 力扬plc操作手册分卷四910章加附录.docx
力扬plc操作手册分卷四910章加附录.docx
- 文档编号:4964383
- 上传时间:2022-12-12
- 格式:DOCX
- 页数:90
- 大小:34.49KB
力扬plc操作手册分卷四910章加附录.docx
《力扬plc操作手册分卷四910章加附录.docx》由会员分享,可在线阅读,更多相关《力扬plc操作手册分卷四910章加附录.docx(90页珍藏版)》请在冰豆网上搜索。
力扬plc操作手册分卷四910章加附录
第九章万年历模块及记忆卡
¥Ex1RTC1-1/1-2/1-3
性能规格
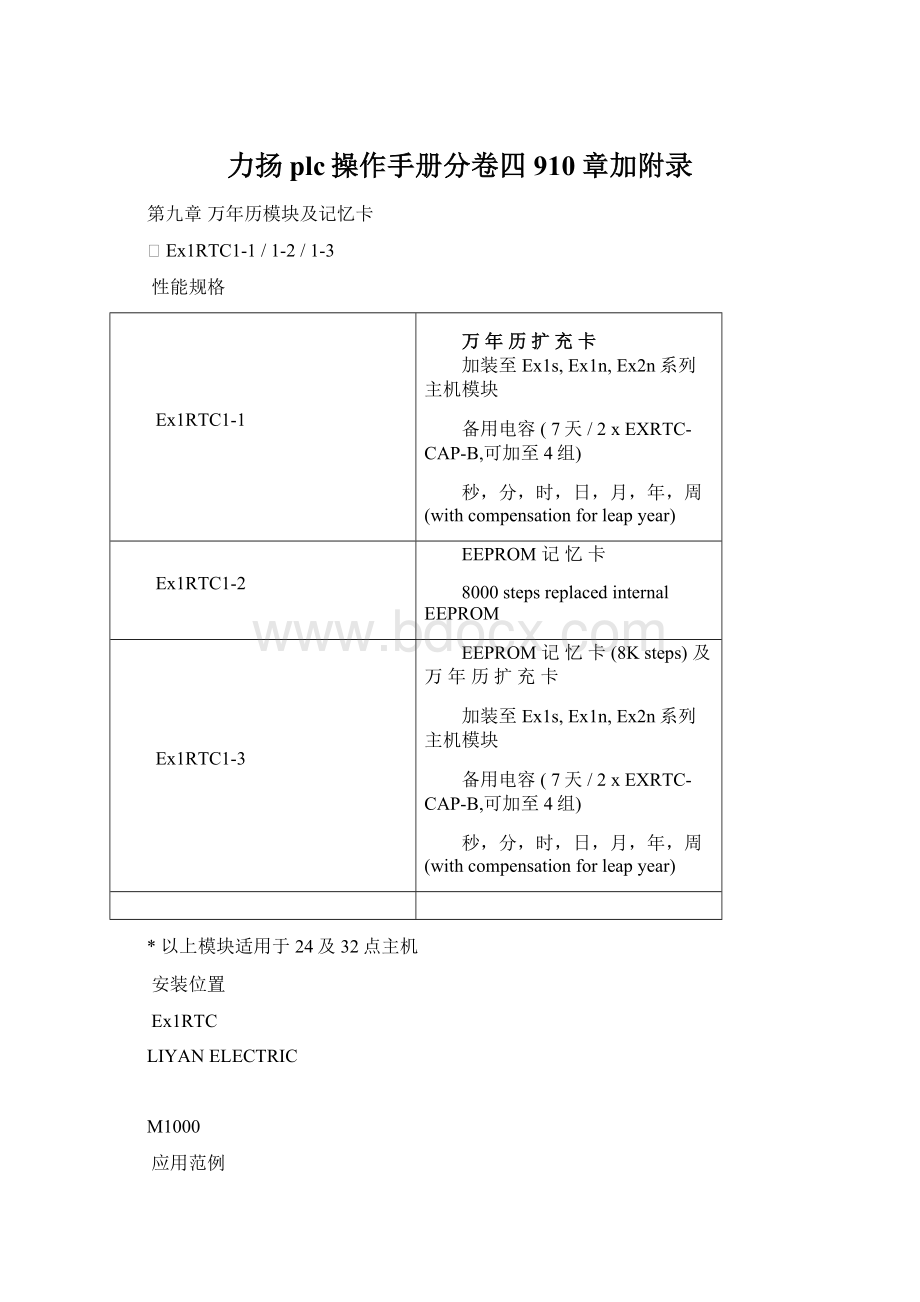
Ex1RTC1-1
万年历扩充卡
加装至Ex1s,Ex1n,Ex2n系列主机模块
备用电容(7天/2xEXRTC-CAP-B,可加至4组)
秒,分,时,日,月,年,周(withcompensationforleapyear)
Ex1RTC1-2
EEPROM记忆卡
8000stepsreplacedinternalEEPROM
Ex1RTC1-3
EEPROM记忆卡(8Ksteps)及万年历扩充卡
加装至Ex1s,Ex1n,Ex2n系列主机模块
备用电容(7天/2xEXRTC-CAP-B,可加至4组)
秒,分,时,日,月,年,周(withcompensationforleapyear)
*以上模块适用于24及32点主机
安装位置
Ex1RTC
LIYANELECTRIC
M1000
应用范例
若读回时间资料错误则M8019ON
[MOVK2D100]
[MOVK7D101]
[MOVK30D102]
[MOVK23D103]
[MOVK59D104]
[MOVK0D105]
[MOVK4D106]
[TWRPD100]
[RSTD200]
[MOVK12D10]
[MOVK30D11]
[MOVK30D12]
[TRDPD0]
[TADDD10D3D20]
[TSUBD20D10D3]
[INCD200]
[RSTM8019]
[END]
第十章伺服定位模块
¥EX200MP
此说明只针对直线插补及圆弧插补加以叙述,其它指令皆与EX系列PLC相同。
直线插补(G01):
最高输出频率60KHz
相关标志位说明:
M8142:
直线插补致能标志位M8186:
直线插补忙碌标志位M8143:
圆弧插补致能标志位M8188:
圆弧插补忙碌标志位
M8134,M8135为相对坐标与绝对坐标选择标志位
Target
Position
Time
X10
[SETM8142]设定直线插补致能标志位
[RSTM8143]清除圆弧插补致能标志位
[RSTM8134]相对坐标位置
[RSTM8135]相对坐标位置
[DMOVK5000D100]向量速度
[S1.]:
向量速度
[S2.]:
X轴终点坐标位置
[S3.]:
Y轴终点坐标位置
[D.]:
Y0或Y1均可
(D8152,D8154)为起点坐标
[DMOVK2000D102]X轴终点坐标位置
[DMOVK400D104]Y轴终点坐标位置
M8142[S1.][S2.][S3.][D.]
[DPLSRD100D102D104Y00]
M8029
[RSTM8029]
[RSTM8142]
圆弧插补(G02,G03):
最高输出频率10KHz
[S1.]:
向量速度[S2.]:
X轴终点坐标位置[S3.]:
Y轴终点坐标位置[D.]:
Y00:
圆心输入方式,Y01:
半径输入方向
若指定为圆心输入模式[D.]指定为Y00,则[S2+4]为X轴圆心坐标,[S3+4]为Y轴圆心坐标
若指定为半径输入模式[D.]指定为Y01,则[S2+4]为半径长度,.[S3+4]:
(Don’tCare)
(I)输入终点绝对坐标、圆心坐标,顺时钟CW方向(G02)
Start
point
X10
[DMOVK0D8152]:
X轴起点位置
[DMOVK0D8154]:
Y轴起点位置
X10
[SETM8143]圆弧插补模式
[RSTM8142]顺时针方向运转
[SETM8134]指定绝对坐标位置
[SETM8135]指定绝对坐标位置
Time
[DMOVK5000D100]:
向量速度
[DMOVK0D102]:
X轴终点坐标位置
[DMOVK0D104]:
Y轴终点坐标位置
[DMOVK500D106]:
X轴圆心坐标位置
[DMOVK500D108]:
Y轴圆心坐标位置
M8143[S1.][S2.][S3.][D.]
[DPLSRD100D102D104Y00]
M8029:
[D.]指定为Y00,圆心运动模式
[RSTM8143]
[RSTM8142]
[RSTM8029]
(II)输入终点绝对坐标、圆心坐标,逆时钟CCW方向(G03)
X10
[DMOVK0D8152]:
X轴起点坐标
[DMOVK0D8154]:
Y轴起点坐标
X10
[SETM8143]:
圆弧插补模式
[SETM8142]:
逆时针方向运转
[SETM8134]:
绝对坐标位置
[SETM8135]:
绝对坐标位置
[DMOVK5000D100]:
向量速度
[DMOVK0D102]:
X轴终点坐标位置
[DMOVK0D104]:
Y轴终点坐标位置
[DMOVK500D106]:
X轴圆心坐标位置
[DMOVK500D108]:
Y轴圆心坐标位置
M8143[S1.][S2.][S3.][D.]
[DPLSRD100D102D104Y00]
M8029:
[D.]指定为Y00,圆心运动模式
[RSTM8143]
[RSTM8142]
[RSTM8029]
(III)输入终点绝对坐标、半径(r)长度,顺时钟方向,若r为正值,则为小圆路径。
若r为负值,则为大圆路径。
CW
X10
[DMOVK-300D8152]:
X轴起点坐标
[DMOVK-400D8154]:
Y轴起点坐标
X10
[SETM8143]:
圆弧插补模式
[RSTM8142]:
顺时针方向运动
[DMOVK5000D100]:
向量速度
[DMOVK300D102]:
X轴终点坐标位置
[DMOVK400D104]:
Y轴终点坐标位置
[DMOVK500D106]:
指定半径长度
[DMOVK0D108]:
Don’tCare
M8143[S1.][S2.][S3.][D.]
[DPLSRD100D102D104Y01]
M8029:
[D.]指定为Y01,半径输入方式
[RSTM8143]
[RSTM8142]
[RSTM8029]
(IV)输入终点绝对坐标、半径(r)长度,逆时钟方向,若r为正值,则为小圆路径。
若r为负值,则为大圆路径。
CCW
X10
[DMOVK-300D8152]:
X轴起点坐标
[DMOVK-400D8154]:
Y轴起点坐标
X10
[SETM8143]:
圆弧插补模式
[SETM8142]:
逆时针方向运动
[DMOVK5000D100]:
向量速度
[DMOVK300D102]:
X轴终点坐标位置
[DMOVK400D104]:
Y轴终点坐标位置
[DMOVK-500D106]:
指定半径长度
M8142
0
1
0
1
M8143
0
0
1
1
功能
独立运转
直线插补
顺时针
圆弧插补
逆时针
圆弧插补
注:
若指定为半径输入方向,则起点坐标与终点坐标不
可以相同。
[DMOVK0D108]:
Don’tCare
M8143[S1.][S2.][S3.][D.]
[DPLSRD100D102D104Y01]
M8029:
[D.]指定为Y01,半径输入方式
[RSTM8143]
[RSTM8142]
[RSTM8029]
附录A力扬PLC与各厂牌界面及驱动器连接图
¥LYPLC与海泰克触摸屏ID-SUB25pin连线图
Ex1s,Ex1nHitechHMI
Miniaturecircular8pinD-SUB25pinFemale
RXD
7
2
TXD
TXD
2
3
RXD
4
RTS
5
CTS
SG
3
7
SG
¥LYPLC-Ex1s,Ex1n与海泰克触摸屏9pin连线图
Ex1s,Ex1nHitechHMI
Miniaturecircular8pinD-SUB9pinFemale
RTS
1
8
CTS
CTS
4
7
RTS
TXD
2
2
RXD
SG
3
5
SG
RXD
7
3
TXD
Note:
PLC8thpindon’tbeconnected.
¥LYPLCEx1n/1sMT型与三菱J2S伺服驱动器连线图
ForuseofEx1n,1spowersupply(24vdc)
EX1N,1SDriverCN1A
24V
9
COM
Z15V
InternalCircuit
InternalCircuit
24G
11
1.2K
1.2K
OPC
24I
1K/0.25W
CA0
Y0
3
PP
Y1
10
SG
CA1
1K/0.25W
20
SG
Y2
2
NP
Y3
SD
24G
1
LG
X0
14
OP
DriverCN1B
P3:
512,CMX
P4:
125,CDV
2000PPS/1Rev
5
10
15
20
¥LYPLCEX1n/1sMT型与安川SGDM-XXAD伺服驱动器连线图
AC220VServoDriverServoMotor
LIYANPLCTSRSGDM-XXADASGMGH-XXACX61
PG
LXL1
NXL2
24V
L3U1(A)
S/SFG
L1CV2(B)
L2CW3(C)
1,104(D)
24GSG
20
*PCO
19
X0PCO
25
X*/COIN+
29
X*/S-RDY+CN2
26
24V/COIN-
30
24G/S-RDY-CN1
3
24IPL1
7Pn000:
0010
CA0PULS
8Pn020:
16384
Y0*PULS
13Pn203:
375
Y1PL2
11Pn50A:
8170
CA1SIGN
12Pn50B:
6548
Y2*SIGN
Y3
¥LYPLCEx1n/1sMT型与信农–“HO”(CN1)
EX1N,1SSinano–“HO”(CN1)
220
24V
24G
24I
45
+24V
CA0
14
PP
Y0
15
PN
Y1
CA1
16
DP
Y2
17
DN
Y3
46
OG
1
SON
4
FSTP
5
RSTP
50
FG
¥附录BEX系列PLC指令一览表
◆基本指令
命令记号
内容
软元件对象
命令记号
内容
软元件对象
LD
A接点逻辑运算开始
X.Y.M.S.T.C
MC
主控指令开始
Y.M.
LDI
b接点逻辑运算开始
X.Y.M.S.T.C
MCR
主控指令结束
无
OUT
线圈驱动
Y.M.S.T.C
MPS
无分歧点开始
无
AND
a接点串联连接
X.Y.M.S.T.C
MRD
无分歧点继续
无
ANI
b接点串联连接
X.Y.M.S.T.C
MPP
分歧点结束
无
OR
a接点并联接续
X.Y.M.S.T.C
END
处理结束
无
ORI
b接点并联接续
X.Y.M.S.T.C
LDP
直接上微分开始运算
X.Y.M.S.T.C
ANB
并联回路群组的串联接续
无
LDF
直接下微分开始运算
X.Y.M.S.T.C
ORB
串联回路群组的并联接续
无
ANP
直接上微分串联连接
X.Y.M.S.T.C
NOP
无处理
无
ANF
直接下微分串联连接
X.Y.M.S.T.C
SET
动作保持
Y.M.S
ORP
直接上微分并联连接
X.Y.M.S.T.C
RST
动作保持解除,缓存器清除
X.Y.M.S.T.C
ORF
直接下微分并联连接
X.Y.M.S.T.C
PLS
上微分输出
Y.M.
INV
运算结果的反转
无
PLF
下微分输出
Y.M.
◆STL指令
命令记号
内容
软元件对象
命令记号
内容
软元件对象
STL
步进阶梯开始
S
RET
步进阶梯终了
无
◆定位指令列表
运转型态
动作叙述
回原点
PLSR
ZRN
ZeroDOGStart
DOGStart
单一速度定位
PLSR
DRVI
DRVA
Start目标地址
相对定位模式,目标地址如相对起始地址
绝对寻址模式,目标地址与相对零点地址
可变速度
PLSV
M8132=1
[S+1]=0
[S+2]=0
M8132=0
[S+1]=0
[S+2]=0
M8132=0
[S+1]=0
[S+2]0
M8132=0
[S+1]0
[S+2]0
手动运转
PLSR
脉冲链可输出于任何频率
加减速反应快速
允许速度可变
◆应用指令
FNCNo.
命令记号
(D)
(P)
内容
Ex1s
Ex1n
Ex2n
FNCNo.
命令记号
(D)
(P)
内容
Ex1s
Ex1n
Ex2n
0
CJ
○
条件跳跃指令
○
○
○
74
SEGL
7段显示器分割输出指令
○
○
○
1
CALL
○
呼叫子程序指令
○
○
○
75
ARWS
箭号开关
─
─
─
2
SRET
子程序返回指令
○
○
○
76
ASC
ASCII码
○
○
○
3
IRET
中断返回指令
○
○
○
77
PR
打印
─
─
─
4
EI
中断允许指令
○
○
○
78
FROM
○
○
BFM读出
─
○
○
5
DI
中断禁止指令
○
○
○
79
TO
○
○
BFM写入
─
○
○
6
FEND
主程序结束指令
○
○
○
80
RS
资料传送
○
○
○
7
WDT
○
看门狗定时器
○
○
○
81
PRUN
○
○
8进制bit转送
○
○
○
8
FOR
循环开始指令
○
○
○
82
ASCI
○
HEXASCII变换
○
○
○
9
NEXT
循环返回指令
○
○
○
83
HEX
○
ASCIIHEX变换
○
○
○
10
CMP
○
○
比较指令
○
○
○
84
CCD
○
确认码
○
○
○
11
ZCP
○
○
区域比较指令
○
○
○
85
VRRD
○
旋钮读出
○
○
○
12
MOV
○
○
传送指令
○
○
○
86
VRSC
○
旋钮刻度
○
○
○
13
SMOV
○
移位传送
─
─
─
88
PID
PID运算
14
CML
○
○
互补指令
○
○
○
15
BMOV
○
区块传送(n点n点)
○
○
○
110
ECMP
○
○
2进制浮动小数点比较
─
─
○
16
FMOV
○
多点传送(1点n点)
○
○
○
111
EZCP
○
○
2进制浮动小数点区域比较
─
─
○
17
XCH
○
○
数据交换指令
○
○
○
118
EBCD
○
○
2进制浮动小数点10进制浮动小数点
─
─
─
18
BCD
○
○
BINBCD变换指令
○
○
○
119
EBIN
○
○
10进制浮动小数点2进制浮动小数点
─
─
─
19
BIN
○
○
BCDBIN变换指令
○
○
○
120
EADD
○
○
2进制浮动小数点加算
─
─
○
20
ADD
○
○
BIN加算(S1)+(S2)(D)
○
○
○
121
ESUB
○
○
2进制浮动小数点减算
─
─
○
21
SUB
○
○
BIN减算(S1)(S2)(D)
○
○
○
122
EMUL
○
○
2进制浮动小数点乘算
─
─
○
22
MUL
○
○
BIN乘算(S1)(S2)(D)….(D)
○
○
○
123
EDIV
○
○
2进制浮动小数点除算
─
─
○
23
DIV
○
○
BIN除算(S1)(S2)(D)….(D)
○
○
○
127
ESQR
○
○
2进制浮动小数点2进制浮动开平方根
─
─
○
24
INC
○
○
BIN递增(D)+1(D)
○
○
○
129
INT
○
○
2进制浮动小数点BIN整数转换
─
─
○
25
DEC
○
○
BIN递减(D)-1(D)
○
○
○
130
SIN
○
○
浮动小数点SIN运算
─
─
○
26
WAND
○
○
逻辑与(S1)AND(S2)(D)
○
○
○
131
COS
○
○
浮动小数点COS运算
─
─
○
27
WOR
○
○
逻辑或(S1)OR(S2)(D)
○
○
○
132
TAN
○
○
浮动小数点TAN运算
─
─
○
28
WXOR
○
○
异或(S1)(S2)(D)
○
○
○
147
SWAP
○
○
上下字节(Byte)交换
○
○
○
29
NEG
○
○
补码/(D)+1(D)
○
○
○
155
ABS
○
ABS现在值读出
─
─
─
30
ROR
○
○
右回旋指令
○
○
○
156
ZRN
○
回原点
○
○
○
31
ROL
○
○
左回旋指令
○
○
○
157
PLSV
○
脉冲输出
○
○
○
32
RCR
○
○
含进位右回旋指令
○
○
○
158
DRVI
○
相对定位
○
○
○
33
RCL
○
○
含进位左回旋指令
○
○
○
159
DRVA
○
绝对寻址
○
○
○
34
SFTR
○
位元右移指令
○
○
○
160
TCMP
○
时间数据比较
○
○
○
35
SFTL
○
位元左移指令
○
○
○
161
TZCP
○
时间数据比较范围
○
○
○
36
WSFR
○
字符右移指令
○
○
○
162
TADD
○
时间数据加算
○
○
○
37
WSFL
○
字符左移指令
○
○
○
163
TSBU
○
时间数据减算
○
○
○
38
SFWR
○
字符FIFO写入指令
○
○
○
166
TRD
○
时间数据读出
○
○
○
39
SFRD
○
字符FIFO读出指令
○
○
○
167
TWR
○
时间数据写入
○
○
○
40
ZRST
○
区域复置指令
○
○
○
169
HOUR
○
时间表
─
─
─
41
DECO
○
译码指


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 力扬 plc 操作手册 分卷 910 附录
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 广东省普通高中学业水平考试数学科考试大纲Word文档下载推荐.docx
广东省普通高中学业水平考试数学科考试大纲Word文档下载推荐.docx
-
计算题测试文档格式.docx
-
会计年终总结范文精选10篇Word文件下载.docx
-
基坑支护及降排水方案Word格式文档下载.docx
-
古代诗歌鉴赏一剪梅学案Word文档格式.docx
-
国标舞考级Word文件下载.docx
-
机电工程质量验收规范是什么Word文档下载推荐.docx
-
技术员工作自我评价文档格式.docx
-
交警支队车棚改造工程施工合同文档格式.docx
-
护士变更注册申请审核表与示范文本Word文档下载推荐.docx
-
最新学校新冠肺炎疫情防控应急预案Word文件下载.docx
-
GB50204钢筋规范之欧阳总创编Word格式文档下载.docx
-
《半期整改措施》Word格式.docx
-
诊断 症状学腰背痛关节痛汇总.docx
-
英美文学欣赏The Analysis of Shelleys Ode to the West Wind.docx
-
增值税营改增所得税消费税车购税测试题.docx
-
整理二级建造师管理真题.docx
-
英语三级重点高频词汇导入背单词APP使用.docx
-
浙教版学年九年级数学上册第2章测试题及答案.docx
-
证件照教学设计方案.docx
-
优品课件之《从锁国走向开国的日本》教案.docx
-
整理北京交通大学万用表组装实验报告.docx
-
质量管理计划.docx
-
有机化学鉴别.docx
-
整理照明灯饰灯具行业分类英语词汇.docx
-
濉溪县城市总体规划公示.docx
-
智能化工程质量验收记录表.docx
-
学生会纪检部工作总结.docx
-
幼儿园保教主任发言稿.docx
-
跆拳道协会工作总结.docx
-
中国茶叶店连锁市场竞争分析与竞争战略研究报告.docx
-
学宪法讲宪法主题演讲稿800字精选5篇弘扬宪法精神演讲稿5篇.docx
-
matlab学习心得.docx
-
C易拉罐.docx
-
C程序 移格子.docx
-
232865 北交《国际商法》在线作业一 15秋答案.docx
-
1900高考语言应用题汇编大全.docx
-
A地块炸礁方案0830.docx
-
proteus元件库.docx
-
BTG Spec3.docx
-
PCR引物流程设计详解.docx
-
QJ025#4机中低压管道安装作业指导书.docx
-
11列类型MySql51.docx
-
C语言单片机交通灯毕业设计.docx
-
Excel表格操作技巧汇总163招中.docx
-
SAPERP项目PP模块转计划订单为采购申请操作手册V.docx
-
GBSS信息共享第九期BTS3012开局问题专题0428B10.docx
-
gb17258车用天然气高压气瓶标准doc.docx
-
3500常用汉字.docx
-
HP1005硒鼓加粉完全拆解图解.docx
-
《盘古开天地》优秀教案13.docx
