 电力电子建模与控制仿真作业.docx
电力电子建模与控制仿真作业.docx
- 文档编号:4812493
- 上传时间:2022-12-09
- 格式:DOCX
- 页数:13
- 大小:108.45KB
电力电子建模与控制仿真作业.docx
《电力电子建模与控制仿真作业.docx》由会员分享,可在线阅读,更多相关《电力电子建模与控制仿真作业.docx(13页珍藏版)》请在冰豆网上搜索。
电力电子建模与控制仿真作业
电力电子建模与控制
基于BUCK变换器反馈控制设计
专业:
电气工程
姓名:
荏
学号:
13S053072
BUCK变换器反馈控制设计
第一部分:
设计目标
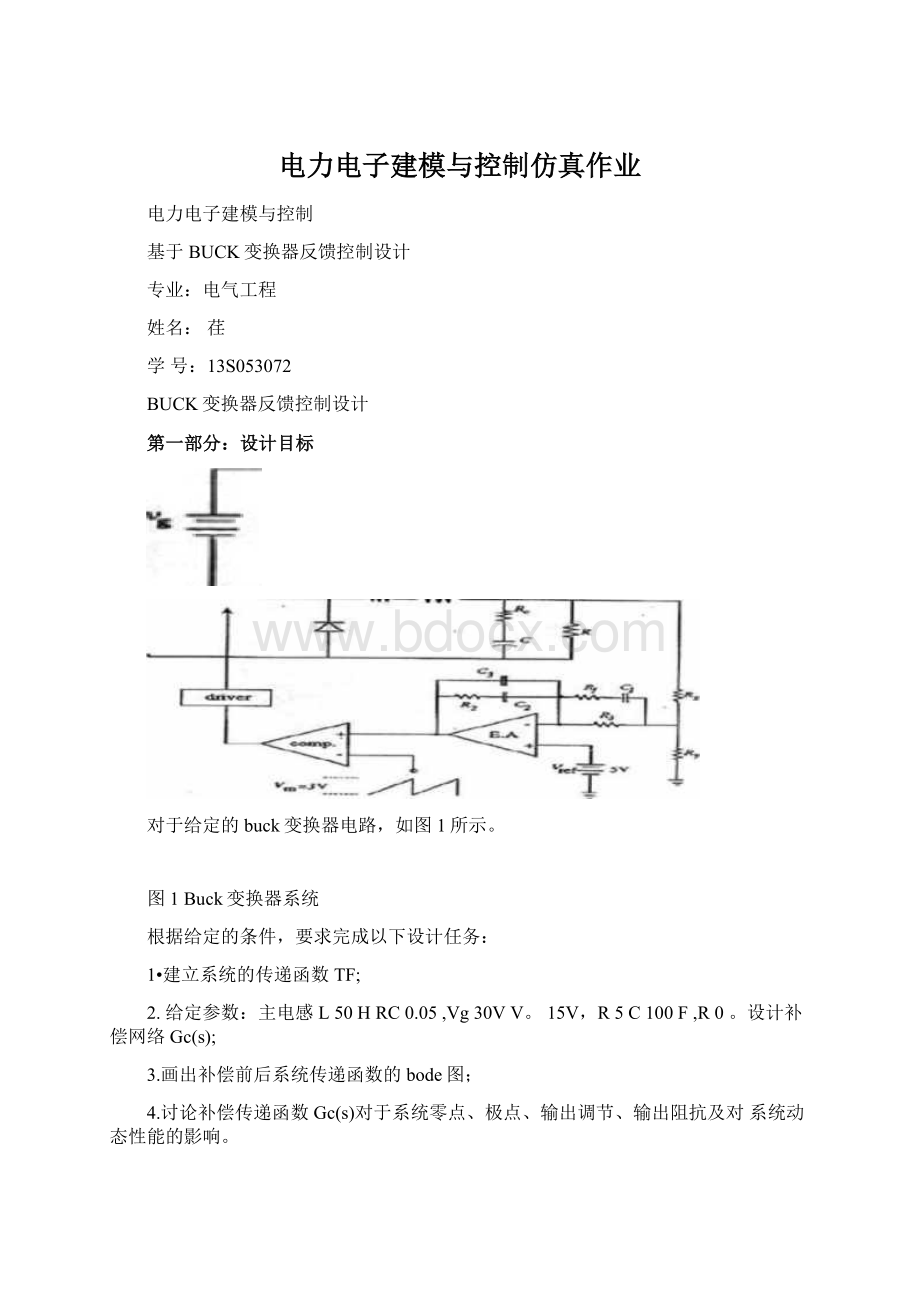
对于给定的buck变换器电路,如图1所示。
图1Buck变换器系统
根据给定的条件,要求完成以下设计任务:
1•建立系统的传递函数TF;
2.给定参数:
主电感L50HRC0.05,Vg30VV。
15V,R5C100F,R0。
设计补偿网络Gc(s);
3.画出补偿前后系统传递函数的bode图;
4.讨论补偿传递函数Gc(s)对于系统零点、极点、输出调节、输出阻抗及对系统动态性能的影响。
第二部分:
传递函数的建立与仿真
、系统开环传递函数建立:
|«|
图2统一电路模型
表1BUCK变换器统一电路模型参数
CgnwTW
C,
i)
1.BUCK变换器占空比至输出传递函数Gvd(s):
由以上模型和参数课求得占空比至输出的传递函数Gvd(s):
Vg(RsRcRC)
Gvd(s)R(LRcRC)sLC(RRc)s2
(1)
2.主拓扑参数选择:
本文控制系统中反馈电阻选择:
RX1bbk,Ry1bbk,即反馈系数
1
H(s)孑开关频率为fs1bbkHz,参考电压为5V,锯齿波幅值3V。
3.工作方式:
根据BUCK变换器电流连续与断续状态的临界电感公式为
1crit
1D?
VgD2Ts
2L
D?
代入给定的参数值,可知,
电感电流
IIcrit,电路工作在连续CCM模式。
二、补偿前系统传递函数
bode图
1•原始回路增益函数G0(s)
Gb(s)H(s)G.(s)Gvd(s)
Vg(RsRRC
&RVm1s(RFCRCs2LC(RR)
(3)
代入相应数值后
1001
1001OO3
2.补偿前系统传递函数
Gb(s)
5
30(52.510s)
57.5105s25.25109s2
bode图
52.5105s
11.5105s5.05109s2
利用Matlab软件画出Gb(s)的bode图,如图3所示,从图中可以看出,系
统的幅值裕度无穷大,然而,相角裕度比价小,只有Pm=15.7deg不符合系统的
要求。
3txJeD购idTH
Gm=InfPm=157deg(at346e104rad*sj
§p-SH亠
图3补偿前系统开环系统bode图
三、系统时域内实时仿真
利用matlab/Simulink中相关的模块,搭建开环实时仿真电路图
,如图
4所示:
□Ucret曰
Tm=Le-[J75.
Fl
p=i阻Tgiii
Pul笙
GsH&alSf
+30V
Mosfet
亠.
——
E十
S[
D
4
RL
VM
图4BUCK主电路实时仿真图对应的仿真波形图如图5所示:
从仿真波形中可以看出,系统的动态特性较差,存在较大的输出超越量和较长的调节时间,稳态时,输出结果并非精确的15V,故存在较大的稳态误差。
通常选择相位裕度在45度左右,增益裕度在10dB左右,因此需要加入补偿网络Gc(s),
图中黑色线条代表输出电压波形,紫红色代表流过电感的电流波形,黄色为
矩形波发生器波形。
取其中一小段观察,如图6所示:
图6稳态时系统波形图
第三部分:
补偿网络的设计
一、补偿器传递函数
图1中所示的补偿器网络为一种有源超前--滞后补偿网络,其传递函数为
匚(訂価恃)
■™■—
ilO()〃(R、+点)
(1+s?
?
2G)[1+*(R]+尺、)Cjj
[州(c,++尤t*g3
有源趙审J二滞后补fS网培二右两个零点,二个极点.
零点为:
Alh知2乙G人=驾"咅(&:
比)-东屆
根点为:
A,M碧=0.为虞乩厶=¥=2聞二"厂書二—kTcTq
2n
■^^sass^•
一工靠
a.A
这里R3R1,C2C1。
二、补偿器设计方法
1.采用推荐公式fgfs/5
即fg20kHz,fs为BUCK变换器的开关频率,一般说来,补偿后的回路函
数fg越大,变换器的动态速度越快。
从bode图中可以看出,原始回路函数G0(s)有两个相近的极点,极点的频率
为fp1,p21/(2JlC)2.25103Hz,可将补偿网络GJs)两个零点设计为原始回
1
103Hz。
原
Rc引起
路函数Go(s)两个相近的极点频率的1/2,即fz1fz2^fpw1.2始回路函数Go(s)有一个零点,这是由于输出滤波电容的等效串联电阻
的,此时可用补偿网络的极点来补偿,令Gc(s)的极点f
p2"ZESR5
fp310fs
2.零极点确定
两个零点:
fzif
z2
£fp1,p21.2103Hz;
三个极点:
fpi0,
P1
fp2fZESR32kHz,fp310fp122.5kHz。
3.补偿网络Gc(s)参数求取
Gc(s)的表达式为:
(11.3104s)2
cks:
15106s)(17106s)
(5)
其中kRi(CiC2)。
原始回路函数G0(s)在fg的增益为:
Go(j2fg)
11.2105
52.5105j2fgj2fg5.0510-9(j2
fg)2
0.075
补偿网络Gc(s)在fg的增益为:
Gc(j2fg)
13.3
零点fzl、fz2处的增益为:
AV
fz2
极点fp2的增益为:
Go(j2fg)
Gc(j2fg)-^200^133
M闕20荷
0.8
fp2
fg
求取补偿网络电路各元件的参数:
AV2
Rl
R3
Gc(j2fg
32^0313.3
201c3
21.3
假设R210k
,可得
R3
R2
AV2
470
2fz1R2
0.013F
C3
—1—0.01F
2fp2R3
C2
—1—707pF
2fp3R2
R1
1
2fz2C3
13.3k
4.补偿网络Gc(s)的bode图
52
58001.58s9.810s
一,、5800(11.3104s)2
Gc(s)
.J
1■!
I=
L-lJ
s(15106s)(17106s)s1.2105s23.510"1s3
对应的bode图:
'七一-
图7补偿网络Gc(s)的bode图
第四部分:
补偿后系统性能分析
一、补偿后系统的bode图
1.补偿后系统传递函数为
G(s)Gc(s)G0(s)
2.补偿后系统的bode图:
rt.~-rIMj"Tin
討「■Kb..4i・蚯gWj:
业•
•■:
I•••亠十-I.F":
-■■_11J^11111111111_
VI
"一-■■-
屜可环山*1
图8补偿后系统的bode图
此时从图中可以看出,系统的相位裕度为50.3度,幅值裕度足够大,能很
好地满足系统的稳定性和快速响应性要求。
二、补偿后系统实时仿真
1.补偿后时域内BUCK变换器仿真图
Discrete,Ffi-E
Plnstet
尺■士曷jhial
-0
——
S-aq-JT□&
1499|
Cont叶
1>单|打
Dophyl
图9补偿后时域内
BUCK变换器仿真图
2.补偿后时域内BUCK动态波形图
3U
2S
20
15
10
CJ
0[171Qiim?
ODD3002anzBamtoqotnone盯陌oni
图10补偿后时域内BUCK动态波形图
图10表明了系统的动态性能得到了改善,响应速度和稳态精度有很大程度上的提高。
3.局部图
选取0.0059s~0.0060s时间内局部波形图进行分析。
15.02
15
HJHh
:
-3屮・■■
T
.J■'・J■
lib
..Lil.
:
J
1..L.1….1
If
JT
1
11
a?
9.2?
9.岀3.263.20S3±32朋43.3E536
-3Tirr#on#i:
'UixlO
图11局部图
纹波大约为0.06V左右,系统的稳态精度较好。
第五部分:
总结
本文通过对BUCK变换器的建模与仿真,运用反馈补偿控制知识,最终完成了一套控制补偿网络的设计,仿真结果也较好的验证了设计的正确性:
由开环系统的响应时间长,稳态精度差,超调量过大等缺点,经过补偿环节的设计之后,较好地解决了这些问题。
当然补偿设计也不是唯一的,设计过程中运用过了相关经验公式,并简化了一些条件,最终形成的结果也肯定不是最佳的。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 电力 电子 建模 控制 仿真 作业
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 如何打造酒店企业文化2刘田江doc.docx
如何打造酒店企业文化2刘田江doc.docx
-
律师提供著作权法律服务业务操作指引.docx
-
18秋福建师范大学《经济法》在线作业一.docx
-
施工现场危险源.docx
-
山东省潍坊市昌乐县学年七年级地理下学期期中学业质量评估试题.docx
-
新视野大学英语视听说教程第二版第一册完整答案.docx
-
精校版重庆市 初中毕业水平暨高中招生考试中考英语试题AB卷Word版含答案解析.docx
-
新视野大学英语视听说教程第二版第一册完整答案.docx
-
江苏省刘国钧中学1112学年高二语文上学期期末考前辅导试题卷苏教版会员独享.docx
-
山东省潍坊市昌乐县学年七年级地理下学期期中学业质量评估试题.docx
-
西安交通大学18年课程考试《管理会计》作业考核试题.docx
-
施工安全保证体系.docx
-
南开17秋学期《科学启蒙尔雅》在线作业2.docx
-
秋福师《大学英语1》在线作业二.docx
-
231695 北交《运输物流管理》在线作业2 15秋答案.docx
-
梁原学区安全管理工作实施方案.docx
-
环保管理台帐明细.docx
-
我国三大翻译证书考试概览.docx
-
东大17秋学期《大学英语二》在线作业31.docx
-
静态分析指标.docx
-
山东金瀚控股金瀚置业绩效考核指标库.docx
-
B0301A国际贸易.docx
-
人教版八年级数学上册同步练习试题及答案第11章《三角形》 同步练习及答案111.docx
-
秋福师《概率论》在线作业二.docx
-
17秋福师《高级英语阅读二》在线作业一.docx
-
西南大学17秋0764《工程建设监理》在线作业参考资料.docx
-
生活宝典之社会大转盘一.docx
-
专卖店管理.docx
-
100个CFO的八年之资金管理篇.docx
-
东北师范古代汉语三16秋在线作业2.docx
-
专业技术人员公共危机管理考试.docx
-
东大17秋学期《大学英语二》在线作业31.docx
-
精作互联网+教育机构中介手机APP项目创业计划书.docx
-
酒店智能卡锁管理系统使用说明书.docx
-
考后动员及稳态知识.docx
-
空调安装工程的施工方案设计.docx
-
劳动合同适用全日制单位.docx
-
理综试题珠海市高三综合测试试题二.docx
-
炼油基础知识.docx
-
领导后进生会议上的讲话稿.docx
-
龙津街道食品安全示范街道创建工作任务分解表模板.docx
-
律师经验的金玉良言.docx
-
煤石油天然气的综合应用教案.docx
-
民事再审申请书格式.docx
-
某市局法警住宅楼工程4#6#各两幢施工组织设计.docx
-
内分泌主治医师考试.docx
-
牛津重点高中英语模块五单词.docx
-
皮带运输机安全操作规程范文.docx
-
七年级英语下册教材听力录音及原文译文外研版.docx
-
企业人力资源的项目策划管理.docx
-
蜜柚种植基地新建项目可行性研究报告.docx
