角稳性和初稳性的区别 首先初稳性θ小于10一15度 大倾角稳性θ大于10一15度 其次,船舶在大倾角横倾时两浮力作用线交点不再为定点M。 从图3-12可以看到,倾角增大时两浮力作用线交点偏离M点而交于M2,M3,…上。 实际上在小倾角粉范围内倾斜前后两浮力作用线交点是交在稳心M点附近,因为非常靠近,所以在讨论初稳性时作为定点处理。 虽有一定误差,但误差极小可以忽略不计,从而使初稳性问题得以简化。 再次,船舶大倾角横倾时倾斜轴不再过初始水线面漂心。 船舶倾角较大时,当倾斜水线超出上甲板边缘后,其形状发生突变,若过初始水线面漂心作倾斜水线,则倾斜前后排水体积不相等,这与等体积倾斜条件相矛盾。 最后,由于稳心M不为定点,大倾角稳性不能以GM作为基本标志来衡量。 2.大倾角静稳性的基本标志 船舶在外力矩作用下发生大倾角横倾,当外力矩消失后,船舶重力和浮力仍然形成一力偶,其力矩即为静稳性力矩,表示式同前,即 Ms=△·GZ 船舶在排水量一定的条件下,稳性力矩Ms大小取决于重心G到倾斜后浮力作用线的垂直距离,即取决于静稳性力臂GZ,因此,静稳性力臂GZ可作为衡量大倾角静稳性的基本标志。 二.静稳性力臂的求算 不同船舶采用的稳性交叉曲线不同。 目前船舶资料中提供的稳性交叉曲线归纳起来有基点法、假定重心法和稳心点法3种。 1.静稳性力臂表达式 1)基点法 如图3-13所示,选定基点K作为量取力臂的参考点,则静稳性力臂GZ可表示为 GZ=KN一KH(3-29) 式中: KN—形状稳性力臂,其值由▽及θ查稳性交叉曲线得出; KH—重量稳性力臂,KH=KGsinθ。 因此GZ=KN一KGsinθ 2)假定重心法 现选定假定重心点GA作为量取力臂的参考点,如图3-15所示,静稳性力臂可由下式表示GZ=GAZA+GGAsinθ 式中: GAZA形状稳性力臂(m),它为GA点到倾斜后浮力作用线的垂距,其大小仅与船体水线下形状有关,GAZA的查取方法与KN相同。 GAZA曲线如图3-16。 GGAsinθ-重量稳性力臂。 由于GA为定点,因此GZ只与装载重心位置有关。 因此假定重心 高度与实际重心高 度的差值可用下式 确定 GGA=KGA-KG 3)稳心点法 稳心点法选定初稳心点M作为量取力臂的参考点,如图3-17所示,静稳性力臂可由下式确定: GZ=MS+GMsinθ 式中: MS—剩余稳性力臂(m),它为初稳心M点到倾斜后浮力作用线的交点,其大小仅与排水体积形状有关,MS曲线如图3-18所示,它与KN曲线查取方法不同: 补充: 在各横倾角时,自MS曲线为起点向下至GMsinθ曲线为终点量取的垂距,即得其GZ值。 若自MS曲线为起点向上量取,则GZ为负值。 (无下横坐标) GMsinθ-重量稳性力臂(m),船舶在吃水一定时,初稳心M为一定点,故重量稳性力臂仅与船舶重心位置有关。 2.静稳性力臂的计算 在计算各倾角时的静稳性力臂GZ值时,如同GM计算一样,也需进行自由液面修正,即液舱内自由液面使GZ减小。 液舱内的液体随船舶倾角的增大而引起自由液面较大变化,从而引起自由液面力矩的较大变化。 自由液面对GZ的修正可由下述两种方法完成。 1)查取“液舱自由液面倾侧力矩表” 有的船舶资料中提供了不同倾角时液舱自由液面倾侧力矩表,使用时对于具体舱柜可直接由不同倾角查取,则经自由液面


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 第三 章稳性
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 广东省普通高中学业水平考试数学科考试大纲Word文档下载推荐.docx
广东省普通高中学业水平考试数学科考试大纲Word文档下载推荐.docx
-
计算题测试文档格式.docx
-
会计年终总结范文精选10篇Word文件下载.docx
-
基坑支护及降排水方案Word格式文档下载.docx
-
古代诗歌鉴赏一剪梅学案Word文档格式.docx
-
国标舞考级Word文件下载.docx
-
机电工程质量验收规范是什么Word文档下载推荐.docx
-
技术员工作自我评价文档格式.docx
-
交警支队车棚改造工程施工合同文档格式.docx
-
护士变更注册申请审核表与示范文本Word文档下载推荐.docx
-
最新学校新冠肺炎疫情防控应急预案Word文件下载.docx
-
GB50204钢筋规范之欧阳总创编Word格式文档下载.docx
-
《半期整改措施》Word格式.docx
-
诊断 症状学腰背痛关节痛汇总.docx
-
英美文学欣赏The Analysis of Shelleys Ode to the West Wind.docx
-
增值税营改增所得税消费税车购税测试题.docx
-
整理二级建造师管理真题.docx
-
英语三级重点高频词汇导入背单词APP使用.docx
-
浙教版学年九年级数学上册第2章测试题及答案.docx
-
证件照教学设计方案.docx
-
优品课件之《从锁国走向开国的日本》教案.docx
-
整理北京交通大学万用表组装实验报告.docx
-
质量管理计划.docx
-
有机化学鉴别.docx
-
整理照明灯饰灯具行业分类英语词汇.docx
-
濉溪县城市总体规划公示.docx
-
智能化工程质量验收记录表.docx
-
学生会纪检部工作总结.docx
-
幼儿园保教主任发言稿.docx
-
跆拳道协会工作总结.docx
-
中国茶叶店连锁市场竞争分析与竞争战略研究报告.docx
-
学宪法讲宪法主题演讲稿800字精选5篇弘扬宪法精神演讲稿5篇.docx
-
试验检测方案.docx
-
硕士研究生入学考试核心词汇辨析104组.docx
-
苏教版小学三年级语文上册全册教案.docx
-
关于粮食安全问题中粮食仓储场存放仓库项目建设可行性研究报告.docx
-
贵州省毕节市中考语文模拟试题及答案.docx
-
杭州中考英语试题及答案.docx
-
河南三门峡市某校区建设项目可行性研究报告.docx
-
湖南省长沙市中考生物试题word版含答案.docx
-
环境设计专业室内装饰中英文对照外文翻译文献.docx
-
基于Qt的音频管理系统的设计与实现本科毕业设计论文.docx
-
多层住宅楼建筑电气照明系统设计课程设计说明书.docx
-
政府经济学.docx
-
加油歌串词.docx
-
防震减灾安全教案.docx
-
中国房颤专家共识.docx
-
副品牌的营销威.docx
-
建筑专业毕业论文.docx
-
中考山东省日照市中考英语试题精品解析答案.docx
-
高二英语下册阶段质量检测试题.docx
