 B1包全景设备.docx
B1包全景设备.docx
- 文档编号:4883050
- 上传时间:2022-12-11
- 格式:DOCX
- 页数:75
- 大小:39.32KB
B1包全景设备.docx
《B1包全景设备.docx》由会员分享,可在线阅读,更多相关《B1包全景设备.docx(75页珍藏版)》请在冰豆网上搜索。
B1包全景设备
B1包、全景设备
一、供应商资格要求
1、符合《中华人民共和国政府采购法》第二十二条的规定。
2、供应商的资质要求:
无
二、技术要求
一、技术要求
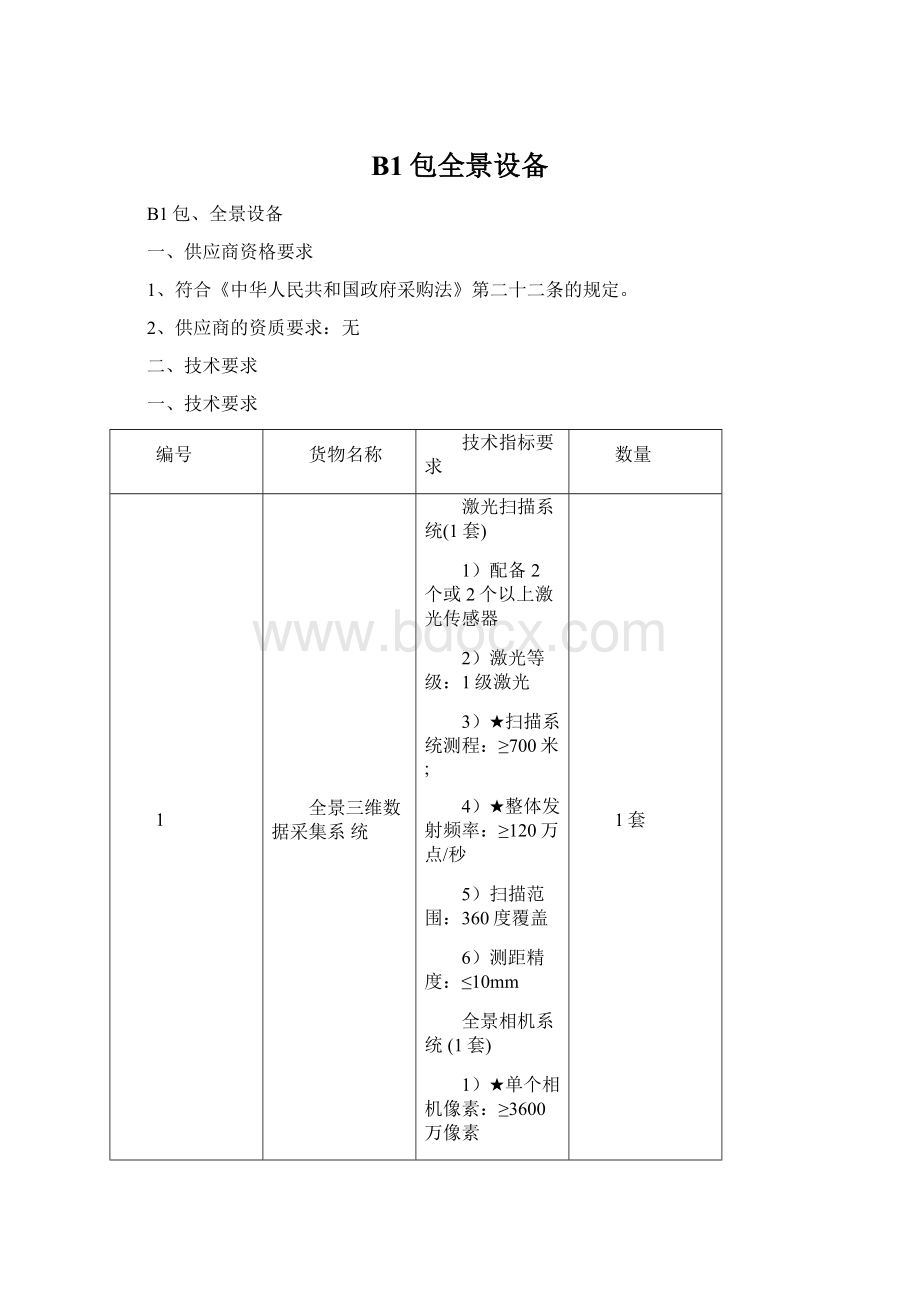
编号
货物名称
技术指标要求
数量
1
全景三维数据采集系统
激光扫描系统(1套)
1)配备2个或2个以上激光传感器
2)激光等级:
1级激光
3)★扫描系统测程:
≥700米;
4)★整体发射频率:
≥120万点/秒
5)扫描范围:
360度覆盖
6)测距精度:
≤10mm
全景相机系统(1套)
1)★单个相机像素:
≥3600万像素
2)全景影像拼接后分辨率:
≥7000万像素
3)有效视场角:
360°*270°
4)影像自动拼接率:
≥98%
5)影像拼接误差:
≤3pixels
惯性导航系统(1套)
1)GNSS信号无失锁时指标(PP后处理)
定位精度(X/Y/Z):
0.01/0.01/0.02m
姿态精度(P/R/H)0.008º/0.008º/0.012º
2)数据更新率:
≥200Hz
3)工作温度范围:
-20℃~+60℃
4)启动时间:
≤60s
GNSS接收机(1套)
1)高精度双频多星专用接收机,至少能接收GPS、GLONASS、北斗等系统信号;
2)通道数:
≥120通道;
3)数据采样频率:
≥1Hz,采样频率可调;
4)能接收获取区域CORS系统等虚拟参考站数据
5)观测数据至少包括:
L1/L2载波,L1、L2、L1CA、L2C、L2E、L3、L5、卫星广播星历;
6)测量精度:
静态定位精度:
平面≥5mm+1ppm;
高程≥10mm+2ppm;
RTK定位精度:
平面≥10mm+1ppm;
高程≥20mm+2ppm;
7)工作温度:
-40℃~+75℃;
8)具备抗多路径双频测量型天线,相位中心稳定性≤1mm
车轮编码器(1套)
1)防水防尘等级:
IP65
2)分辨率:
≤2cm
控制系统计算机(2台)
1)系统控制笔记本电脑主要技术指标:
处理器:
Inteli7;
处理器主频:
3.0GHz;
内存:
≥8GBDDR3;
硬盘:
≥1TB固态硬盘;
USB3.0接口不少于3个;
≥14吋显示屏
2)操作系统:
正版的Windows764位或更高版本微软操作系统
同步控制器(1套)
1)通过GPS的PPS信号授时
2)同步精度:
≤0.05ms
机械平台(1套)
1)整机一体化设计,搭载以上所有设备,可拆卸
2)配套提供城市测量汽车(车型要求为SUV、五门七座、2.0排量)、沙滩摩托、手推车等搭载工具各一辆
1套
2
空中全景相机系统
全景相机(1套)
1)★分辨率:
≥6000万像素
2)有效视场角:
360°*270°
无人机(1套)
1)机体材质:
碳纤维
2)巡航速度:
≥40km/h
3)抗风能力:
≥6级
4)续航时间:
≥45min
5)动力:
锂电池
6)起降方式:
手动遥控/自主控制
7)任务载荷:
≥5kg
惯性导航系统(1套)
1)GNSS信号无失锁时指标(PP后处理)
定位精度(X/Y/Z):
0.01/0.01/0.02m
姿态精度(P/R/H)0.008º/0.008º/0.012º
2)数据更新率:
≥200Hz
3)工作温度范围:
-20℃~+60℃
4)启动时间:
≤60s
集成惯性导航系统和全景相机,提供转换云台,与全景相机可拆卸互换
1套
3
单人背负式全景影像采集系统
激光扫描系统(1套)
1)扫描距离:
≥50m
2)激光发射频率:
≥50000点/秒
3)测距精度:
≤20mm
4)角度分辨率:
≤0.25°
全景相机系统(1套)
1)★分辨率:
≥3000万像素
2)有效视场角:
360°*270°
定位定姿系统(1套)
1)定位精度(X/Y/Z):
不低于0.2/0.2/0.5m;
2)姿态精度(P/R/H):
不低于0.1/0.1/0.2°
3)数据输出频率:
不低于200Hz
供电系统(1套)
输出电压8V,持续工作不小于4小时
数据存储传输系统(1套)
内存不小于240G;USB3.0接口
设备重量:
≤20Kg
防护等级:
≥IP65
1套
4
系统配套软件
车载设备操控软件(1套)
1)提供对GPS、IMU、里程计、激光器、全景相机的启动、运行或停止等状态操控和参数设置,可实时监控与显示卫星分布、卫星数量、GPS坐标、GPS时间、车辆行驶轨迹以及车辆航向等信息与状态和当前采集的数据;
2)可以安装在便携式笔记本电脑上使用;
3)支持XX、Google背景地图加载;
4)提供异常信息(网络中断、传感器异常等)语音提示报警功能;
5)实现与外业规划软件对接,实时显示已采集的线路;
单人背负式移动测量集成操控软件(1套)
1)提供对GPS、IMU、激光器、全景相机的启动、运行或停止等状态操控和参数设置,可实时监控与显示卫星分布、卫星数量、GPS坐标、GPS时间、车辆行驶轨迹以及车辆航向等信息与状态和当前采集的数据;
2)支持XX、Google背景地图加载;
3)提供异常信息(网络中断、传感器异常等)语音提示报警功能;
4)实现与外业规划软件对接,实时显示已采集的线路
5)支持IOS、安卓、windows操作系统;
外业规划软件(1套)
1)支持在XX/GOOGLE地图上,进行外业采集的线路规划设计;
2)支持外业采集组及人员信息的自定义添加及管理;
3)支持单向线路及双向线路规划功能,并提供线路管理工具;
4)支持根据每个组每天实际工作量,对已规划的线路自动进行外业采集任务的分包;
5)自动统计外业采集的各种信息,并输出报表;
6)支持规划线路导出shp数据文件,可与设备操控软件进行数据交换;
融合解算(1套)
1)提供定位定向数据集成处理功能,实现多种方法的GPS数据差分、GPS/IMU数据、车轮编码数据集成处理;
2)根据POS输出的高精度轨迹数据,自动生成激光点云(支持HLS、LAS、XYZ格式)和带定位坐标的影像。
3)支持车辆静止时重复圈点云自动剔除;
4)支持CGCS2000坐标转当地坐标功能;
5)实现行车轨迹数据(时间、位姿信息等)、点云数据、图像数据三者的自动匹配,并能加载同一位置区域的不同时期的遥感影像、矢量数据等;
点云处理(20套)
1)提供多种点云渲染方式,如:
高程、循环色带、反射强度、RGB、分类渲染等,并支持用户配置;
2)提供点云手工编辑过滤及多种方式的自动扫描过滤,根据应用需求过滤不需要的点云;
3)全景影像和激光点云的配准,支持点云着色;
4)支持阳光噪点、地面点与非地面点自动化过滤;
5)实现从图像或点云数据上进行目标物自动、半自动或手动分类、矢量提取,支持行道树自动化、道路标示线半自动分类提取,制作线划图(DLG)、DSM、DEM;实现在进行目标物矢量提取时,直接建立GIS数据库,将矢量提取以shp、mif、dxf、dbf、mdb等多种格式出,支持shp矢量数据自定义导入;
6)支持行道树树冠、胸径、树高半自动化快速提取;
7)支持基于点云的道路护坡坡度量测、道路通行净空分析检测;
8)支持基于点云的DEM/TIN三维实时显示渲染、正射影像与DEM叠加融合显示;
9)提供与AutoCAD联合进行基于点云的数字化测图功能,采集提取成果,可实时输出到AutoCAD中;
10)支持多种点云数据格式的导入导出,包括obj、dxf、xyz、las、bin等;
11)支持车载与背负、机载三维激光扫描点云加载及拼接;
海量点云浏览软件(2套)
1)实现点云数据的实时动态交互浏览;
2)支持海量(10亿点以上,15G以上)点云读取加载速度<2秒;
3)实现30帧/秒的浏览;
影像处理软件(20套)
1)支持全景影像拼接预览;匀光/不匀光效果切换预览;全景影像的直方图预览,任意站点全景跳转预览;
2)支持全景影像自动拼接,支持GPU并行计算、多核CPU并行、多进程、多任务、自动化多任务批量处理输出;
3)支持全景叠加显示所有拼接线,支持手动修改拼接线,实时浏览修改后效果,所见即所得;
4)支持自动提取的全景同名点显示,能够手工添加、拉框添加、拉框删除同名点,编辑同名点后实时浏览修改后效果;
5)支持对光斑、污点等局部图像进行修补与处理,修补操作可撤消/重做;
6)提供图像去雾功能,支持全景图像亮度、色彩饱和度以及图像压缩率等调整。
7)提供全景影像球面预览功能,在三维引擎中,浏览全景影像。
测图建库
1)提供基于激光点云的数字化符号测图功能,支持点、线、面地物要素采集;
2)提供基于高清全景的数字化符号测图功能,支持点、线地物要素采集;
3)提供地图符号库,符号库符合地形图标准图示符号,支持用户自定义地图符号;
4)支持基于点云自动生成地形等高线;
5)提供数据输出接口,支持常用数据格式导出
6)可集成于AutoCAD和ArcGIS中运行;
点云精细建模(20套)
1)支持点云建模单视口和多视口两种作业视图浏览模式;
2)支持多种点云渲染模式(真彩色显示、Z值渲染、区域渲染、跳变渲染、强度渲染);
3)提供多种点云裁切处理功能,支持任意视图单切片、多重切片处理;
4)提供点云截面管理,支持切片显示/隐藏、颜色设置、导出输出、删除清空;
5)提供多种点云编辑选择功能;
6)根据选中的点云自动拟合面,支持自动实现两面交线、三面交点功能;
7)根据选中的点云自动拟合圆柱,支持圆柱弯头自动连接拟合功能;
8)支持基于多重切片自动拟合曲线功能;
9)支持第三方建模软件的数据接口;
10)支持多种点云数据格式的导入导出;
数字城市建模(20套)
1)基于3DMax平台,实现多源数据管理,支持激光点云、全景、DOM、DLG、模型、纹理数据等;
2)基于DLG与点云数据,提供一键式批量模型自动构建功能;
3)支持基于高清全景影像高效进行模型对象立面纹理提取;
4)支持基于航拍DOM数据高效进行模型对象顶部纹理提取;
5)支持基于点云与全景进行道路模型半自动构建;
虚拟三维平台(20套)
1)加载三维模型,支持桌面端与互联网B/S两种虚拟三维浏览模式;
2)提供虚拟三维漫游浏览体验,支持任意角度方向漫游浏览;
3)三维浏览视角支持第一人称、第三人称、飞行三种视角模式;
4)支持三维场景自然效果(晴、雨、雪、雾等)模拟切换;
5)支持真实街景切换到虚拟三维场景浏览模式;
街景生产(20套)
1)提供路网编辑功能,支持自动建立轨迹邻接关系;
2)支持轨迹路网自动在线识别并更新路名信息;
3)支持离线背景地图(XX/GOOGLE)数据加载
4)能够基于三维激光点云进行手动以及自动化提取三维面片;
5)支持已提取的面片反投到轨迹地图视图中,进行遗漏检查;
6)可对人脸和车牌进行自动化隐私模糊处理,自动化模糊识别率>80%;
7)提供隐私模糊化手工处理,提供矩形、椭圆、多边形区域模糊工具,支持高清图像模糊;
8)支持SHP矢量数据自定义导入,支持在街景中反投展示;
9)支持点、面、三维标注的添加、删除、属性编辑等功能,支持SHP格式POI标注数据的批量入库;
10)支持标注符号化显示,提供国标化的标注符号,支持自定义标注符号入库和属性动态扩展;
11)支持多数据源(车载、空中、单人背负、单点室内全景)轨迹路网一体化编辑处理及生产;
街景发布与展示(20套)
1)提供街景导航浏览体验,支持街景逐点导航浏览与自动连续导航浏览;
2)支持路名、路口导向标注,支持地名地址信息定位显示;
3)支持鼠标探面效果,提供基于鼠标探面的街景定位跳转体验;
4)支持基于全景的长度、面积量测功能,配置量测线宽与线色;
5)支持按距离、分类显示文字、音频、视频、三维模型POI标注信息;
6)支持POI标注二级分类、快速模糊查询定位;
7)支持影像上定位点热点连接(视频、网站、属性),支持外部三维模型成果导入显示,支持位置、大小、方向调整;支持外部视频监控画面调入显示;
8)支持在前端快速提取记录热点站点,支持直接跳转定位;
9)支持自动识别多时相路段街景,并一键切换浏览;
10)支持车载、空中、地面、室内街景一体化集成展示浏览;
11)支持三维场景自然效果(雨天、下雪、晴天等)多种模拟场景切换;
12)支持与二维地图(在线、离线)联动显示;
13)支持平台软件工具栏自定义配置,支持插件式扩展定制开发;
14)提供JavaScript、Flex二次开发接口,支持与其他应用系统集成;
15)支持分布异地多区域街景共享服务访问;
16)三维全景应用平台发布服务支持Window及Linux两种操作系统环境;
移动街景(20套)
1)支持多种终端设备(手机、平板电脑等);
2)支持Android与IOS操作系统;
3)提供在线与离线两种街景三维浏览模式;
4)提供街景导航浏览体验;
5)支持路名、路口导向标注,支持地名地址信息定位显示;
6)支持POI标注信息显示;
7)支持与二维地图联动显示;
8)支持陀螺仪方向感应;
投标人需对软件以下功能进行现场视频演示
1、外业规划
1)在XX或Google地图上,进行外业采集的线路规划设计;
2)单向线路及双向线路规划功能;
2、点云处理
1)行道树自动化、道路标示线半自动分类提取;
2)基于点云的DEM/TIN三维实时显示渲染、正射影像与DEM叠加融合显示;
3)车载、背负及机载三维激光扫描点云加载及拼接;
3、影像处理
1)自动提取的全景同名点显示,并能够手工添加、删除同名点,编辑同名点后实时浏览修改后效果;
4、点云建模
1)根据选中的点云自动拟合面,自动实现两面交线、三面交点功能;
2)根据选中的点云自动拟合圆柱,圆柱弯头自动连接拟合功能;
3)基于多重切片自动拟合曲线功能;
5、城市建模
1)基于DLG与点云数据,提供一键式批量模型自动构建功能;
2)基于高清全景影像进行模型对象立面纹理提取;
6、虚拟三维平台
1)三维场景自然效果(晴、雨、雪、雾等)模拟切换;
2)真实街景切换到虚拟三维场景浏览模式;
7、街景生产
1)轨迹路网自动在线识别并更新路名信息;
2)基于三维激光点云进行高效的自动化提取三维面片;
3)已提取的面片反投到轨迹地图视图中,进行遗漏检查;
4)对人脸和车牌进行自动化隐私模糊处理;
8、街景发布与展示平台
1)基于鼠标探面的街景定位跳转体验;
2)基于全景的长度、面积量测功能,可配置量测线宽与线色;
3)外部三维模型成果导入显示,位置、大小、方向调整;外部视频画面调入显示;shp矢量数据自定义导入在街景中反投展示;
4)车载、空中、背负、室内街景一体化集成展示浏览;
5)三维场景自然效果(雨天、下雪、晴天等)多种模拟场景切换;
1套
二、服务要求
1)激光扫描仪、惯导装置、全景相机提供原厂3年免费质保,系统集成提供终生免费质保。
2)自合同生效之日起60日内将采购人所购设备送到指定地点,激光扫描仪、全景相机、定位定姿系统提供权威部门出具的检定证书。
3)产品维修与维护响应时间:
提供7×24小时服务,中标人在接到用户电话、传真通知后,30分钟内响应,24小时内派技术人员抵达现场进行维修。
4)技术培训。
采取上门培训方式,提供30天技术培训,确保技术人员能够全套掌握设备的操作以及数据的处理;派1~2个技术人员跟踪指导完成一个项目的整套流程,直至掌握实际操作;
5)软件服务:
免费提供全套软件的终身服务,免费提供软件升级服务。
三、其它要求
1、按技术要求提供软件功能相关视频资料的现场演示;
2、数据演示:
演示全景数据采集系统及单人背负式全景数据采集系统自开标之日起近两个月内实地采集原始数据及成果数据情况。
注:
以上加“_________”部分为★条款内容,如不满足,按无效投标处理。
三、投标保证金
1、投标保证金数额:
人民币壹拾贰万圆整(¥120000.00)。
2、投标保证金交纳采用下列形式之一:
银行本票、银行汇票、电汇。
投标保证金为电汇形式的,汇款单上须注明采购项目编号、包号。
若交款人名称与投标人名称不一致,投标人须出具加盖公章的书面材料,退款时,款项退至投标人帐户。
收款单位:
山东省省级机关政府采购中心
开户银行:
建行济南市高新支行黄金时代分理处
银行帐号:
37001618819059099999
大额联行号:
105451001046
C1包、应急监测车
一、供应商资格要求
1、符合《中华人民共和国政府采购法》第二十二条的规定。
2、供应商的资质要求:
无
二、技术要求
一、项目概述
应急监测车包括省级应急监测车和县级应急监测车。
省级应急监测车包括省级国家海域动态监控综合指挥车、省级车载视频会议系统、通信系统、监视监测系统、集中控制系统、北斗定位导航系统、单兵图传背包、数据处理系统和监测车配套固定翼无人机系统。
县级应急监测车包括县级国家海域动态监控指挥车、车载视频采集系统、移动数据传输系统、车载视频会议系统、单兵视频会议系统。
投标人需对各系统进行总体集成,使其具备无人机系统储存及运输、指挥控制、航迹显示、载荷与链路监控、监测视频实时显示以及数据的预处理、存储等任务功能;可采用视频会议对县级应急监测设备进行现场统一调度指挥;具备3G/4G通信、卫星通信、北斗定位导航等功能。
本项目包含应急监测系统的设计、改装、采购、集成、包装、保险、车辆公告、运输、装卸、安装、调试、车辆上牌、无人机系统试飞、系统培训、验收保修等全部内容,为“交钥匙”工程。
二、省级应急监测车技术要求
序号
设备名称
招标要求的技术指标
数量
1
省级国家海域动态监控综合指挥车(含车辆改装)
1.系统集成要求
1)支持卫星通信、3G/4G双备份通信链路,通信带宽不低于2Mbps;
2)采集的信息要求可接入国家海洋局海域动态专网,并支持与县级应急监测设备、国家海洋局“海域动态监视监测管理系统”进行数据交互;
3)可利用3G/4G无线网络、卫星通信、地面有线网络接入等方式实现无人机监测数据向海域动态专网的传输,可在“海域无人机业务监控与管理系统”实时显示无人机视频及航迹;
4)可利用3G/4G无线网络、卫星通信、地面有线网络接入等方式实时接入海域动态专网视频会议系统,实现与指挥中心及海域动态专网中其它节点的视频会议功能;
5)配备车载云台摄像头,对车辆周围环境进行监视,监控监测视频可实时接入“海域动态监视监测管理系统”及海域动态专网视频会议系统;
6)支持北斗定位导航功能,测速精度不低于0.1m,定位精度不低于5m,要求在指挥中心实时监测显示车辆位置和轨迹;
7)能够与单兵图传背包通信,通信距离在通视条件下≥5km,支持单兵图传背包采集的图像、视频信息接入指挥车内,并通过3G/4G无线网络、卫星通信、地面有线网络等方式将采集的图像、视频实时接入“海域动态监视监测管理系统”及海域动态专网视频会议系统;
8)具备≥6名作业人员及配套固定翼无人机设备的运输保障能力,不得人货混装;
9)可通过车载智能配电设备及智能手持终端实现对视频会议、视频监控、数据存储、灯光照明等设备的集中控制及系统供电状态监测;
10)具备三维全景激光扫描系统的安装机构,考虑三维全景激光扫描系统的视野及作业效果,合理设置安装位置。
11)整套系统要求按国家海洋局要求进行统一喷涂。
2.车辆平台:
★原车车身长度≥7300mm,宽度≥1900mm,高度≥2800mm;轴距≥4300mm,最小离地距离≥160mm;最大功率≥110KW@3800rpm;汽车排放环保标准达到国V;采用柴油驱动,排量≥2.0L,最高车速≥120km/h,最大扭矩≥330N.m@1200~2400rpm,;油箱容积≥75L;车辆满载质量≥4.5吨。
3.车体改装要求
1)车顶处理
a)车顶平台要求采用不锈钢材质,加强筋加强,承重能力≥1000kg;
b)对车顶平台进行防雨防水防锈处理,焊接处进行防潮防锈处理,能承受的强度为10~25mm/24h的降雨,车内和车壁内部不应有渗水和漏水现象,具体参照GJB367A-2001;
c)对车顶平台进行保温隔热处理;
d)利用预埋件、车顶钢梁等对云台与静中通天线进行安装固定处理,预留三维全景激光扫描系统的安装机构;
e)考虑车顶设备维修安全性和方便性,对车顶平台进行防滑处理,加装不锈钢车顶护栏;
f)增加防雨罩。
2)车内改装及美化
a)整车分为驾驶舱与工作储运舱两个部分;
b)在运输模式下,工作储运舱要求具备搭载固定翼无人机系统、RTK、全站仪等外业设备的能力;货物储运空间不小于2300mm×800mm×1900mm;驾驶舱具备不小于6人的运输能力;
c)在工作模式下,工作储运舱要求具备办公条件,满足不小于6人同时办公;
d)显示屏边缘进行压边处理,驾驶舱留有维修门;
e)驾驶舱及工作储运舱要求整体采用优质复合板进行铺平处理,具备隔热、防静电特点,超纤皮进行压边处理;
f)地面铺设具有防静电、防滑等特性的多层次金属地板;
g)对车内进行遮光处理,电动控制窗帘升降。
3)座椅:
驾驶舱座椅数量≥6个;工作储运舱沙发椅满足≥6人乘坐;全部座椅全身采用野外作业耐磨皮质材料包裹。
4)照明:
工作储运舱采用LED光源实现舱内照明;车尾设置LED作业照明灯;车顶摄像头云台配备LED强光照明灯具。
5)茶几、会议桌:
茶几、会议桌材质采用复合木板,表面进行喷漆处理,喷漆颜色须与车内饰相协调;茶几、会议桌可折叠收纳。
6)箱体固定装置:
采用不锈钢地锚钩,数量不少于6个,可提供拉力不小于20000N。
7)空调:
保留原车空调,并在工作储运舱加装一体式吸顶空调,具备市电单独供电能力;一体式吸顶空调制冷量不小于4000W。
8)车载发电机
a)安装交流取力发电机,与原车辆电气系统相互独立。
要求取力发电机内部不采用逆变器可直接输出220V交流电;最大输出功率不低于7.0KW,功率因数不低于0.9;
b)具备电磁屏蔽功能,车辆行驶和怠速时提供稳定电源输出,不影响车辆负载能力,平均无故障时间(MTBF)≥8000小时。
9)UPS:
UPS的额定功率不低于4KW;工作设备经UPS提供电源,在无外部电源和取力发电机输入情况下,提供不低于15min应急供电时间,并预留扩展原厂电池包接口。
10)车顶云台
a)车顶云台数量不少于2套,具备升降、旋转功能,升降高度不低于1.8米,升起时间不高于30s;
b)配备夜间照明灯;
c)具备自动升降功能,支持应急手动模式,控制器类型支持有线/无线;
d)水平旋转角度范围≥360°,垂直旋转角度范围≥300°。
11)三联机柜
a)采用铝合金架构;
b)满足总计≥45U设备的有效安装;
c)具备不小于8台显示器内嵌安装的空间;
d)具备金属工作台面,预留≥2套金属键盘,不少于2套无人机摇杆,不少于1套视频会议摄像头安装接口及空间;
e)机柜底部内置减震器;机柜顶部安装轴流风机;机柜后留有维修门及维修通道。
12)配电箱:
采用冷轧钢材质;支持报警响应,满足车载设备供电需求,预留≥3个备用接口;采用标准空开元器件;配电系统电压、电流值可进行数字显示。
13)配套设备
a)至少包含爬梯、线缆盘、固定绷带、信号接口箱、电源接口箱、土木工具箱、维修工具箱、灭火器、收纳箱、油


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- B1 全景 设备
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《雷雨》中的蘩漪人物形象分析 1.docx
《雷雨》中的蘩漪人物形象分析 1.docx
-
《经济法基础》第三章章节练习与答案解析.docx
-
安徽省合肥市包河区卫生健康系统招聘试题及答案解析.docx
-
《河中石兽》复习过程.docx
-
版二级建造师《公路工程管理与实务》考前检测 附答案.docx
-
保密安全制度监理组5篇修改版.docx
-
北师大版届九年级上学期期末考试英语试题I卷.docx
-
PACE产品及周期优化法系统结构复习课程.docx
-
常规变电站常规设计.docx
-
初三欧姆定律计算题题型整理.docx
-
《测绘管理与法律法规》模拟试题一附答案.docx
-
2测风工岗位练兵技术比武.docx
-
《小学语文不同课型的教学模式参考》1.docx
-
15高考宁夏英语及答案教学内容.docx
-
ABS圆形笔筒课程设计说明书.docx
-
c语言程序填空题.docx
-
茶艺师高级三级教学计划大纲.docx
-
场平土石方工程施工项目组织设计.docx
-
《人力资源管理》期末试题及答案教学内容.docx
-
《河南省高等学校教师实验人员中高级专业技术职务任职资格申报评审条件试行.docx
-
01钢结构制作施工工艺标准文档.docx
-
IIR数字滤波器的设计流程图.docx
-
005纺丝作业指导书.docx
-
1991高考化学试题.docx
-
GMP审核检查表与审核员指南.docx
-
成本会计试题二.docx
-
14001讲师心态调整培训讲座讲义体验版共14页文档.docx
-
cpld矩阵键盘.docx
-
《金融服务营销》.docx
-
NHR100过程校验仪140408.docx
-
Q+ Web 改版设计小结.docx
-
八年级上册古诗词鉴赏含参考答案.docx
-
艾默生 ES2402变频器调试指导书.docx
-
爱唠叨的妈妈作文400字.docx
-
爱家乡爱祖国作文.docx
-
版PEP小学英语四年级下册教学教案及教学计划.docx
-
安达市电子务进农村综合示范县工作方案.docx
-
安徽合肥1819学度高三上第一次教学质量检测英语.docx
-
办公楼计算书消防改.docx
-
安徽工程大学机电学院本科毕业设计论文开题报告.docx
-
办公用品采购框架协议.docx
-
安徽省皖南八校届高三模拟考试理科综合试题及答案.docx
-
安全工程师《安全生产法及相关法律知识》模拟试题 附答案.docx
-
包装测试技术答案docx.docx
-
安全工程师《生产技术》第七章二节1.docx
-
β内酰胺类抗生素导致药源性溶血的初步研究.docx
-
报关员水平测试练习题.docx
-
爱的容器耐心 倾听能力差事事不耐烦没耐心是病.docx
-
北京市建筑工程门窗采购协定4买卖协定doc.docx
-
案例分析冲刺训练.docx
-
爱婴医院儿科工作总结.docx
