 现代控制理论习题集.docx
现代控制理论习题集.docx
- 文档编号:4598067
- 上传时间:2022-12-07
- 格式:DOCX
- 页数:65
- 大小:313.31KB
现代控制理论习题集.docx
《现代控制理论习题集.docx》由会员分享,可在线阅读,更多相关《现代控制理论习题集.docx(65页珍藏版)》请在冰豆网上搜索。
现代控制理论习题集
现代控制理论
序
为了帮助同学们更好地学习《现代控制理论》这门大学自动化专业的主干基础课程,在王整风老师的指导下,我们共同编写了这木基于刘豹版木教材的习题集,希望能让大家拥有做题不仅仅注重题目答案,更关注解题过程的意识。
本书第一章由张胜编写,第二章由何新礼编写,第三章由刘洋编写,第四章由邢雅琪编写,第五章由孙峰编写,由宋永康和王彦明统稿,在此向王老师和以上同学表示感谢。
由于时间仓促,木习题集难免有不当之处,个别题目的解法并不唯一,解题过程难免有错误、疏漏的地方,恳请大家批评指正。
编者
2013年6月
第一章控制系统的状态空间表达式1
第二章控制系统状态空间表达式的解13
第三章线性控制系统的能控性和观性21
第四章稳定性与李亚普诺夫方法33
第五章线性定常系统综合38
第一章控制系统的状态空间表达式
张胜
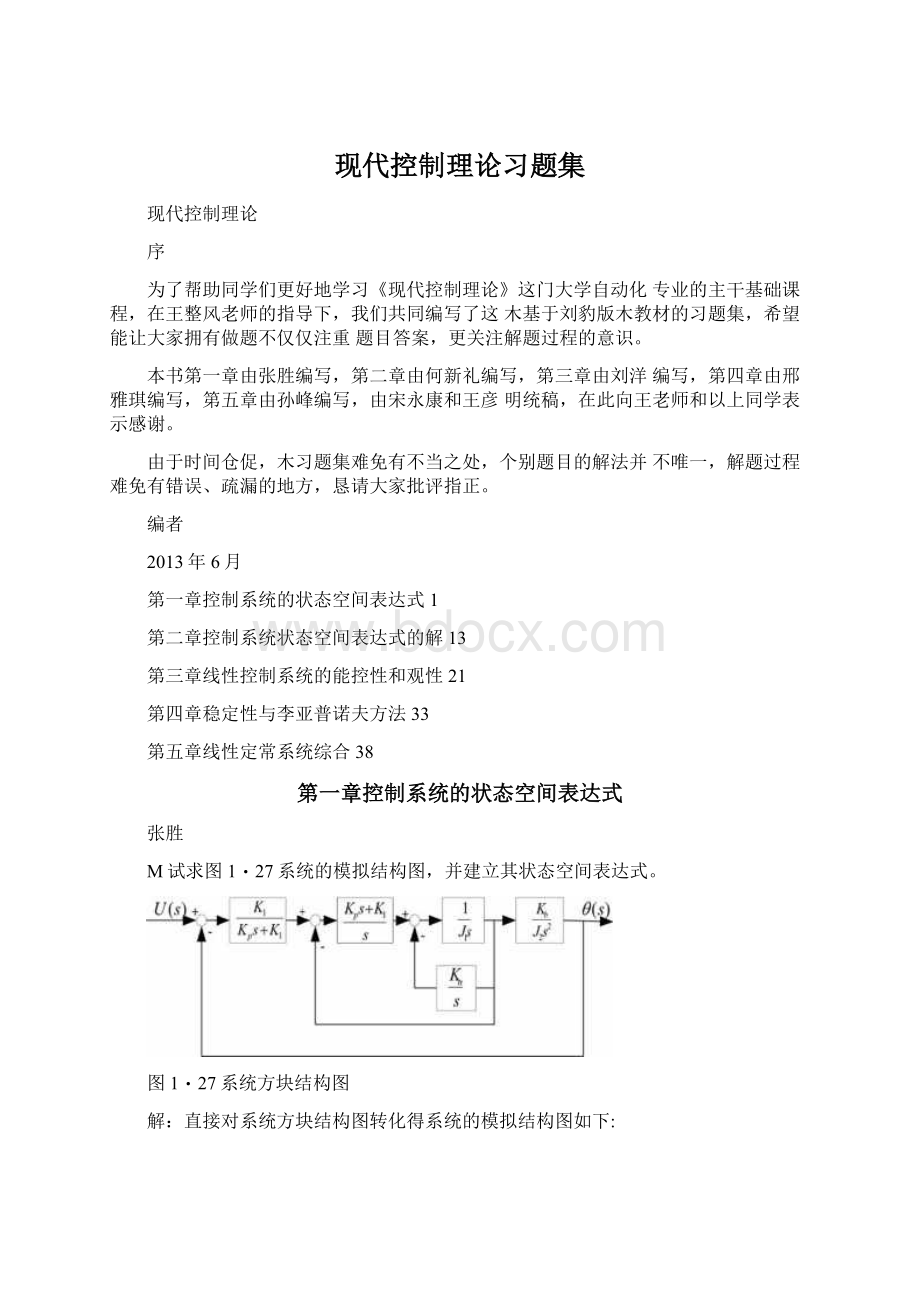
M试求图1・27系统的模拟结构图,并建立其状态空间表达式。
图1・27系统方块结构图
解:
直接对系统方块结构图转化得系统的模拟结构图如下:
可得系统的状态方程:
K:
瓦1一p
_厂十严十丁
丿1丿I°I
*5=—KqX、+K、X&
o/i
令0(s)=y9则y=x}
故系统的状态空间表达式为:
•
・Q
1
0
0
0
01
0
0
0
0
0
X|
0
•
•厶
0
X2
•
•
0
0
K»
K“飞
1
7
K”
J\
A2
+
0
0
0
0
1
0
0
0
n
•
X
0
0
-K、
0
0
兀5
u
K.
丿5
•
0
0
0
0
Kp
LA」
匕」
y=[l00000兀
1・2有电路如图1・28所示。
以电压u⑴为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻鸟上的电压作为输出量的输出方程。
令A二=X2^llc二些,输岀量尹=
假定流过上的电流向下,对图中的两个回路由KVL得:
7?
內十厶£十兀=u
厶2X2斗R2X2=兀3
坷=帀十5
解得
・&11
11
X3—XiXo
c{C-
y=g
转化成矩阵形式为:
R、
1■
1
0
1
旺
厶
厶
/
O
R、
1
厶1
—
()
■
+
()
O
1
厶2
1
厶
■
兰3_
0
~c
0
--
y=[0R2Ox?
1-4两输入“I,/,两输出)i』2的系统。
其结构模拟图如图1.30所示,试求其状态空间表达式和传递函数阵。
z~
a6
图1・30双输入••双输出系统模拟结构图
解:
令ux-yx前向通道上积分号后的状态变量分别为“I;w2->2前向通
道上积分号后的状态变量分别为勺兰4。
由于系统为四维,两输入,两输出系统,故系统阵A为4X4阶,输入阵B为4X2阶,输出阵C为2X4阶。
山图得,系统的状态空间表达式如下:
0
0
0
>11「10
(si-A)=
ai
-1
山叫八心)=
何求饥荚如专递函数阵。
易得,
00
°«6
£-1
%的
S
-1
0
0
-I
-o
o'
a2
s+a}
0
%
b\
0
-1
0
s
-1
0
0
0
“5(
_0
L
s
-1
0
0
-1
「0
0
"1
0
00_
a2
$+d]
0
%
S
0
0
0
10
-1
0
s
-1
0
0
0
%
°4
0
“2
^)=(s/-AylB=
Wjs)=C(sI-AylB
1-5系统的动态特性山下列微分方程描述
(2)尹+5丁+7丿+3尸=«+3“+2«
列写其相应的状态空间表达式,并画出相应的模拟结构图。
'0
1
0
—ET
X|
K"E
0
0
0
1
+
0
一3
-7
-5
玉_
1
八
u
X3
解:
令£=
y=[231
相应的模拟结构图如下:
1
其中“-y前向通道的积分器后的状态变量分别为
1-6已知系统传递函数:
<2)四(s)=―,
sG+2)(s+3)‘
试求出系统的约旦标准型的实现,并画出相应的模拟结构图。
_101
心“、6(s+l)-4337
解:
W{S)=7=7+——++—
$($+2)(f+3)亠(f+3)~$+3s+2s
山系统的并联型实现中特征根具有重根的情况,可得系统的约旦标准型实现如下:
0
y=-4
10
0
0
u
3
相应的系统模拟结构图如下:
_0
1
0
(3)A=
3
0
2
-12
■
-7
_6
1送求下列矩阵的特征矢量
解:
A的特征方程
127
一2=23+6Z2+lU+6=0免+6
解之得:
人二_1仏》2凡=一3
当入=_1时,由APi=AjPr得
010
Pl!
PlL
302
P21
■
P21
-12-7-6
如
_P^_
解得;必1=°3】=_〃H令^11=1得
P\=4=
A.
解得:
P23=一3〃小必3=3卩3令P】3=1
1
-3
3
当人=一2时’由AA=4用,得
■
0
1
■
0
■■
Pl2
■■
P\2
3
0
2
P12
=-2
P22
-12
■
-7
-6
«■
_”32_
解得:
p22=-2P|2,P$2=-Pl2令P】2二2
得
P产
P22
必2
—
当厶二_3时,APi=AiPr得
'0
I
0一
P门
■■
P\y
3
0
2
P13
=-3
PZ3
-12
-7
一6
P\3
=〃23=
"33
综上,系统的特征矢量为
121
P=-1-4-3
-113
14试求下列状态空间表达式化成约旦标准型(并联分解):
(2)
4
1
-2_
xl
'3
r
1
0
2
+
2
7
1
-1
3
_5
3_
if
解:
易得A的特征方程:
几一4
\aI-A\=-1x
-I1
2
-2=(Z-1)(A-3)2=O
A-3
「41
-2
■4M
Pli
Ai
1
0
2
Pll
=3
P21
1
-1
3
如
如
当2]=3时,由=人£得
解得令Ph=1,得
■
4
1
■
-2
■■
■—
Pll
■■
1
1
0
2
lh\
=3
Pll
1
1
-1
3
■
_Ai_
1
■»■
由于有入=3的重根,由广义特征矢量Ap2=A}p2+P]9得
解得伏2=P12+1,P12=P.2令门2=1
Pn
■■
1
Px
=
1
P31
1
得片二
当入=1时,由AP=入£得
"4
1
-2
pj
1
0
2
如
=
I-1
3
■
用・
■■
/>13
■■
0
卩23
=
2
1
解Z得卩13=0,023二2〃33令门3=1得
x=Ax+Bn
y=Cx
易得
_31O_
4=
030
001
■
0
-1
2_
厂|=
1
1
-2
0
1
-I
110
■B
110
P=
102
T=P=
织02
101
101
故系统阵A的特征矢量
作为转换阵
设变换完成后的约旦标准型形式如下:
_0
-1
2・
「3
1_
-8
-f
咕二
1
1-2
2
7
—
-5
2
0
1
-1
5
3
-3
4
■■
110
■■
120
314
102
011
203
101
「0
-1
2_
■■■
X1
一兀+2兀
x=T~lx=
1
1
-2
£
—
召+工一2不
0
1
-1
兀一兀_
综上,可得系统状态空间表达式约旦标准型为:
-1
-3
1・10已知两个子系统的传递函数阵叱($)和叱($)分别为:
11
咔)=
5+15+2
5+1
心)=
5+35+4
1
0
0
_s+2_
_s+l
试求两个系统吊联连接和并联连接时,系统的传递函数阵,并讨论所得结果。
解:
当系统与串联联接时,系统的传递函数阵:
■1
1]
[1
1]
1
S2+5S+1
IV=WW=
■1
S+3
1
S+4
0
S+l
0
S+2S+l
=
(S+lXS+3)
1
(S+2)(S+3)(S+4)
1
_S+1
S+2」
(S+l)'
(S+l)(S+2)
当系统与I匕并联联接时,系统的传递函数阵:
"1
1・
■1
1
w=w{+w,=
S+l
S+2
+
S+3
S+4
S+l
1
0
0
5+2-
_S+1
Ml已知如下图所示的系统,其中子系统1、2的传递函数阵分别为
1
1
7+2
求系统的闭环传递函数阵。
W』s)=
r*
-1]
■1
-1■
5+1
s
1
0
s+1
s
0
1
0
1
0
1
L
$+2」
5+2.
+
解:
易得系统的闭环传递函数为W=[/+说($)叱($)『叫($)可得
/+叫($)叱($)=
[/+吧(£)炉2(耳『
ri
-1
$+2
-1
I5+1
s
5+1
s
0
1
0
5+3
L
s+2_
-
s+2_
・+3
1_
~s+l
s+1
■
£+2
£
y+2
s(s+3)
0
54-2
a+2
0
■
5+1_
5+3
0
1
$+1
s+3
W(s)=[l+W{(s)叱($)『比(s)=
5+15+1
■■
1-1
'152-l'
$+2s(s+3)
5+1S
5+25(5+2)
aS+2
1
c1
0
S
0
5+3
.s+2-
5+3
第二章控制系统状态空间表达式的解
何新礼
2-1试证明同维方阵A和B,当AB=BA时,"「.丘印二』朋册,而当AB^BA
时,eAt-eBl°
证明:
由
eAt=I+A^—A2t2-^---+—AKtK+---
2!
K!
严二I+B+丄B专+…+丄人⑺+…
2!
K!
可得:
/・严=I+(A+B>+-!
-(A2+B2+2AB)f2+--+-^(AA,+---+BKV+••2!
K!
所以当AB=BA时,
eA!
•幺川=I+(A+B”+-^(A+B)~Z~+---H(A+B)KtKH
2!
•
乂囚为』t=I+(A+B)r++(A+B)2/2+…+A(a+B)S+…
2!
K\
所以只有当AB二BA时严・』=占皿
010
2-3矩阵A=001试用拉氏反变换法求
2-54
解:
状态转移矩阵由下式确定:
叫)=/『=口刼_町*
由于rs一
si-A=0s
-25
0
-1
5-4
其逆矩阵为
(si-A)-'=
-4^+5
2
2s
s-41
52-45S
-55+2s2
2
4-
-2
亠
3
5-1
1
5-2
(-I)?
5
亠
-4
亠
3
5-1
1
5-2
1
(-I),
8
+
-8
+
3
S—15—2(s—1)~
因此%)=/=口刼一町打
eA/=—2ef+2e2t—2tef
-4er+4e1:
-2te
2d—2e2t+3tef—el+e2t—te15”一4e2t+3fe‘一2d+2e2t一te18ef-8“+3fer-3/+4e"f-te
(1)
2-4用三种方法计算以下矩阵指数函数严o
-1
0
方法一:
定义法:
由宀1+加+存八…+护广+…
得:
_io]「0-T
1
'0
7
「21
'0
+
t+—
厂+•・・+_
L。
1」口oj
2!
40
n\
_40
严+…
1-2/2+…
23
一/+—/'+…
3
1一2尸+…
方法二:
拉氏反变换法:
$1_A=
S1
-4s
($1—町*丄:
丁+44
丁+4
4
52+4
-12
亍*+4
52+4
所以经过拉氏反变换得:
cos2/
-—sin2t
]=
2
2sinZ
cos2/
s.
coswt—;sinwtt
厂+
方法三:
变换A为约旦标准型
=2i时,
1=才一4=0解得石=2i,^=-2i
A
特征矢量
可得
P\=
1
-2/
Pl=
"o
-f
Pw
=2/
Pll
4
0_
山®=人"得
当/U=-2/时
'o
-f
Pn
=-2i
P\2
4
0.
丿22・
./?
22_
山細2='得
可得「1]
?
2=W
-I
=
o
-—J•z2
1-21-2
1-2"」2ir—e+—e
22
・-2"・lit
ie-le
・2217
-Ite
1一41一2
”+-2217z>-01-41-2
⑵ri
A=
4
解:
①定义法:
“+亦护尸+卜八…4丹+…
r*
1/+-
■5
■
2
F+丄
"13
7'
Loi」
H1」
2
8
5.
3!
28
13
+…
11'
r*=—
'2i-f
-2/2i
4z
2/1
则变换阵厂=
宀[
4/+4尸+…
t+r+-
(5八
1+/+一厂+・・・
2
②拉氏反变换法
■5-1»r
■5-11
-45-1
4}(F+l)
45-1
(.d-A)=
]_1
4(5-3)4(5+1)
]1
2(—3)+2($+1)
]]
(5I-A)_,=2($-3)2(s+l)
1-1
1
S■35+1
13;1-X
—e——e
44
1/亠1J—e+—e
22
1/亠1小
—c+—c
2*2
③变换A为约旦标准型
解:
令|九-内=0则八1
-1
2-1
=0,B|J(2-l)2-4=0
解得入=3,=-1
当人=3时,特征矢曇?
]=
儿由
J?
21.
_ir
Pll
=3
Pn
41
A/?
!
=勿],得
当几2=J时,特征矢勤2=
P12
卫22.
「1IpJ
=-l
Pn
4life.
J}22.
得
,由他=九〃2
可求
P1
[-J
1
-2d0
1JJ小—e+—e
22
e3t-e
1-e4
1J—L
2
1
1-
'11'
厂]=
2
4
_2-2_
1
1
5
~4_
3/1-/
—_e4
e:
/+-e~r2
2-5下列矩阵是否满足状态转移矩阵的条件,如果满足,试求与之对应的的A阵。
(1)
①(/)=0sinfcost
0一cos/sin/
解:
由于
①(o)=00
0],所以该矩阵不满足状态转移矩阵的条件
1幻
0-1
0
解:
因为叽側,所以该矩阵满足状态转移矩阵的条件
•「011
对计算出的A阵检验其是否满足①W)=A①(小验证过程如下:
1
-2
)Jof
0一2严
=◎(/)
(3)
①(/)=
2广-2八
C-2/
2e-e
解:
因为①(0)=
=1,所以该矩阵满足状态转移矩阵的条件
・-2八+2£切4*加・2厂厂
'02
-e',+2e2t2e~2t-2e~,_
z=0
10
对计算出的A阵检验其是否满足①⑺=加>(小验证过程同
(2)
(4)
①(/)=
(-宀启)
-扌『+疋)
卅+刊
解:
因为①(0)=
工八所以该矩阵不满足状态转移矩阵的条件
2-6求下列状态空间表达式的解:
x=
"0
r
X+
0
0
1
初始状态
y=[10]x
「订,输入u(t)是单位阶跃函数。
40)=:
解:
由心
s-1
0s
(sl-A)1=—
‘由于T;]‘z 「斤以得开(? )=①(/)x(0)+J -r+/+1 =2r+1. y=[16\x=^t2+t+\ 在特定控制作用下,状态方程(2・25)的解、成立。 (2.30)、 2-7试证本章2.3节,式(2.31)、式(2.32) 证明: 已知•d丄口 x=Ax+Bu (1)证式(2.25)的解将方程式改写为;(”(『)=盹)在上式两边左乘严可得严将上式在0到t上积得: 6>-/Ux(r)-x(0)=£e~A'Bu(r\lTy即jv(/)=0吸(°)+[)eA{,~: 'Bu(r)clT (2)证式(2.30)脉冲I啊应: “(/)=k》(/]x(o_)=x。 时, 由状态方程的解为咖=严畑+[严%(杯把/_0带入时有八「\F认)/、 %-0-x(/)=/农(0一)+[/ 把u(t)=肋(/)帶入,得: 曲)=/如)+jy(7躲代m=0%+eAlBk (3)证式(2.31) 阶跃响应: 由状态方程的解为八Mr)/\VI/、 %(/)=/"叭(/())+[eA{,x)Bu(t)dT 把/_0带入时有八川/\俨认)/、 g-0-H/)="t(oJ+[f(加(训丁 W严”討+討〜…” ="九+严[一(A")(□'-1)愀’ =eAtx0+A7[(eA,-l)Bk (4)斜坡响应 由状态方程的解为八Al}/ct,}/、 x(/)=/f,(/())+[eA{,-x)Bu(r\lr % 把/°=o_M)=gi“)带入有 垃)=e"x(0_)+[eA'! ~'}nlt•Bk =eA,x0|I—Ar+gA’z^—…]衣 =eA,x0+A'2\eA,-1-At\Bk =6>-vx0+[A~2(eA,-I)-A~lt\Bk 2-9有系统如图所示,试求离散化的状态空间表达式。 设采样周期分别为T=O.ls和Is,而ul和u2为分段常数。 ul 将图化成模拟结构图 列岀状态方程•; X]=-X|+ku{ x2=xl-u2 y=2x}+x2 • -1 0 k 0 x= _1 0_ x+ .0 _L y=[2ljx 则离散时间状态空间表达式为x(k+1)=G(7>(k)+H(7>(R) y(k)=cx(k)+Du(k) 由 G(T)=eA,^H(T)=^eAl >o' ■-1o' B= 2 _01_ cT= 10. 1 df礪: A= 当T=1时 0k °i=r尸)o -1Jb(r_i+戶)-t x(k+\)= T0 —JJ y(k+l)=[2\]x(k) '严0_ 心)+ ■严) 0


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 现代 控制 理论 习题集
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 转基因粮食的危害资料摘编Word下载.docx
转基因粮食的危害资料摘编Word下载.docx
-
高中英语词组大全Word文档下载推荐.docx
-
卫计局年工作总结及新年工作计划Word格式.docx
-
贵州省煤矿安全管理人员安全资格证A考试概况Word格式.docx
-
系统集成项目招标文件Word文件下载.docx
-
消防设计技术审查的要点Word文档格式.docx
-
第三章 习题课 带电粒子在磁场或复合场中的运动Word格式.docx
-
湖南岳阳中考英语模拟卷含答案Word文档格式.docx
-
电子商务考试题总汇打印版打印打印Word下载.docx
-
选调生考试备考言语理解与表达真题Word文档格式.docx
-
高考物理实验题专练 专练15Word文档格式.docx
-
加装奥迪A4L蓝牙电话功能Word文档下载推荐.docx
-
学年下学期好教育高三月考仿真卷A卷 语文 学生版后附详解Word文档下载推荐.docx
-
净化生产车间工程一般施工技术施工方案Word文档格式.docx
-
内蒙古呼和浩特市第六中学学年高一政治下学期期末考试试题Word下载.docx
-
证券行业客户经理电话营销技巧与实例Word文档下载推荐.docx
-
叶芝 苇间风文档格式.docx
-
最新中美贸易摩擦的原因及解决对策1论文Word文件下载.docx
-
意义的近义词Word格式文档下载.docx
-
上海市中考英语试题S.docx
-
专题12观点论证类设问.docx
-
附加安心重疾条款.docx
-
设计变更管理办法修改意见稿FINAL汇编.docx
-
毕业赠言毕业致词精选多篇.docx
-
银行新员工代表发言稿精选多篇.docx
-
北京市朝阳区届高三第一学期期末语文试题Word版含答案.docx
-
HL线切割使用说明书模板.docx
-
车工实训周记.docx
-
USBHID键盘扫描码.docx
-
Apmpoqu4调研报告.docx
-
最熟悉的陌生人作文八篇.docx
-
被动语态综合讲解.docx
-
4季度中国交通运输行业运行情况分析Word下载.docx
-
10《机电理论》试题Word下载.docx
-
疫情防护企业工作总结Word文件下载.docx
-
园林植物配置技巧Word文档下载推荐.docx
-
《做最好的家长》读后感读后感Word格式.docx
-
7语文中考模拟试题铁一中三模语文word版有答案文档格式.docx
-
26个国家新娘婚纱服饰大比拼Word下载.docx
-
云南省第二次高中毕业生复习统一检测文科综合试Word文档下载推荐.docx
-
53无分别智Word文档下载推荐.docx
-
110指挥中心大楼施工组织设计Word格式文档下载.docx
-
在春训会动员讲话文档格式.docx
-
110kV金谷园智能变电站现场规程试行版Word格式.docx
-
张建机关青年的那些无意识差错Word格式.docx
-
镇江市十二五现代农业发展规划讨论稿Word格式.docx
-
316自查评估工作汇报Word格式.docx
-
ansys120下载地址安装方法和汉化处理Word文档格式.docx
-
DOS命令之批处理注册表Word文档格式.docx
-
浙江卷Word校对版Word文件下载.docx
-
支模架搭设模板安装及拆除安全技术交底文档格式.docx
