 隧道洞内施工控制测量之交叉导线网法.docx
隧道洞内施工控制测量之交叉导线网法.docx
- 文档编号:4521027
- 上传时间:2022-12-01
- 格式:DOCX
- 页数:12
- 大小:20.98KB
隧道洞内施工控制测量之交叉导线网法.docx
《隧道洞内施工控制测量之交叉导线网法.docx》由会员分享,可在线阅读,更多相关《隧道洞内施工控制测量之交叉导线网法.docx(12页珍藏版)》请在冰豆网上搜索。
隧道洞内施工控制测量之交叉导线网法
隧道洞内施工控制测量之交叉
导线网法
隧道洞内施工控制测量之交叉导线网法
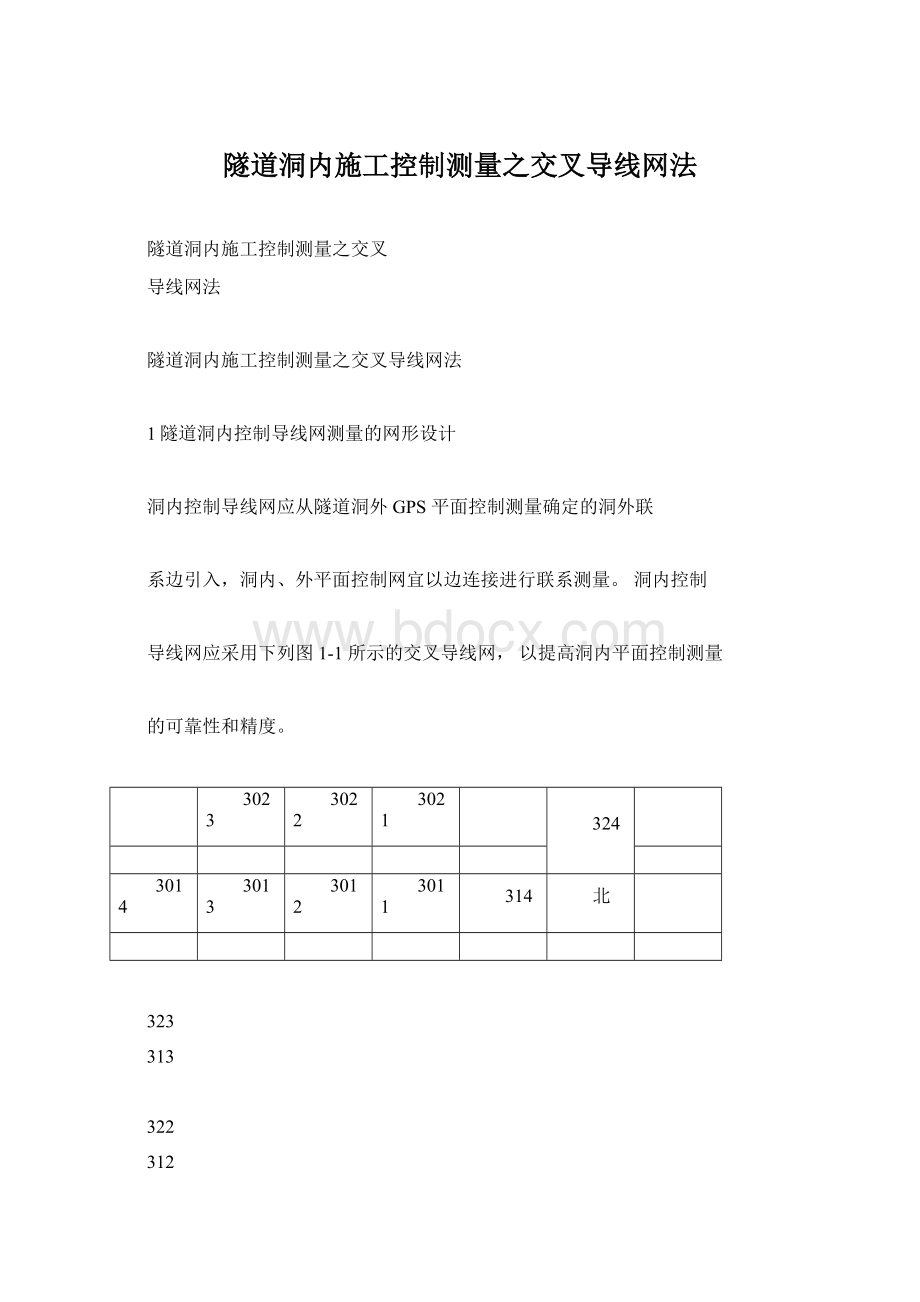
1隧道洞内控制导线网测量的网形设计
洞内控制导线网应从隧道洞外GPS平面控制测量确定的洞外联
系边引入,洞内、外平面控制网宜以边连接进行联系测量。
洞内控制
导线网应采用下列图1-1所示的交叉导线网,以提高洞内平面控制测量
的可靠性和精度。
3023
3022
3021
324
3014
3013
3012
3011
314
北
323
313
322
312
321
GPS29
311
GPS32
图1-1隧道洞内控制导线网测量网形示意图
2导线网的外业数据采集
1〕洞内控制导线网测量的精度要求
根据?
高速铁路工程测量标准?
〔TB10601-2021〕中的有关规定
和要求,结合表1-2所示的隧道施工实际情况,为保证隧道的横向贯
通精度,隧道洞内控制导线网测量的精度等级及主要技术要求,应满
足表1-2的要求。
表1-2洞内导线网测量主要技术要求
测
测相邻
导线
测
距
角点位
方位
回
附合边
全长
中
中坐标
角闭对应数
长度长
相对
误
误中误
合差导线
0.
1
〔k
〔
差差差
闭合
限差等级
5
m〕m〕〔m〔″〔m
差限
〔″〕
″″
300m〕
〕
m〕
差
级
级
1/55±
L
三等46
≤2~
3
000
n
600
46
2<
300
1/55±
三等
L≤7~
000
n
600
1/10
±
隧道46
L>300
3
5
7
~
0
n
二等
600
000
注:
导线网独立闭合环的边数以
4~6条边
为宜。
导线点宜充分利用洞内施工平面控制桩,单独布点时应布设在施
工干扰小、平安稳固、方便设站、便于保存的地方,点间视线应距洞
内设施0.2m以上。
导线网水平角观测宜采用方向观测法,并符合下表
1-3的要求。
表1-3
导线网水平角方向观测法的技术要求
等级
仪器等级
半测回归零差
一测回内2c
同一方向值各测
〔″〕
互差〔″〕
回互差〔″〕
隧道导线
0.5″级仪器
4
8
4
1″级仪器
6
9
6
导线网边长测量应符合下表1-4的要求。
表1-4
导线网边长测量技术要求
使用测距
每边测回数
一测回读
测回间较
往返观测
等级
仪精度等
数较差限
差限值
平距较差
级
往测
返测
值〔mm〕
〔mm〕
限值
隧道导线
Ⅰ
4
4
2
3
2mD
2〕外业测量要求
1、采用徕卡或天宝高精度测量机器人进行导线网施测。
外业测
量采用机载程序伺服马达自动测量并记录,全站仪具体标称精度要求
如表1-5所示;
表1-5导线网测量全站仪标称精度要求
仪器型号测角标称精度〔″〕测距标称精度
TS30
0.6mm+1ppm
TCA2003
1mm+1ppm
TCRP1201+
2、洞内平面施测前和施测期间需对仪器设备进行常规检校和经
常性检校,施测时注意对中、整平、通风和照明工作;
3、联测洞外控制点时至少需后视两个方向,并对边进
行距离复核;
4、导线测量前应对原洞外控制点进行检测,检测较差应符合式
(1〕的要求。
当检测与原测成果较差满足限差要求时方可使用,否那么需重新分析原因,确认是点位位移后,需要重新调整洞外控制点坐标成果。
f限2m1
2
m2
2
〔1〕
式中:
m1、m2——分别为原测、检测的测边或测角中误差。
5、由于洞内交叉导线平差需要进行边长的高程改化,导线测量
时需要同时进行三角高程测量,三角高程测量的精度指标按照五等水
准精度执行,各项限差见表1-6。
光电三角高程测量精度应符合下表1-6的要求。
等
级测回数〔中
表1-6
最大
光电三角高程测量技术要求
竖直角
测回间较差指标差互差
往返观
测高差
边长范
围〔m〕
丝法〕
角值
〔〕
〔〕
较差
〔o〕
〔mm〕
五
2
20
10
10
60D200-600
等
6、用于气象改正的温度、气压数据,在每测站应测定一次,并
在观测手簿上作好相应记录。
气象观测时待气压计、温度计与周围环境一致后测记气象数据,测距边气象改正通过全站仪进行自动进行。
7、为了有效检查洞内导线控制点的稳定性,需每两个月定期对
交叉导线控制网进行复测,复测精度应满足式〔1〕的要求。
如果复
测成果超限,需再次复测,两次复测成果满足要求时导线成果进行更
正。
3〕洞内控制导线网测量方式
洞内控制导线网测量采用交叉导线的形式进行布设,测量时每站
至少观测三个方向点,一般观测四个方向点。
A1A3A5
A2A4A6
图1-2洞内控制测量交叉导线测量示意图
如图1-5所示,置镜A3点,分别观测A1、A2、A5和A6点,然后置镜A4点,分别观测A2、A1、A5和A6点。
水平方向观测时,应选择距离适中、通视良好、成像清晰且垂直角较小的方向作为零方向。
分组观测时,应采用同一零方向。
导线网观测的测回数、水平方向与距离观测值的各项限差,见表
1-3和表1-4中要求。
3导线网的内业数据处理
洞内导线网外业观测和数据质量合格后,应及时进行导线网的内
业数据处理。
导线网的内业数据处理可按照以下方式进行:
1、将导线网的原始观测数据从全站仪中传输至计算机,并进行
备份。
2、利用多测回测角软件对每个测站的2C互差、半测回归零差、垂直角指标差互差和测距较差等精度指标进行检查,对超限的测站及时补测;对测量的导线边长进行加常数、乘常数改正,同时进行高程
改化,将距离改化到隧道工程独立坐标系的投影面上;
3、整理成IN2平差文件格式〔详见附录〕;
4、以隧道洞口稳定的GPS平面控制点为约束点,在隧道工程独立坐标系下按严密平差法进行整网约束平差。
平差后的各项精度指标应满足表1-2所示的要求。
4平差软件
由于导线网可靠性较低,外业数据采集需要谨慎的同时,内业数
据处理及分析更需细致认真。
推荐采用中铁四院?
铁路工程精密控制
测量数据处理系统?
进行常规平差,同时要求采用Helmert约束平差,
比拟两种平差坐标较差,差值在20mm以内比拟正常,假设两种平差
坐标结果相差较大,可能是数据采集有问题。
备注:
中铁四院?
铁路工程精密控制测量数据处理系统?
具有常
规平差和Helmert约束平差功能,同时具有对每个测站的2C互差、
半测回归零差、垂直角指标差互差和测距较差等精度指标进行检核的
功能。
附录平面控制网观测文件〔in2格式文件〕
在进行平差之前,必须要准备好平面观测文件〔取名规那么为“网
名.in2〞〕。
观测文件采用网点数据结构,除包含控制网的所有点、未知点和观测值信息外,还隐含了控制网的拓扑信息。
平面观测文件为标准的ASCⅡ码文件,可以使用任何文本编辑器建立编辑和修改。
其结构如下:
该文件分为两局部:
第一局部为控制网的数据,包括先验的方向观测精度,先验测边精度和点坐标(见文件的Ⅰ局部);第二局部为控制网的测站观测数据(见文件的Ⅱ局部),包括方向、边长、方位角观测值。
为了文件的简洁和统一,我们将边和方位角也放到测站观测数据中,它们和相应的观测边和观测方位角有相同的“观测值类型〞,但其精度值赋“0,〞即权为无穷大。
第一局部的排列顺序为:
第一行为方向中误差,测边固定误差,测边比例误差。
假设为纯测角网,那么测边固定误差和比例误差不起作用;
假设为纯测边网,方向误差也不起作用,这时可输一个默认值“1。
〞程
序始终将第一行的方向中误差值作为单位权中误差。
假设只有一种(或
称为一组)测角、测边精度,那么可不输入精度号。
这时,从第二行开
始为点点号及其坐标值,每一个点数据占一行。
假设有几种测
角测边精度,那么需按精度分组,组数为测角、测边中最多的精度种类
数,每一组占一行,精度号输1、2、...〔参见表2-2〕。
如两种测角
精度,三种测边精度,那么应分成三组。
方向中误差单位为秒,测边固定误差单位为毫米,测边比例误差
单位为ppm。
第一行的三个值都必须赋值,对于纯测角网,测边的
固定误差和比例误差可输任意两个数值,如5,3;对于纯测边网,方
向中误差赋为。
点点号〔或点名,下同〕为字符型数据,可
以是数字、英文字母〔大小写均可〕、汉字或它们的组合〔测站点,
照准点亦然〕,X、Y坐标以米为单位。
第二局部的排列顺序为:
第一行为测站点点号,从第二行开始为照准点点号,观测值类型,观测值和观测值精度。
每一个有观测值的测站在文件中只能出现一次。
没有设站的点〔如附和导线的定向点〕和未知点〔如前方交会点〕在第二局部不必也不能给出任何虚拟测站信息。
观测值分三种,分别用一个字符〔大小写均可〕表示:
L—表示方向,以度分秒为单位。
S—表示边长,以米为单位。
A—表示方位角,以度分秒为单位。
观测值精度与第一局部中的精度号相对应,假设只有一组观测精度,那么可省略;否那么在观测值精度一栏中须输入与该观测值对应的精度号〔参见表2-2〕。
边长和方位角的精度值一定要输“0〞。
在同测站上的方向和边长观测值按顺时针顺序排
列,边角同测时,边长观测值最好紧放在方向观测值的后面。
如果边长是单向观测,那么只需在一个测站上给出其边长观测值。
假设是对向观测的边,那么按实际观测情况在每一测站上输入相应的边长
观测值,程序将自动对往返边长取平均值并作限差检验和超限提示;
如果用户已将对向边长取平均值,那么可对往返边长均输入其均值,或
第一个边长〔如往测〕输均值,第二个边长输一个负数如“-1〞。
对向
观测边的精度高于单向观测边的精度,但不增加观测值个数。
平面观测文件中的测站顺序可以任意排列,一般来说不会影响平差效率和结果,但本软件包还特意提供了观测值文件排序(网点优化排序)的功能〔详见〕,通过优化排序,既有利于网点近似坐标的推算,也可提高解算容量和速度,但一般对于200个点以上的大网或一些特殊网才有较明显的效果。
图2-1为某一测角网的网图,其相应的平面观测文件*.IN2〞的数据格式见表2-1。
对于有多组测角、测边精度的网,其平面观测文件如表2-2所示。
1
6
3
2
表2-1
5
IN2文
4
件示例
〔仅一
组精度的
情况〕
0.7,3,3
1
2,L,0
2
4,L,0
4
5,L,0
5
6,L,0
6
1,L,0
3
1,L,0
图2-1


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 隧道 施工 控制 测量 交叉 导线
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 广东省普通高中学业水平考试数学科考试大纲Word文档下载推荐.docx
广东省普通高中学业水平考试数学科考试大纲Word文档下载推荐.docx
-
计算题测试文档格式.docx
-
会计年终总结范文精选10篇Word文件下载.docx
-
基坑支护及降排水方案Word格式文档下载.docx
-
古代诗歌鉴赏一剪梅学案Word文档格式.docx
-
国标舞考级Word文件下载.docx
-
机电工程质量验收规范是什么Word文档下载推荐.docx
-
技术员工作自我评价文档格式.docx
-
交警支队车棚改造工程施工合同文档格式.docx
-
护士变更注册申请审核表与示范文本Word文档下载推荐.docx
-
最新学校新冠肺炎疫情防控应急预案Word文件下载.docx
-
GB50204钢筋规范之欧阳总创编Word格式文档下载.docx
-
《半期整改措施》Word格式.docx
-
诊断 症状学腰背痛关节痛汇总.docx
-
英美文学欣赏The Analysis of Shelleys Ode to the West Wind.docx
-
增值税营改增所得税消费税车购税测试题.docx
-
整理二级建造师管理真题.docx
-
英语三级重点高频词汇导入背单词APP使用.docx
-
浙教版学年九年级数学上册第2章测试题及答案.docx
-
证件照教学设计方案.docx
-
优品课件之《从锁国走向开国的日本》教案.docx
-
整理北京交通大学万用表组装实验报告.docx
-
质量管理计划.docx
-
有机化学鉴别.docx
-
整理照明灯饰灯具行业分类英语词汇.docx
-
濉溪县城市总体规划公示.docx
-
智能化工程质量验收记录表.docx
-
学生会纪检部工作总结.docx
-
幼儿园保教主任发言稿.docx
-
跆拳道协会工作总结.docx
-
中国茶叶店连锁市场竞争分析与竞争战略研究报告.docx
-
学宪法讲宪法主题演讲稿800字精选5篇弘扬宪法精神演讲稿5篇.docx
-
铁路轨道复习题及参考答案Word文档下载推荐.docx
-
特色技术应用注意事项文档格式.docx
-
隧道工程施工合同XX专业版Word下载.docx
-
日本语言叶の违いWord文件下载.docx
-
入行论第172173课学习笔记Word格式文档下载.docx
-
四年级上数学第一章易错题工作总结Word文件下载.docx
-
数据库实验四Word文件下载.docx
-
世界经典爱情诗歌十首Word文件下载.docx
-
湖南综合观测基本知识试题大气物理大气探测现代气象观测供参习.docx
-
四年级最新四年级下册部编语文阅读理解技巧 阅读训练策略及练习题含答案Word下载.docx
-
水暖电安装预算识图基础知识规范定额Word文件下载.docx
-
新概念3单词Word文档格式.docx
-
苏教版全册四年级下册分类复习Word下载.docx
-
如何在windows 7中设置L2TP VPNWord文档下载推荐.docx
-
西游记读书笔记250字Word格式.docx
-
励志主持词.docx
-
特产专卖店创业计划书Word格式文档下载.docx
-
苏教版小学语文二年级下册第一单元教案设计带反思Word格式.docx
-
养殖业奶牛场规章制度文档格式.docx
