 三陀螺仪mpu6050测试程序.docx
三陀螺仪mpu6050测试程序.docx
- 文档编号:4180235
- 上传时间:2022-11-28
- 格式:DOCX
- 页数:14
- 大小:420.29KB
三陀螺仪mpu6050测试程序.docx
《三陀螺仪mpu6050测试程序.docx》由会员分享,可在线阅读,更多相关《三陀螺仪mpu6050测试程序.docx(14页珍藏版)》请在冰豆网上搜索。
三陀螺仪mpu6050测试程序
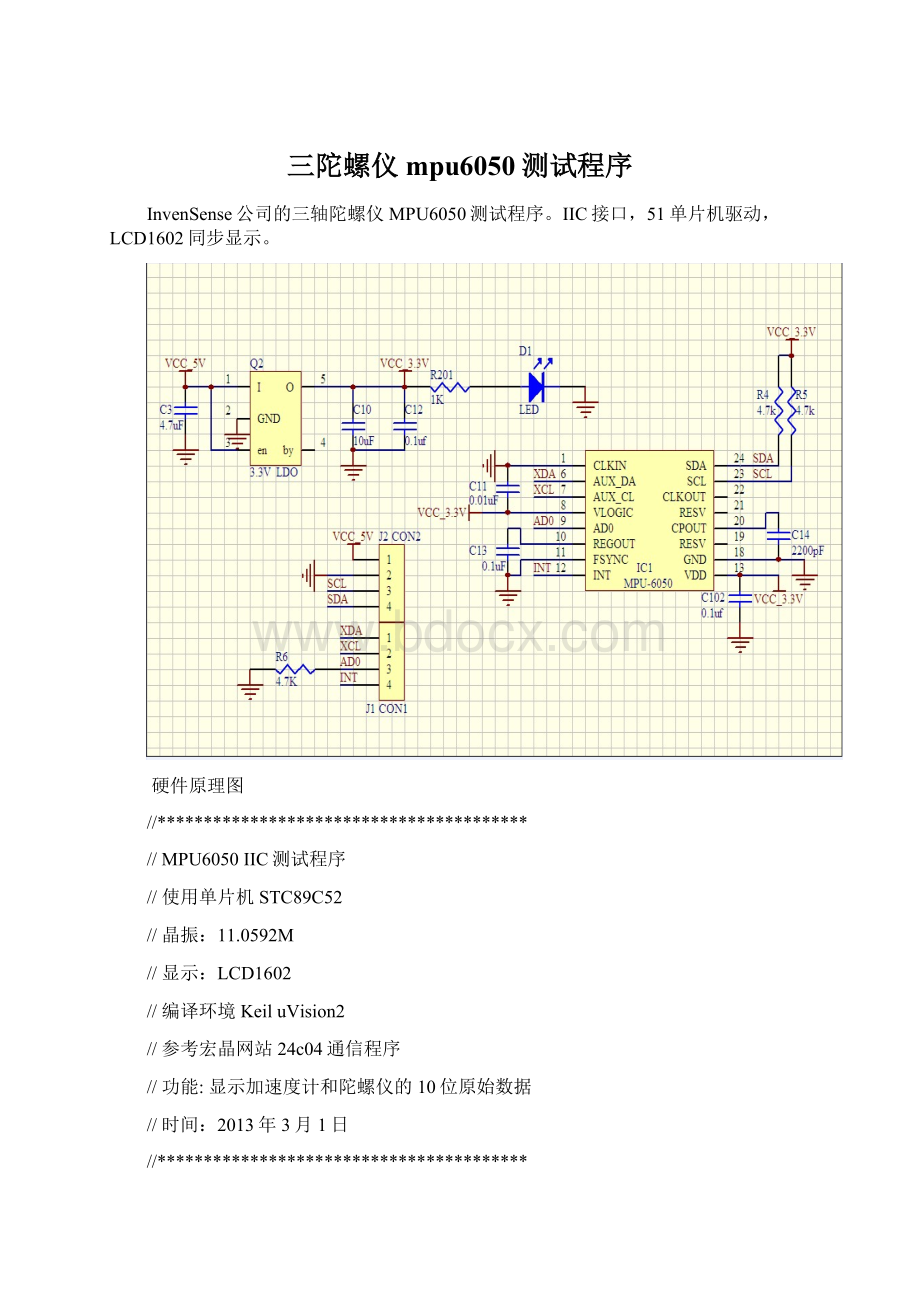
InvenSense公司的三轴陀螺仪MPU6050测试程序。
IIC接口,51单片机驱动,LCD1602同步显示。
硬件原理图
//****************************************
//MPU6050IIC测试程序
//使用单片机STC89C52
//晶振:
11.0592M
//显示:
LCD1602
//编译环境KeiluVision2
//参考宏晶网站24c04通信程序
//功能:
显示加速度计和陀螺仪的10位原始数据
//时间:
2013年3月1日
//****************************************
#include
#include
#include
#include
typedefunsignedcharuchar;
typedefunsignedshortushort;
typedefunsignedintuint;
//****************************************
//定义51单片机端口
//****************************************
#defineDataPortP0//LCD1602数据端口
sbitSCL=P1^0;//IIC时钟引脚定义
sbitSDA=P1^1;//IIC数据引脚定义
sbitLCM_RS=P2^0;//LCD1602命令端口
sbitLCM_RW=P2^1;//LCD1602命令端口
sbitLCM_EN=P2^2;//LCD1602命令端口
//****************************************
//定义MPU6050内部地址
//****************************************
#defineSMPLRT_DIV0x19//陀螺仪采样率,典型值:
0x07(125Hz)
#defineCONFIG0x1A//低通滤波频率,典型值:
0x06(5Hz)
#defineGYRO_CONFIG0x1B//陀螺仪自检及测量范围,典型值:
0x18(不自检,2000deg/s)
#defineACCEL_CONFIG0x1C//加速计自检、测量范围及高通滤波频率,典型值:
0x01(不自检,2G,5Hz)
#defineACCEL_XOUT_H0x3B
#defineACCEL_XOUT_L0x3C
#defineACCEL_YOUT_H0x3D
#defineACCEL_YOUT_L0x3E
#defineACCEL_ZOUT_H0x3F
#defineACCEL_ZOUT_L0x40
#defineTEMP_OUT_H0x41
#defineTEMP_OUT_L0x42
#defineGYRO_XOUT_H0x43
#defineGYRO_XOUT_L0x44
#defineGYRO_YOUT_H0x45
#defineGYRO_YOUT_L0x46
#defineGYRO_ZOUT_H0x47
#defineGYRO_ZOUT_L0x48
#definePWR_MGMT_10x6B//电源管理,典型值:
0x00(正常启用)
#defineWHO_AM_I0x75//IIC地址寄存器(默认数值0x68,只读)
#defineSlaveAddress0xD0//IIC写入时的地址字节数据,+1为读取
//****************************************
//定义类型及变量
//****************************************
uchardis[4];//显示数字(-511至512)的字符数组
intdis_data;//变量
//intTemperature,Temp_h,Temp_l;//温度及高低位数据
//****************************************
//函数声明
//****************************************
voiddelay(unsignedintk);//延时
//LCD相关函数
voidInitLcd();//初始化lcd1602
voidlcd_printf(uchar*s,inttemp_data);
voidWriteDataLCM(uchardataW);//LCD数据
voidWriteCommandLCM(ucharCMD,ucharAttribc);//LCD指令
voidDisplayOneChar(ucharX,ucharY,ucharDData);//显示一个字符
voidDisplayListChar(ucharX,ucharY,uchar*DData,L);//显示字符串
//MPU6050操作函数
voidInitMPU6050();//初始化MPU6050
voidDelay5us();
voidI2C_Start();
voidI2C_Stop();
voidI2C_SendACK(bitack);
bitI2C_RecvACK();
voidI2C_SendByte(uchardat);
ucharI2C_RecvByte();
voidI2C_ReadPage();
voidI2C_WritePage();
voiddisplay_ACCEL_x();
voiddisplay_ACCEL_y();
voiddisplay_ACCEL_z();
ucharSingle_ReadI2C(ucharREG_Address);//读取I2C数据
voidSingle_WriteI2C(ucharREG_Address,ucharREG_data);//向I2C写入数据
//****************************************
//整数转字符串
//****************************************
voidlcd_printf(uchar*s,inttemp_data)
{
if(temp_data<0)
{
temp_data=-temp_data;
*s='-';
}
else*s='';
*++s=temp_data/100+0x30;
temp_data=temp_data%100;//取余运算
*++s=temp_data/10+0x30;
temp_data=temp_data%10;//取余运算
*++s=temp_data+0x30;
}
//****************************************
//延时
//****************************************
voiddelay(unsignedintk)
{
unsignedinti,j;
for(i=0;i { for(j=0;j<121;j++); } } //**************************************** //LCD1602初始化 //**************************************** voidInitLcd() { WriteCommandLCM(0x38,1); WriteCommandLCM(0x08,1); WriteCommandLCM(0x01,1); WriteCommandLCM(0x06,1); WriteCommandLCM(0x0c,1); DisplayOneChar(0,0,'A'); DisplayOneChar(0,1,'G'); } //**************************************** //LCD1602写允许 //**************************************** voidWaitForEnable(void) { DataPort=0xff; LCM_RS=0;LCM_RW=1;_nop_(); LCM_EN=1;_nop_();_nop_(); while(DataPort&0x80); LCM_EN=0; } //**************************************** //LCD1602写入命令 //**************************************** voidWriteCommandLCM(ucharCMD,ucharAttribc) { if(Attribc)WaitForEnable(); LCM_RS=0;LCM_RW=0;_nop_(); DataPort=CMD;_nop_(); LCM_EN=1;_nop_();_nop_();LCM_EN=0; } //**************************************** //LCD1602写入数据 //**************************************** voidWriteDataLCM(uchardataW) { WaitForEnable(); LCM_RS=1;LCM_RW=0;_nop_(); DataPort=dataW;_nop_(); LCM_EN=1;_nop_();_nop_();LCM_EN=0; } //**************************************** //LCD1602写入一个字符 //**************************************** voidDisplayOneChar(ucharX,ucharY,ucharDData) { Y&=1; X&=15; if(Y)X|=0x40; X|=0x80; WriteCommandLCM(X,0); WriteDataLCM(DData); } //**************************************** //LCD1602显示字符串 //**************************************** voidDisplayListChar(ucharX,ucharY,uchar*DData,L) { ucharListLength=0; Y&=0x1; X&=0xF; while(L--) { DisplayOneChar(X,Y,DData[ListLength]); ListLength++; X++; } } //************************************** //延时5微秒(STC90C52RC@12M) //不同的工作环境,需要调整此函数 //当改用1T的MCU时,请调整此延时函数 //************************************** voidDelay5us() { _nop_();_nop_();_nop_();_nop_(); _nop_();_nop_();_nop_();_nop_(); _nop_();_nop_();_nop_();_nop_(); _nop_();_nop_();_nop_();_nop_(); _nop_();_nop_();_nop_();_nop_(); _nop_();_nop_();_nop_();_nop_(); } //************************************** //I2C起始信号 //************************************** voidI2C_Start() { SDA=1;//拉高数据线 SCL=1;//拉高时钟线 Delay5us();//延时 SDA=0;//产生下降沿 Delay5us();//延时 SCL=0;//拉低时钟线 } //************************************** //I2C停止信号 //************************************** voidI2C_Stop() { SDA=0;//拉低数据线 SCL=1;//拉高时钟线 Delay5us();//延时 SDA=1;//产生上升沿 Delay5us();//延时 } //************************************** //I2C发送应答信号 //入口参数: ack(0: ACK1: NAK) //************************************** voidI2C_SendACK(bitack) { SDA=ack;//写应答信号 SCL=1;//拉高时钟线 Delay5us();//延时 SCL=0;//拉低时钟线 Delay5us();//延时 } //************************************** //I2C接收应答信号 //************************************** bitI2C_RecvACK() { SCL=1;//拉高时钟线 Delay5us();//延时 CY=SDA;//读应答信号 SCL=0;//拉低时钟线 Delay5us();//延时 returnCY; } //************************************** //向I2C总线发送一个字节数据 //************************************** voidI2C_SendByte(uchardat) { uchari; for(i=0;i<8;i++)//8位计数器 { dat<<=1;//移出数据的最高位 SDA=CY;//送数据口 SCL=1;//拉高时钟线 Delay5us();//延时 SCL=0;//拉低时钟线 Delay5us();//延时 } I2C_RecvACK(); } //************************************** //从I2C总线接收一个字节数据 //************************************** ucharI2C_RecvByte() { uchari; uchardat=0; SDA=1;//使能内部上拉,准备读取数据, for(i=0;i<8;i++)//8位计数器 { dat<<=1; SCL=1;//拉高时钟线 Delay5us();//延时 dat|=SDA;//读数据 SCL=0;//拉低时钟线 Delay5us();//延时 } returndat; } //************************************** //向I2C设备写入一个字节数据 //************************************** voidSingle_WriteI2C(ucharREG_Address,ucharREG_data) { I2C_Start();//起始信号 I2C_SendByte(SlaveAddress);//发送设备地址+写信号 I2C_SendByte(REG_Address);//内部寄存器地址, I2C_SendByte(REG_data);//内部寄存器数据, I2C_Stop();//发送停止信号 } //************************************** //从I2C设备读取一个字节数据 //************************************** ucharSingle_ReadI2C(ucharREG_Address) { ucharREG_data; I2C_Start();//起始信号 I2C_SendByte(SlaveAddress);//发送设备地址+写信号 I2C_SendByte(REG_Address);//发送存储单元地址,从0开始 I2C_Start();//起始信号 I2C_SendByte(SlaveAddress+1);//发送设备地址+读信号 REG_data=I2C_RecvByte();//读出寄存器数据 I2C_SendACK (1);//接收应答信号 I2C_Stop();//停止信号 returnREG_data; } //************************************** //初始化MPU6050 //************************************** voidInitMPU6050() { Single_WriteI2C(PWR_MGMT_1,0x00);//解除休眠状态 Single_WriteI2C(SMPLRT_DIV,0x07); Single_WriteI2C(CONFIG,0x06); Single_WriteI2C(GYRO_CONFIG,0x18); Single_WriteI2C(ACCEL_CONFIG,0x01); } //************************************** //合成数据 //************************************** intGetData(ucharREG_Address) { charH,L; H=Single_ReadI2C(REG_Address); L=Single_ReadI2C(REG_Address+1); return(H<<8)+L;//合成数据 } //************************************** //在1602上显示10位数据 //************************************** voidDisplay10BitData(intvalue,ucharx,uchary) { value/=64;//转换为10位数据 lcd_printf(dis,value);//转换数据显示 DisplayListChar(x,y,dis,4);//启始列,行,显示数组,显示长度 } //************************************** //显示温度 //************************************** //voiddisplay_temp() //{ //Temp_h=Single_ReadI2C(TEMP_OUT_H);//读取温度 //Temp_l=Single_ReadI2C(TEMP_OUT_L);//读取温度 //Temperature=Temp_h<<8|Temp_l;//合成温度 //Temperature=35+((double)(Temperature+13200))/280;//计算出温度 //lcd_printf(dis,Temperature);//转换数据显示 //DisplayListChar(11,1,dis,4);//启始列,行,显示数组,显示位数 //} //********************************************************* //主程序 //********************************************************* voidmain() { delay(500);//上电延时 InitLcd();//液晶初始化 InitMPU6050();//初始化MPU6050 delay(150); while (1) { Display10BitData(GetData(ACCEL_XOUT_H),2,0);//显示X轴加速度 Display10BitData(GetData(ACCEL_YOUT_H),7,0);//显示Y轴加速度 Display10BitData(GetData(ACCEL_ZOUT_H),12,0);//显示Z轴加速度 Display10BitData(GetData(GYRO_XOUT_H),2,1);//显示X轴角速度 Display10BitData(GetData(GYRO_YOUT_H),7,1);//显示Y轴角速度 Display10BitData(GetData(GYRO_ZOUT_H),12,1);//显示Z轴角速度 delay(500); } }


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 陀螺仪 mpu6050 测试 程序
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 如何打造酒店企业文化2刘田江doc.docx
如何打造酒店企业文化2刘田江doc.docx
-
律师提供著作权法律服务业务操作指引.docx
-
18秋福建师范大学《经济法》在线作业一.docx
-
施工现场危险源.docx
-
山东省潍坊市昌乐县学年七年级地理下学期期中学业质量评估试题.docx
-
新视野大学英语视听说教程第二版第一册完整答案.docx
-
精校版重庆市 初中毕业水平暨高中招生考试中考英语试题AB卷Word版含答案解析.docx
-
新视野大学英语视听说教程第二版第一册完整答案.docx
-
江苏省刘国钧中学1112学年高二语文上学期期末考前辅导试题卷苏教版会员独享.docx
-
山东省潍坊市昌乐县学年七年级地理下学期期中学业质量评估试题.docx
-
西安交通大学18年课程考试《管理会计》作业考核试题.docx
-
施工安全保证体系.docx
-
南开17秋学期《科学启蒙尔雅》在线作业2.docx
-
秋福师《大学英语1》在线作业二.docx
-
231695 北交《运输物流管理》在线作业2 15秋答案.docx
-
梁原学区安全管理工作实施方案.docx
-
环保管理台帐明细.docx
-
我国三大翻译证书考试概览.docx
-
东大17秋学期《大学英语二》在线作业31.docx
-
静态分析指标.docx
-
山东金瀚控股金瀚置业绩效考核指标库.docx
-
B0301A国际贸易.docx
-
人教版八年级数学上册同步练习试题及答案第11章《三角形》 同步练习及答案111.docx
-
秋福师《概率论》在线作业二.docx
-
17秋福师《高级英语阅读二》在线作业一.docx
-
西南大学17秋0764《工程建设监理》在线作业参考资料.docx
-
生活宝典之社会大转盘一.docx
-
专卖店管理.docx
-
100个CFO的八年之资金管理篇.docx
-
东北师范古代汉语三16秋在线作业2.docx
-
专业技术人员公共危机管理考试.docx
-
东大17秋学期《大学英语二》在线作业31.docx
-
人力资源分析指标解析.docx
-
建筑消防节能工程节能施工方案.docx
-
成绩检讨书800字.docx
-
材料范文之材料生产实习报告范文.docx
-
变电站接地网大修工程施工方案.docx
-
电视直播设计方案策划.docx
-
国网技能鉴定11055变电检修工初级工网考题库最全.docx
-
《春雨的色彩》中班语言教案.docx
-
度工作总结5篇与度工作总结及工作年工作打算汇编doc.docx
-
某31层高层建筑抹灰施工方案.docx
-
最新文档音乐职业生涯规划书word版本 11页.docx
-
最新文档机械设计笔试题目及答案分享word版本 14页.docx
-
核与辐射事故医学应急.docx
-
浙江省衢州市高三教学质量检测 数学理 Word版含答案.docx
-
安徽中考历史高频考点 中国近现代化.docx
-
部编最新人教版小学语文二年级上册第一至四单元重要知识点精编版.docx
-
备用金管理办法.docx
-
最新pep六年级上册Unit3myweekendplan.docx
-
政府大数据治理体系的框架及其实现的有效路径.docx
