 睿斯凯设置说明使用说明书样本.docx
睿斯凯设置说明使用说明书样本.docx
- 文档编号:4408424
- 上传时间:2022-12-01
- 格式:DOCX
- 页数:30
- 大小:4.43MB
睿斯凯设置说明使用说明书样本.docx
《睿斯凯设置说明使用说明书样本.docx》由会员分享,可在线阅读,更多相关《睿斯凯设置说明使用说明书样本.docx(30页珍藏版)》请在冰豆网上搜索。
睿斯凯设置说明使用说明书样本
睿思凯X9D设立阐明
但愿这个也兼容PLUS;
由于此控为开源,固件不断更新,设立也有所不同。
请使用者依照固件版本不同,请选取性使用!
!
!
此外此文在整顿中难免有误,请模友们多多指教,最佳将修改后版本上传,以便共享。
1.开控,插上usb ,控tf卡就是一种U盘了,里面有一种文献夹叫sounds
,就是语音文献。
在群共享里有中文语音包下载后把 tf卡里en文献夹覆盖就可以中文发声了。
建议覆盖前 把tf卡里数据备份,万一哪天要恢复。
2.只要支持ppm型号外置高频头全都能兼容,但一定要与其配套接受机一同使用。
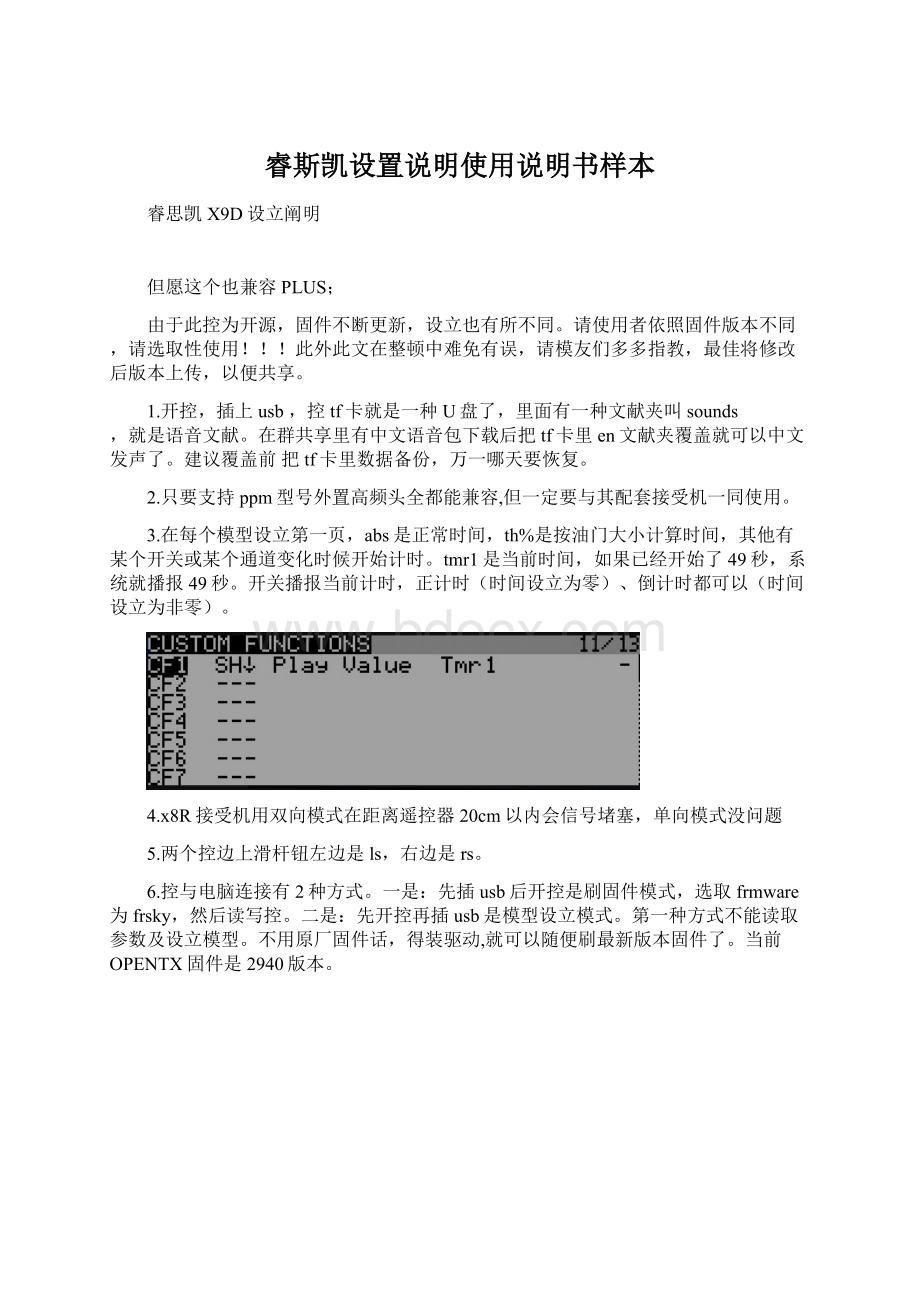
3.在每个模型设立第一页,abs是正常时间,th%是按油门大小计算时间,其他有某个开关或某个通道变化时候开始计时。
tmr1是当前时间,如果已经开始了49秒,系统就播报49秒。
开关播报当前计时,正计时(时间设立为零)、倒计时都可以(时间设立为非零)。
4.x8R接受机用双向模式在距离遥控器20cm以内会信号堵塞,单向模式没问题
5.两个控边上滑杆钮左边是ls,右边是rs。
6.控与电脑连接有2种方式。
一是:
先插usb后开控是刷固件模式,选取frmware为frsky,然后读写控。
二是:
先开控再插usb是模型设立模式。
第一种方式不能读取参数及设立模型。
不用原厂固件话,得装驱动,就可以随便刷最新版本固件了。
当前OPENTX固件是2940版本。
7.舵角正反修改是这里,改成inv就是反向了。
ccpm舵机正反设立可以在第二个页面选取三个混控通道正反向。
如果三个舵机里有一种反了,在这里设立,如果整体混控反了,在这里设立。
下面三个选项是设立混后整体正反向。
8.摇杆曲线就是让摇杆操作更柔顺某些。
看这里比较直观某些,摇杆接近中点时候会顺滑。
9. 是每个模型设立8个状态,可以修改每个状态中点、偏移、舵量等,可以在一种模型设立里放8个不同飞机或8个相似类型飞机,例如两架固定翼,可以用0和1分开设立,飞机A,在装配调试时候副翼中点要偏移一点,但是飞机B不用偏移,设立好后选取0就飞A飞机,选取1就飞B飞机。
0-8就是9套参数,可以给一种飞机定义9套参数,也可以每套参数相应一种飞机。
10.要改手就选取那个 reta aetr ater arte等等。
11.x9d在菜单翻页长按翻页键是倒退。
12.frsky是自己制式。
13.在5通道上设立控制原为sa,三段数据分别为-100,0,100
三轴飞控开关,就改一种选项即可。
14.双向接受机不用接任何设备就可以回传接受机电压,遥控器可以看诸多信息,有三个页面可以自定义显示,每个页面能显示好几种,用过opentx和er9x一模同样,就是增长了写功能。
15.X9D用是opentx修改版。
opentx用就是er9x源码,其实就是在er9x上扩展。
对fs9也可以刷opentx,操作完全同样,但更强大,自定义功能增长了可编程某些。
遥控器关机状态插上usb才干刷固件,开机状态插上usb可以用compainon9x设立遥控器各项功能(很以便)。
16.eepe是设立er9x,companion9x是设立opentx,用法都是同样。
17.阐明书上就一种词 reserved,预留口,当前功能未知,frsky双工合同阐明,用于链接第三方遥测设备,电池接在左边电池口上。
上传这个"FRSKY TELEMETRY PROTOCOL.PDF"文档是 frsky djt和dft外置模块串口数据阐明,可以用来接别遥测设备,可以把此外发射端数据由这个串口输入到遥控器显示。
18.桔子高频头直接可以插在x9d上,fs9也可以直接插,jr高频头可以直接插。
支持dsmx和dsm2合同,可以用便宜dsm2接受机。
19.最底下和横道,就是状态栏数字就是信号,在range test 状态显示大数字,如果是正常模式,救灾屏幕最底下反色横条里是信号强度。
可以把它自定义在显示页面里,有3个自定义页面可以设立。
要看电池电压必要外接电压传感器,也可以自己做。
电池输出并接一种传感器,或者直接在平衡口接传感
20.X9D最高能到16通。
x8r是专门针对最新d16合同模式。
轻型D4R-II,支持1-8通 cppm输出subs。
X9d原配内置一种16通道高频头,外置空,可以再加一种外置高频头构成32通道。
也可以插其他厂家高频模块。
内置和外置高频都可以选取打开或关闭,下图是用DSM2高频头。
也就是可以用JR接受机和DX系列。
21.遥控器上有语音播报,信号差时候或者电压低时候会有语音提示,如果外接传感器,可以播报电池电压、高度、速度、转速、温度……等一切可以监测数据。
有飞行正计时、倒计时播报功能,按油门大小比例计时功能。
对,除了不能直接图传,数据双向传播都是可以实现。
22.电压传感器加一种HUB,可以传回是动力电池总电压和单节锂电池每一节电压,并且你在控上可以设立一下最低单节电池电压报警,低于这个值(例如设立3.7V),那么当3S或6S电池中当任一一节电池电压低于3.7V时,控就报警了。
23.回传是回传,显示是显示。
如果FS刷OPENTX或OPEN9X,用XJT高频头,数据能回传回来,但你如果不另加一种FRSKY外接显示屏,数据是传回来了,但你显示不出来,看不到。
24.按一下ent键对频,再按一下停止
25.
下图是X9D外接高频头引线定义:
26.X9D有一种ppm选项开关,选一下正反向就可以了。
每个模型参数都可以设立单独ppm正反向。
27.用开关设立油门开关:
28.在混控中设立油门开关:
油门是几通道就选SafetyCH(通道数)
29.接受机D8R-II,A2口在侧面,供电和电压数据是插在两个口上,注意看侧面
插错烧接受机。
用proteus模仿这个小电路,输出电压是3.12632。
最大3s
换4种电阻开关电路可以支持3-6s。
3s是三节锂电串联11.1V,6s是6节锂电串联22.2V。
就按这个做,支持3-6s 电压传感器,用开关选取电池类型
30.16通道ppm输出要30几ms才行。
sbus数据,不清晰。
sbus官方没提供数据
d4fr接受机阐明里图,cppm输出18ms,sbus应当更快吧。
18ms是所有通道信号输出一次时间。
这个操作遥控杆 到舵机动作,其中尚有舵机自己延时呢,普通舵机都是200ms,因此遥控器输出怎么都比舵机块十倍。
就是最快锁尾舵机0.09s也要90ms。
因此再快遥控,操作时,舵机都会慢半拍。
因此想打舵时 舵机及时反映,预计当前没也许,遥控->接受->舵机,只有舵机速度能感觉到,遥控和接受机通讯速度人类是感觉不到。
31.高频头有internalRF(内置)ExternalRF(外置)和master/slave三个选项,内外都可以关。
当使用外置高频头时,就把内置高频头关了外置ppm1-8。
32.打开教练开关主控机就会关闭3.5口ppm输入。
33.当前长按menu键,然后按page翻页,翻到最后一页校准,校准办法和模仿器同样,先中立,然后最大化移动遥控杆。
记得校准时别忘了中间和两个边上旋钮一起校准。
校准前记得所有放中位,3个旋钮也同样。
尚有微调也要中位
ls和rs是两个侧边电位器,s1和s2是两个旋钮
第一屏,意思是按enter键开始校准,按一下enter。
第二屏,所有摇杆居中,旋钮和侧边电位器也调到物理居中,不论她显示,然后按enter。
校准时不要太用力,刚好遇到边就可以了,否则拉到头会达不到100%,由于校准时太用力拉过了。
第三屏,依次把所有摇杆和旋钮都最大最小旋转几次,按enter完毕。
最后按exit退出 就校准好了。
34.在遥控器设立第一页里,选取电压范畴
设立好后,继续向下,找到battery low 设立低压报警。
35.这个固件是官方最新
36.対频及距离检测:
bind就是对频:
按一下开始,再按一下停止。
X8r对频时离遥控器远一点,由于双向模式太近时信号会堵塞,对不上,要20cm以上。
range是距离检测:
就是让发射机功率减少到1/30,然后拉距测试,看能拉多少米不失控,然后再乘以30倍就是实际信号范畴。
rssi是信号强度意思。
在正常界面长按遥控器page键,然后用+-号选取,有一种A1值就是rssi,比例表达信号强度 0-99。
接受机内置回传rssi功能,尚有一种rssi输出口,可以输出到第三方设备。
也许是其他可以运用信号强度自动控制飞机东西吧,要是信号低于某个值,可以让飞机自动往会飞。
rssi输出给fpv图传,在地面监控屏上显示信号值。
实时视频数据叠加功能用着。
看rssi输出0-3.3v模仿信号,由外接AD转换成数字比例信号,0-3.3Vad转换哦,各种外接都好用。
rssi输出0-3.3v模仿信号,由外接AD转换成数字比例信号,0-3.3Vad转换哦,各种外接都好用。
37.把模型设立第一页里面最下面master改成slave,然后设立ppm通道数就可以玩模仿了。
玩时候把intarnalrf和externalrf都关掉,这样内外高频头都不工作,既省电又延长高频头寿命。
短按menu 就浮现模型选取页面,然后按一下page 到了单个模型设立页面最下面。
默认是master,改为slave,这个就是模仿输出口。
Internalrf是内置高频头,externalrf是外置高频头。
trainer是教练口。
遥控器背对自己,左面那个音频口是模仿口,右边是耳机孔。
38.如果是喇叭滴一声就是中点提示,可以关掉,若把4个旋钮设立了中点位提示,摇杆关掉,这样,拧旋钮时候听声音就懂得到中间了
这个里面设立。
RETA12LR 就是八个类比输入,reta是摇杆,12是旋钮,lr是侧边旋钮。
39.
这里设立黄框框是通道输出顺序,1234通道相应aetr。
红框框是设立摇杆顺序。
按照图形所指摇杆设立相应操作名。
这样按照你操作类型选取默认顺序就可以了,后来新建模型顺序都按这个。
例如你是日本手,通道输出为aetr,那么改成美国手,通道输出依然为aetr,摇杆和通道输出自动又相应了,想想是不是很人性化
40.遥控器输出ppm值998-2102,中点为1500,相应比例-100到+100。
998-1500是-100-----0,1500-2102是0-----100。
41.内外高频头能同步用,尚有可以把模仿口外接一种,同步3个高频头一起用。
42.混控设立:
把这两个ele +改成- -改成+,就改ele,其他不改。
就改箭头那个,别改其他。
不能设立通道反向,由于是混控,通道反向,整体反。
不要管绿箭头那里显示。
那是随便起名字。
红框是输出通道,黄框是摇杆名称,意思就是用什么摇杆控制输出给什么通道
43.大小舵角设立:
这个选项可以让舵量达到+-125%。
大小舵角也可在servos里设立
44.外置高频头双向tx接入x9d第5脚就是第三方收发如果带双向功能。
45.X9D中FLIGHTMODES中FM0-FM8RETA 0.0 0.0后两个0.0是渐进、渐出,就是推迟和延后意思。
直观体现时,拨动转换开关后,延迟时间缓慢动作一种效果,例如起落架缓缓落下像真效果更高。
这个是IN就是输入延时,
这个是OUT就是输出延时。
46.模型设立第9页,及9/13globalVARIABLES贴切解释应当叫“全局变量”,可以用来保存某些数值,复杂混控有时能用到。
47.sticks这个页面是设立摇杆expo,不是曲线,expo是让摇杆操作接近中点时候更柔和一点。
CURVES里面是设立曲线,设立好在单独通道混控里调用。
48.flight mode中微调,最大用处,在于一路摇杆操作同步各种通道输出,如果不用flight mode给摇杆微调,就得把每个通道都微调一次,很麻烦呀,用摇杆微调或flight mode中微调,一次就搞定了。
例如副翼两个通道输出 1通和5通,要有一点偏差,就要在两个通道上都修改中点位置还不一定精确,用flight mode微调副翼摇杆就可以了,很以便。
切换flightmode就跟切换模型差不多。
49.trim分模式搞。
最大用处是glider里面。
起飞模式,巡航模式,热气流模式,降落模式,都也许有不同trim。
50.屏幕个性化设立:
sd卡上有个bmp目录,做一种64*324bit位图,放进去,就可以选取了,也可把中文做到图里。
51.计时器设立:
persistent 是保存时间,关控不清零,persistent打勾,关机时,时间不清零。
minutes call 是每分钟播报
countdown 是倒计时,不选是正计时
TH%,按油门大小计时,
THs,油门开计时,
abs,直接计时,是绝对时间,就是从建立模型开始计时,不手动清零会始终计时。
届时间之后长按ent遥控器就能重新计时,或调用开关重启。
普通可以用来计算遥控器电池使用时长。
52.4通道固定翼设立:
长按menu 第一页最后两个选项,上面是默认通道顺序,改成AETR,下面是摇杆顺序,美国手是mode2,日本手是mode1,然后再运营向导,通道自动就对了。
A-副翼,E-俯仰,T-油门,R方向。
相应通道1,2,3,4。
当摇杆改成reta通道顺序依然是aetr,摇杆改成rtea,通道输出还是aetr。
这是美国手设立,长按menu,第一页按AETR,摇杆控制RTEA。
短按menu进入模型设立,第六页是混控。
然后到模型设立13页里选 simple 4-ch。
53.
这4项是延时,前两个命令延时,后两个是动作延时。
命令延时就是发出命令后要延时一段时间后才起作用(例如扳动开关),动作延时就是舵机动作放缓(例如放起落架)。
54.失控保护设立
把摇杆、开关用手掰到失控时需要量,按一下这个hold,就设立好失控保护了
或者可以精准定义,把hold改成custom 然后按set
就可以每个通道精准定义失控保护量
55.时间清零设立:
设立这样就可以搬动sh进行时间清零了。
56.襟副翼混控设立:
只有副翼,舵机1接副翼通道,舵机2接6通道襟翼。
襟副翼混控就变副翼了,并且又可以是襟翼。
在价格襟翼升降混控就可以实现副翼和鸭翼同步动作,副翼可以做升降舵那样上下。
1通道。
6通道。
sf是开关。
+-50%我觉得比较好,100%太敏捷了。
弄错了,ele 50,ail 还是100
红箭头是摇杆,蓝箭头是开关,两个通道上都要设立开关,这样可以SF打开带俯仰,关闭纯副翼。
6通道要和1通道同样设立,如果两个舵机ail是1+1-,那两个ele都是+或-,如果ail是相似+-,ele就是1+ 1-。
2 1+1-就是一正一负。
依照舵机安装方向+-得自己试。
按-,减到0,接着按-,就负值了。
舵机信号,0是中点,+是一边 -是一边。
ele量也许要依照实际反映增减。
57.X9D是ACCST制式。
58.X8R要D16才行,当前D16只支持X8R,老接受机都用D8。
60个模型数据,一种模型数据一种对码,不需要切换,只需要切换飞机就行了。
每个单独模型参数互相不冲突。
你可以一种飞机选D16,一种飞机选D8,不冲突。
X8R是16通道,D16也就是XJT高频头支持同步对频两个X8R,同步工作,也就是sbus32通道,或者pwm16通道,其实D16是32通道高频头合同。
59.想要spi可以用其他引脚模仿,X9D也是支持。
外置高频头ppm改为spi支持dx4E接口。
不需要改代码,最新固件支持。
DX4E是PPM输出模仿成了串口,XJT也是串口通讯,用第4脚。
其实opentx源码很规范,完全可以自己换主板,依照自己需要,换引脚更多更强mcu,来满足自己需求,功能也可以自己加。
opentx官网上有推荐。
其他diy顾客使用stm32开发板,对opentx代码更进一步理解,然后添加更强大功能。
60.X9D官方sbus解码就是支持futaba和X8Rsbus。
sbus是单线数字信号,就是数据总线,sbus设备靠数字ID区别通道。
因此sbus直接接舵机话,还需要一种针对舵机ID设立器才行。
飞控已经对sbus解码,不需要单独设立器。
普通接受机连飞控要8根信号线,sbus只需要1根线。
61.四轴简朴,复杂工作都由飞控来干,遥控设立最简朴,用模simple4-c,然后添加6段开关就行。
群共享里有6段开关现成文献,
62.内置高频头没有dsm2选项,只有外置高频头选项里才有dsm2,并且x9d要装dsm高频头才可以直接跟DSM接受配套使用。
XJT高频头包括DJT所有功能,但DFT,DJT和XJT支持接受机不同样。
63.x9d如果要換自己做圖片要212*644bit大bmp。
如果不是4bit,保存成4bit就行了。
官网更新了好多飞机图片,可把图片放到SD卡BMP目录里即可。
PS图片可以选取4bit保存。
64.X9D上面那个银色漆么掉了,可以到汽车装潢店买补漆笔修补。
65.舵机分派线是解码sbus信号。
sbus上接sbus舵机时,要有一种单独舵机通道设立器,由于所有sbus舵机都是并连接在一种口上,舵机自己和sbus接口并不懂得哪个舵机分派哪个通道,因此要给每个舵机设立一种固定通道数据,也就是ID,才干使用。
用普通舵机接sbus接口时,必要有sbus数据解码器才可以用。
sbus就是把所有通道数据由一种接口输出,广播型数据输出,因此每个设备必要要设立自己通道。
Sbus特点就是比ppm快。
sbus是一瞬间把所有通道数据发出去,舵机或设备解码指令执行。
ppm是一种通道一种通道方波,用一段时间发出去。
sbus是纯数字化,ppm还属于模仿信号。
因此接一种sbus解码后输出单一通道到舵机,要比ppm解码后输出单一通道到舵机时间快多多。
sbus就是串口啦,无非速度快而已。
66.
先设立自定义开关,当单节电压低于3.7V虚拟开关CS1自动打开
然后在自定义功能里设立,第一条是每30秒播一次总电压(可以不设立)
第二条意思是,当CS1开,就播放声音,这个声音可以自定义
433
67.main frquency 指定主频率
hopping chanels 是跳频选取 三个跳频值, step是自动跳频步长值。
RF Header(ID) 猜想也许是数据包头,通讯握手用
telemetry Mode 是双向模式选取,这上面当前是关闭状态
68.x9d内置是XJT高频头,X9D插外置XJT高频头,直接在控上显示双向。
DJT过时了,买XJT,支持向上兼容DJT。
DFT可以装天地飞上.下图为X9D外接高频头模块。
尚有可以把模仿口外接一种,同步3个高频头一起用。
69.opentx只有一种,但frsky自己打包了一种格式,版本较旧,必要用stsw刷机才行,但是要刷最新版本固件,就要使用zadig更换驱动,用上位机软件。
companion9x 下载最新固件刷机。
70.multpx(multiplex),指是,你当前设立这个参数或者通道信号,是以何种形式叠加到同组信号里去,里面有相加,相乘,或者替代。
71.四轴简朴,复杂工作都由飞控来干,遥控设立最简朴,用模simple4-c,然后添加6段开关就行。
群共享里有6段开关现成文献,导入companion9x看看,直接可以用。
尚有实验设立和功能可以用电脑端模仿,不用老在控上试,电脑上点鼠标,输入数值还是以便某些。
72.重要是别让非开源控把思路给禁锢了,在X9D这个控上所有混控、联动、都得自己设立,也可以自定义编程,能实现特别复杂功能,例如一系列自动动作序列。
固然你必要理解飞机飞行及各个舵面工作原理,这对于初学者有一定难度。
73.熄火开关设立用混控,在失控保护里选取手动设立
把这个勾打上,所有行程就是+-125%了
这里要设立最小量
这里面可以通过推广设定行程.先改成-125,设立失控保护后,回来再改成-100。
当失控保护时就会自动把油门推杆打到最下-125(设定油门失控触发值为-125)。
74.“!
”就是“非”意思。
!
SA-就是“!
”不在SA-状态成立,“!
”在SA-状态就不成立。
!
功能较好,如果不想使用三段,就用!
上,意思是中位和下位成立,上位不成立。
75.SA↑ 、SA- 、SA↓表达当前三段开关三个位置,可以每个位置设立一种功能。
!
SA↑ 就是当SA不在↑位置时,要干事情,也就是在SA-和SA↓随便哪个档位功能都同样。
举个例子, 当前有个三段开关,可是只想设立一种功能,例如放下起落架,第一段放下起落架,第二段收起,可是到了第三段又变成第一段功能
当前想,不论掰到第二段还是第三段,都收起起落架,只有第一段是放下起落架,就要用到前面带!
号开关定义了。
!
SA↑,就是不论是在第二段或第三段,都执行设立功能,只有第一段时不作用。
除了当前状态一切其他状态,就用!
76.a=x就是表达当某个项目值等于你设立值,才会达到条件,不不大于或不大于都不成立。
A可以是某个摇杆、旋钮、开关、回传值、通道值等等,可以是遥控器上一切。
A为设立触发条件。
例如摇杆超过80%,就是A>80时,触发某项功能实行。
举个例子,a A为电压,设定电压不大于21.5V时四轴自动返航。 意思是当电压低于21.5V,四轴自动返航。 也就是控上所有可使用硬件,虚拟数据、输出通道数据,等等一切,都可以作为输入来源,可以完毕更复杂自动功能,可以任意输出。 77.OVERRIDE意思是超过范畴,例如设立是100%,数据到了101%就Override了。 78.GV5和GV1都同样是全局变量,用来保存某个数据,例如51约等于50,可实际使用时候到51才会起作用。 约等于和等于实际使用时候差不多。 79.设立里面123三个数据是代表设立3个位置信号不同报警。 当信号低于某个值时候会报警,更低时候会报此外一种警,但遥控器有个问题,低于第二个值时候会同步报两个警。 这问题就浮现了两个声音同步播放时,硬件局限,会发不出声。 这个设立就是解决这个问题,到某一种报警点让此外报警点失效,达到后才会有效。 80.haptic高频头,不支持ppm,因此要使用haptic高频头,为了支持haptic专有合同,就得选这个,并且,不是直接插上就可以用,要焊电路才行。 81.由于版本跨度太大了,早先opentx是可以转换er9x,而当前不行。 如果eepe保存文献companion9x打不开,用companion9x1.52,也可以使用er9x,保存后,将软件改成opentx再打开保存,就能转换了。 82.这里是让你选取相应音频文献,红色标记是让你为开关SA-时作用。 83.最背面那个5是5秒钟循环一遍意思,并且数字可以调。 打勾就能,不打勾就不能,norepeat是不循环。 84.混控里面,curve中GV打勾,和DIFF在一起,就是GV1量叠加在CURVE上。 例如GV是-值,例如,-50,就是当前通道最高位减去50,不影响最低位。 如果是+50就是当前通道最低位+50不影响最高位。 diff就是加运算,不直接数值,把gv值当比例计算。 85.opentx就是同样功能可以用各种方式实现,有直观一点也有繁琐一点。 如果在复杂混控设立中,某些地方不能被占用,就可以用别途径来完毕同样功能 86.当前plus菜单和本来不大同样,不同样是由于用是opentx2.0了。 87.在混控里带“i”就是使用inputs里加工过数据,不带“i”就是跳过inputs设立,这就更灵活了。 88.向导脚本汉化。 opentx 2.0支持lua脚本,在脚本上加中文较好实现


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 睿斯凯 设置 说明 使用 说明书 样本
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 广东省普通高中学业水平考试数学科考试大纲Word文档下载推荐.docx
广东省普通高中学业水平考试数学科考试大纲Word文档下载推荐.docx
-
计算题测试文档格式.docx
-
会计年终总结范文精选10篇Word文件下载.docx
-
基坑支护及降排水方案Word格式文档下载.docx
-
古代诗歌鉴赏一剪梅学案Word文档格式.docx
-
国标舞考级Word文件下载.docx
-
机电工程质量验收规范是什么Word文档下载推荐.docx
-
技术员工作自我评价文档格式.docx
-
交警支队车棚改造工程施工合同文档格式.docx
-
护士变更注册申请审核表与示范文本Word文档下载推荐.docx
-
最新学校新冠肺炎疫情防控应急预案Word文件下载.docx
-
GB50204钢筋规范之欧阳总创编Word格式文档下载.docx
-
《半期整改措施》Word格式.docx
-
诊断 症状学腰背痛关节痛汇总.docx
-
英美文学欣赏The Analysis of Shelleys Ode to the West Wind.docx
-
增值税营改增所得税消费税车购税测试题.docx
-
整理二级建造师管理真题.docx
-
英语三级重点高频词汇导入背单词APP使用.docx
-
浙教版学年九年级数学上册第2章测试题及答案.docx
-
证件照教学设计方案.docx
-
优品课件之《从锁国走向开国的日本》教案.docx
-
整理北京交通大学万用表组装实验报告.docx
-
质量管理计划.docx
-
有机化学鉴别.docx
-
整理照明灯饰灯具行业分类英语词汇.docx
-
濉溪县城市总体规划公示.docx
-
智能化工程质量验收记录表.docx
-
学生会纪检部工作总结.docx
-
幼儿园保教主任发言稿.docx
-
跆拳道协会工作总结.docx
-
中国茶叶店连锁市场竞争分析与竞争战略研究报告.docx
-
学宪法讲宪法主题演讲稿800字精选5篇弘扬宪法精神演讲稿5篇.docx
-
党团范文 高中学生爱心基金申请书范文Word下载.docx
-
个人工作总结800字范文集锦Word格式文档下载.docx
-
面向对象总结Word格式.docx
-
归纳内容归纳内容要点Word格式.docx
-
教育学常考大题分析剖析Word文档格式.docx
-
栏目策划方案pptWord文档下载推荐.docx
-
合肥一模安徽省合肥市届高三第一次模拟考试理综试题word附答案精品Word格式.docx
-
个人月度工作总结Word文档下载推荐.docx
-
美景天城3032施工设计Word文档下载推荐.docx
-
劳动合同法解读文档格式.docx
-
精编财务会计及管理基础知识分析重点文档格式.docx
-
精品人教版七年级英语上学期期中试题含答案Word格式.docx
-
国际贸易理论实务论文20XX年国际贸易理论与实务试题文档格式.docx
-
教育专用高考语文二轮专题复习测试题汇编新课标地区Ⅱ作文Word版Word文档格式.docx
-
高中生物必修3单元测试必修3之13章Word文件下载.docx
-
李广明开关磁阻电机软特性的软件设计Word文档下载推荐.docx
-
第2章0和1语义符号化符号计算化与计算自动化练习题答案解析docWord文档格式.docx
-
各种仪表工作原理安装使用故障维修知识汇总Word格式.docx
-
小学三年级英语常见短语Word格式文档下载.docx
