 七自由度柔性机械臂机构说明.docx
七自由度柔性机械臂机构说明.docx
- 文档编号:4812911
- 上传时间:2022-12-09
- 格式:DOCX
- 页数:14
- 大小:335.88KB
七自由度柔性机械臂机构说明.docx
《七自由度柔性机械臂机构说明.docx》由会员分享,可在线阅读,更多相关《七自由度柔性机械臂机构说明.docx(14页珍藏版)》请在冰豆网上搜索。
七自由度柔性机械臂机构说明
七自由度柔性机械臂机构说明
设计目标
由于人工成本的不断提升,人们的刚性需求也不断的扩大,生产自动化越来越被人们所重视。
也是社会发展的必然。
让机器人去完成一些高危、肮脏、重复、精度高的工作。
由此,设计一款高精度,高灵活性的机器臂显得更为重要。
设计的目标:
高精度仿人工业机器人。
运用先进的仿生理论与柔性设计为基础,设计开发用二次式运动反馈来实现其高精度控制,合理的仿人机构来完成动动。
机械臂整体设计方案
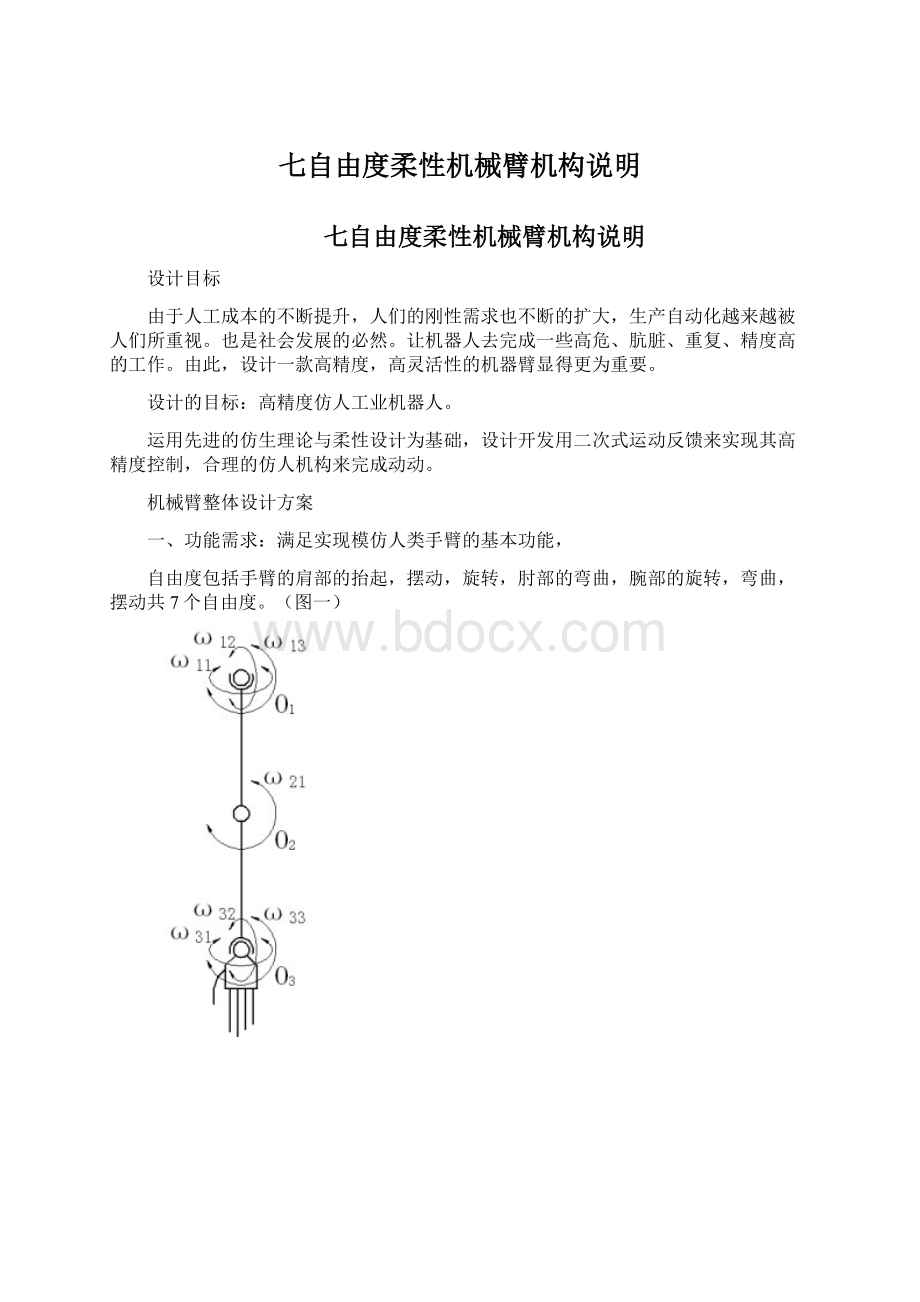
一、功能需求:
满足实现模仿人类手臂的基本功能,
自由度包括手臂的肩部的抬起,摆动,旋转,肘部的弯曲,腕部的旋转,弯曲,摆动共7个自由度。
(图一)
图一图二
二、优化后确定的构型:
自由度包括手臂的肩部的摆动,抬起,大臂旋转,肘部的弯曲,小臂的旋转,腕部的弯曲,摆动共7个自由度。
(图二)
三、驱动模块示意设计:
(图三)
胡克定律是力学基本定律之一。
适用于一切固体材料的弹性定律,它指出:
在弹性限度内,物体的形变跟引起形变的外力成正比。
这样增加了力的反馈测量。
在弹性材料在弹性限度内形变时,测得其形变量,从而计算出受力与关节下方所处的位置。
1.先进行测试
图三
四、机械臂的具体设计方案,(图四)
五、各关节的受力分析:
基本尺寸图(图五)
图五
L1=426mm,L2=293mm,L3=108mm,L4=442mm。
六、马达的初选
谐波减速器的优点:
Harmonic减速器结构简单,体积小,重量轻、啮合的齿数多、承载能力大、运动精度高、运动平稳、间隙可以调整、传动效率高、同轴性好、可实现向密闭空间传递运动及动力。
瑞士Maxon电机优点:
轴向窜动和径向跳动小、温度范围大、回差小等,并且电机型号全编码器与抱闸与控制器配套全面。
瑞士Maxon电机与日本Harmonic谐波减速器选型需求
示例图片:
图六
马达1:
EC90flat90W扭力:
4.67nm0.387nm;转速:
3190rpm;重量:
648g
减速器1:
CSG-25-160减速比:
1:
160;最大扭力:
314nm;正常:
176nm;重量:
420g
马达2:
EC-4polemax30200W扭力:
3.18nm0.112nm;转速:
17000rpm;重量:
300g
减速器2:
CSG-25-160减速比:
1:
160;最大扭力:
314nm;正常:
176nm;重量:
420g
马达3:
ECmax40170W扭力:
;转速:
9840rpm;重量:
580g
减速器3:
CSG-17-120减速比:
1:
120;扭力最大:
112nm;正常:
70nm;重量:
150g
马达4:
EC45flat70W扭力:
;转速:
4840rpm;重量:
110g
减速器4:
CSG-20-160减速比:
1:
160;最大扭力:
191nm;正常:
120nm;重量:
280g
马达5:
EC-4polemax30100W扭力:
1.24nm0.063nm;转速:
17800rpm;重量:
210g
减速器5:
CSDSHD-17-100减速比:
1:
100;最大扭力:
71nm;正常:
37nm;重量:
100g
马达6:
EC45flat70W扭力:
0.13nm0.17nm;转速:
4840rpm重量:
110g
减速器6:
CSF-11-100减速比:
1:
100;最大扭力:
25nm;正常:
11nm;重量:
50g
马达7:
EC-4polemax30100W扭力:
1.24nm0.063nm;转速:
17800rpm;重量:
210g
减速器7:
CSF-11-100最大扭力:
25nm;正常:
11nm;重量:
50g
说明:
EC45flat70W要更换为EC-I4070W+MR
七、受力分析:
有效扭力计算公式:
(堵转-连续)*0.3+连续
质量分配:
设大臂小臂均为,外径D=110mm,假设主体为外壁壁厚为L=5mm的铝壳,长度为H=250mm,
则体积为:
412cm3,铝的密度2.7g/cm3,外壳质量为1.1kg
大臂部分质量有马达3(580g)减速器(150g),外壳(1.1kg);小臂部分有马达4567(110g,210g,110g,210g),减速器4567(280g,100g,50g,50g),外壳(1.1kg);
手部主要是灵巧手的质量设为1kg;外加假设载荷6kg。
质量分配示意图如:
图七
图七图五
则可得G1=0.58+0.15+1.1=1.83kg;
G2=(0.11+0.21+0.11+0.21)+(0.28+0.1+0.05+0.05)+1.1=2.22kg
G3=1+6=7kg
则大臂最大转动惯量大臂M1=g*G1*L4/2=9.8*1.83*0.442/2=3.96nm
小臂M2=g*G2*L2/2=9.8*2.22*0.293/2=3.19nm
手M3=g*G3*L3=9.8*7*0.108=7.55nm
总惯量为大臂处M1总=M1+g*G2*(L2/2+L4)+g*G3*(L3+L2+L4)
=3.96+9.8*2.22*(0.293/2+0.442)+9.8*7*(0.108+0.293+0.442)
=3.96+12.8+57.83
=74.59nm
小臂处M2总=M2+g*G3*(L3+L2)=3.19+9.8*7*(0.108+0.293)=30.70nm
八、马达型号确认:
马达1:
扭力:
4.67nm0.387nm,减速比:
1:
160,最大扭力:
314nm;正常:
176nm;
则扭矩为,747nm,61.92nm包含M1总的74.59nm
马达2:
扭力:
3.18nm0.112nm;减速比:
1:
160最大扭力:
314nm;正常:
176nm;
则扭矩为,190.8nm,17.92nm包含M1总的74.59nm
马达3:
扭力:
;减速比:
1:
120;最大扭力:
112nm;正常:
70nm;
则扭矩为,319.2nm,19.2nm包含M2总30.70nm
马达4:
扭力:
;减速比:
1:
160;最大扭力:
191nm;正常:
120nm;
则扭矩为,131.2nm,20.8nm包含M2总30.70nm
马达5:
扭力:
1.24nm0.063nm;减速比:
1:
100;最大扭力:
71nm;正常:
37nm;
则扭矩为,124nm,6.3nm包含M3,7.55nm
马达6:
扭力:
;减速比:
1:
100;最大扭力:
25nm;正常:
11nm;
则扭矩为,82nm,13nm大于M3,7.55nm
马达7:
扭力:
1.24nm0.063nm;减速比:
1:
100;最大扭力:
25nm;正常:
11nm;
则扭矩为,124nm,6.3nm包含M3,7.55nm
结论:
马达参数没有异常。
马达报价:
马达一EC90flat90W+HEDL5540公开单价5982rmbCSG-25-160-2A-GR公开单价13246rmb
马达二EC-4polemax30200W+MR公开单价7372rmbCSG-25-160-2A-GR公开单价13246rmb
马达三EC40170W+HEDL5540公开单价6259rmbCSG-17-120-2A-R公开单价9238RMB
马达四EC45flat70W(最好用EC-I4070W+MR)公开单价4302rmbCSG-20-160-2A-GR公开单价11019rmb
马达五EC40170W+HEDL5540公开单价6259rmbCSDSHD-17-100-2A-R公开单价8393RMB
马达六EC45flat70W(最好用EC-I4070W+MR)公开单价4302rmbCSF-11-100-2A-R公开单价5308RMB
马达七EC-4polemax30100W+MR公开单价6587rmbCSF-11-100-2A-R公开单价5308rmb
电机是1-4台的价格,大概有7个点幅度,谐波需要和日本确认后,日本才能给我们正式offer,我给你的价格是我别的项目时价格,作为参考,一般有10个点的浮动
如果电单套数量5台,公开价还要低
Harmonic
九、各运动角度计算:
序号
名称
角度大小α
角度范围β
备注
①
肩关节旋转
180°<α1<225°
β1=-135°~90°
外向内
②
肩关节上下
90°<α2<120°
β2=-90°~15°
前向后
③
上臂旋转
120°<α3<150°
β3=90°~270°
外向内
④
肘关节
120°<α4<150°
β4=0°~150°
前向后
⑤
小臂旋转
90°<α5<120°
β5=0°~150°
外向内
⑥
腕关节上下
90°<α6<120°
β6=-90°~45°
前向后
⑦
腕关节左右
40°<α7<90°
β7=-30°~30°
上向下
十、结构模型说明
1,关节一2,关节一弹性材料3,关节二四连杆,4,关节二连杆5,大臂6,大臂转动关节7,关节四弹性材料8,关节五9关节六弹性材料10,关节六连杆11,关节七12,关节七弹性材料
整体图
与身体连接法兰
轴承固定零件
柔性材料腔体
抬大臂活动连杆
柔性材料驱动
抬臂柔性材料腔体
大臂外铝支架
大臂下轴承固定零件
手腕连杆
手腕万向节
Csd-25-160谐波减速器
2.三自由度平台
3.先做一个刚性的测试平台(零件、两个方案、电机驱动、2.15号测试平台方案)
4.结构发给老师(动力分析建模)
5.提供弹性系数、负载、
6.整个机构的零件质量(动量)与尺寸(力臂)提供模型给···
7.电机、减速机、编码器
8.方案细化
9.节前去采购电机maxon,(编码盘)增量式两套。
10.成本核算-蔡
11.外观设计2月15号之前完成
12.外观设计完成后(2月15号左右)再讨论一次


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 自由度 柔性 机械 机构 说明
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 广东省普通高中学业水平考试数学科考试大纲Word文档下载推荐.docx
广东省普通高中学业水平考试数学科考试大纲Word文档下载推荐.docx
-
计算题测试文档格式.docx
-
会计年终总结范文精选10篇Word文件下载.docx
-
基坑支护及降排水方案Word格式文档下载.docx
-
古代诗歌鉴赏一剪梅学案Word文档格式.docx
-
国标舞考级Word文件下载.docx
-
机电工程质量验收规范是什么Word文档下载推荐.docx
-
技术员工作自我评价文档格式.docx
-
交警支队车棚改造工程施工合同文档格式.docx
-
护士变更注册申请审核表与示范文本Word文档下载推荐.docx
-
最新学校新冠肺炎疫情防控应急预案Word文件下载.docx
-
GB50204钢筋规范之欧阳总创编Word格式文档下载.docx
-
《半期整改措施》Word格式.docx
-
诊断 症状学腰背痛关节痛汇总.docx
-
英美文学欣赏The Analysis of Shelleys Ode to the West Wind.docx
-
增值税营改增所得税消费税车购税测试题.docx
-
整理二级建造师管理真题.docx
-
英语三级重点高频词汇导入背单词APP使用.docx
-
浙教版学年九年级数学上册第2章测试题及答案.docx
-
证件照教学设计方案.docx
-
优品课件之《从锁国走向开国的日本》教案.docx
-
整理北京交通大学万用表组装实验报告.docx
-
质量管理计划.docx
-
有机化学鉴别.docx
-
整理照明灯饰灯具行业分类英语词汇.docx
-
濉溪县城市总体规划公示.docx
-
智能化工程质量验收记录表.docx
-
学生会纪检部工作总结.docx
-
幼儿园保教主任发言稿.docx
-
跆拳道协会工作总结.docx
-
中国茶叶店连锁市场竞争分析与竞争战略研究报告.docx
-
学宪法讲宪法主题演讲稿800字精选5篇弘扬宪法精神演讲稿5篇.docx
-
发展社会学课件综合版汇总Word文件下载.docx
-
人教版小学语文六年级下册课文内容复习要点修改版Word下载.docx
-
房地产业主感谢信Word文档格式.docx
-
土地整理初步验收报告Word格式.docx
-
山东省青岛市中考生物试题Word文档下载推荐.docx
-
人教版一年级数学下册填空题汇总40Word格式文档下载.docx
-
完美升级版某国家文化创意产业基地项目研究建议书Word下载.docx
-
分享国内十大品牌连锁餐饮企业的经营方法和经验Word文件下载.docx
-
文化节活动方案4篇Word文档下载推荐.docx
-
佛诗精华录Word下载.docx
-
高中政治必修一《经济生活》知识点归纳Word文档格式.docx
-
五年级数学上第六单元新的119Word文档格式.docx
-
福建省普通高三物理质检卷含答案Word版Word格式文档下载.docx
-
物业应急处理手册Word文件下载.docx
-
武侯区政府投资信息化建设项目管理Word格式.docx
-
地理学习资料文档格式.docx
-
高二英语暑期系统复习2Robots附解析Word文档下载推荐.docx
-
高考试自选模块测试试题浙江卷Word格式文档下载.docx
-
工资集体协商要约书Word格式文档下载.docx
