 定日镜跟踪系统设计.docx
定日镜跟踪系统设计.docx
- 文档编号:3630383
- 上传时间:2022-11-24
- 格式:DOCX
- 页数:13
- 大小:866.38KB
定日镜跟踪系统设计.docx
《定日镜跟踪系统设计.docx》由会员分享,可在线阅读,更多相关《定日镜跟踪系统设计.docx(13页珍藏版)》请在冰豆网上搜索。
定日镜跟踪系统设计
定日镜跟踪系统设计
定日镜跟踪系统的设计
定日镜在电站中不仅数量最多、占据场地最大,而且是工程投资的重头。
定日镜的跟踪效果严重影响着太阳能的利用效率。
研究表明:
对日跟踪与不跟踪,能量的接受效率相差37.7%,精确地跟踪太阳可使接收器的热效率大大提高,进而提高整个装置的太阳能利用率,从而拓宽太阳能的利用领域。
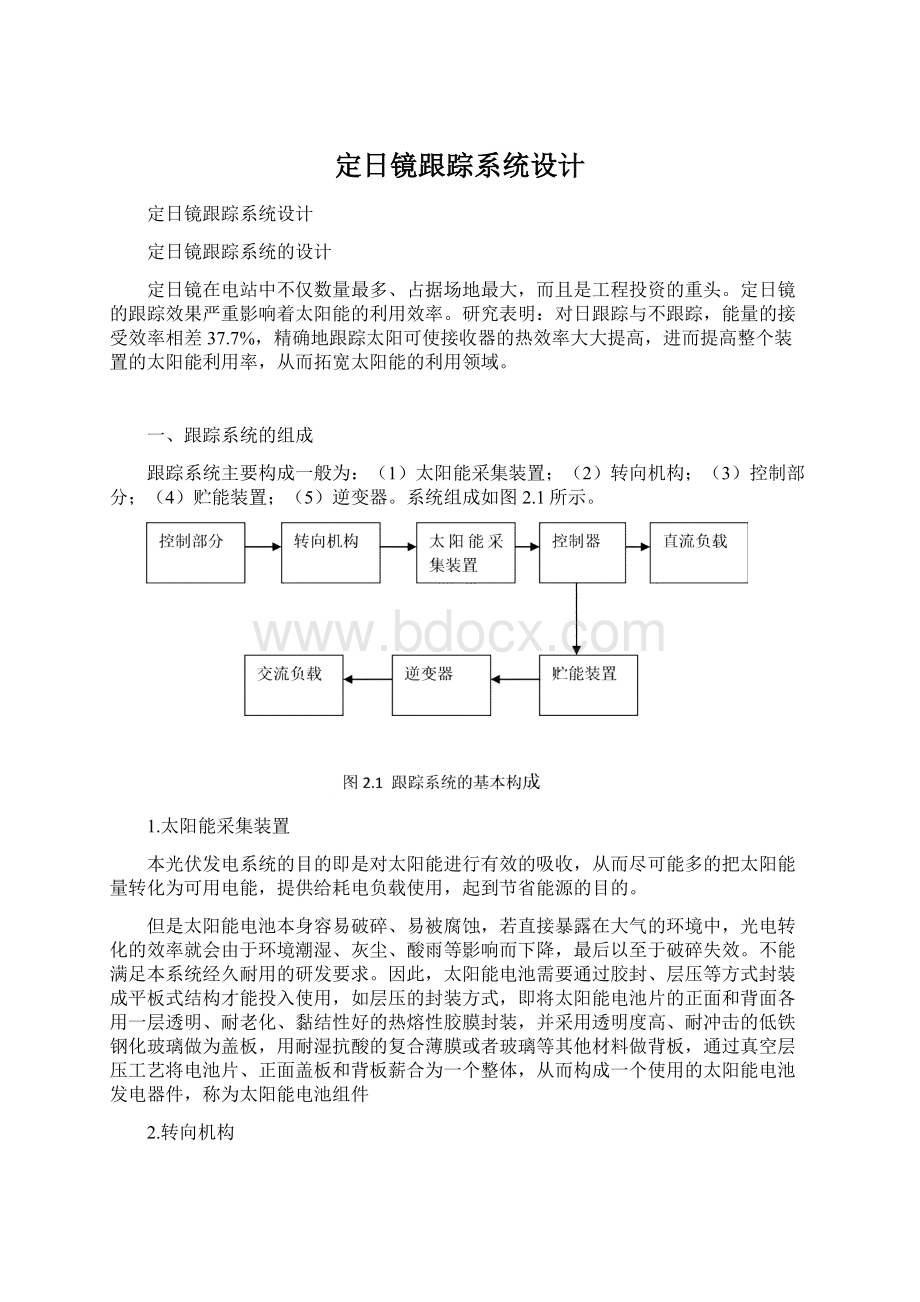
一、跟踪系统的组成
跟踪系统主要构成一般为:
(1)太阳能采集装置;
(2)转向机构;(3)控制部分;(4)贮能装置;(5)逆变器。
系统组成如图2.1所示。
1.太阳能采集装置
本光伏发电系统的目的即是对太阳能进行有效的吸收,从而尽可能多的把太阳能量转化为可用电能,提供给耗电负载使用,起到节省能源的目的。
但是太阳能电池本身容易破碎、易被腐蚀,若直接暴露在大气的环境中,光电转化的效率就会由于环境潮湿、灰尘、酸雨等影响而下降,最后以至于破碎失效。
不能满足本系统经久耐用的研发要求。
因此,太阳能电池需要通过胶封、层压等方式封装成平板式结构才能投入使用,如层压的封装方式,即将太阳能电池片的正面和背面各用一层透明、耐老化、黏结性好的热熔性胶膜封装,并采用透明度高、耐冲击的低铁钢化玻璃做为盖板,用耐湿抗酸的复合薄膜或者玻璃等其他材料做背板,通过真空层压工艺将电池片、正面盖板和背板薪合为一个整体,从而构成一个使用的太阳能电池发电器件,称为太阳能电池组件
2.转向机构
用来跟踪太阳的实时位置,主要由底座、驱动电机、联轴器、减速机构、电池板固定框架等构成。
底座主要由普通的钢材加工而成,便于拆卸和移动。
驱动电机选用的是步进电机,此种电机性能可靠,对于角度量转向控制精确。
连轴器选用的是普遍使用的弹性联轴器,耐冲击,经久耐用。
由于研发要求系统要结构紧凑,电机选取的为小型步进电机,输出扭矩达不到转向要求,因此要选用减速机构来提升输出扭矩,在本光伏系统中,选取的是小型涡轮蜗杆减速机构;并且,太阳的角度控制要求精确,要合理的选取涡轮蜗杆减速机构的传动比,在系统设计中选用的传动比为50:
1即可达到要求。
电池板固定架用来对太阳能电池板进行固定,要求设计合理,稳定。
3.控制部分
要根据即时时间进行太阳角度的运算,调整系统精确转向,因此要合理选用控制芯片完成此功能。
4.贮能装置
本系统的制造目的是对太阳能进行采集,并加以利用,因此需要将太阳能电池组件产生的电能储存起来,用于其他耗电场合.
5.逆变器
采用逆变器将蓄电池的直流电转化为普通用电器可以使用的交流电。
6.控制器
为了最大限度地利用蓄电池的性能和延长使用寿命,必须对它的充电条件加以规定和控制。
二、太阳高度角和方位角的确定
1、太阳角的定义
如下图所示,指向太阳的向量
与天顶Z的夹角定义为天顶角,用
表示;向量
与地平面的夹角定义为太阳高度角,用h表示;
在地面上的投影线与南北方向线之间的夹角为太阳方位角,用
表示。
太阳的时角用
表示,它定义为:
在正午时
=0,每隔一个小时增加15°,上午为正,下午为负。
根据Coper方程可得:
=23.45sin
,(其中
为太阳赤纬,d为自春分日起的第d天,春分为3月21日)
1)太阳高度角
计算太阳高度角的表达式为
sinh=sin
sin
+cos
cos
cos
(1.3)
式中,
沪为地理纬度;
占为太阳赤纬;
口为太阳时角。
2)太阳方位角
太阳方位角按下式计算,
cos
=
(1.6)
也可用下式计算:
sin
=
3)日照时间
太阳在地平线的出没瞬间,其太阳高度角h=0。
若不考虑地表曲率及大气折射的影响,根据式(4.3),可得出日出日没时角表达式
cos
=-tan
tan
(1.8)
式中
-日出或日没时角,以度表示,正为日没时角;负为日出时角。
对于北半球,当-1
-tan
tan
+1,解式(1.8),有
=arccos(-tan
tan
)(1.9)
求出时角
后,日出日没时间用t=
求出。
一天中可能的日照时间由下式给出:
N=
arccos(-tan
tan
)
三、机械部分的设计
(一)减速装置的选型
在发电系统的研制中,要求结构紧凑,因此要选用的电机体积不能太大,由于结构的限制,电机的功率和扭矩也不会很大,不能直接带动机械转向机构做跟踪太阳的运动。
因此要选用合适的减速机构来提高扭矩,使转向机构正常运转。
为了满足整个系统结构紧凑、体积小的要求,在本机械转向机构中可以选用的减速器有以下三种:
涡轮蜗杆减速器、谐波减速器和行星减速器。
这三种减速器的性能比较如表。
这三种减速器各自的特点如下:
(1)蜗轮蜗杆减速器的主要特点是具有反向自锁功能,可以有较大的减速比,输入轴和输出轴不在同一轴线上,也不在同一平面上。
但是一般体积较大,传动效率不高。
(2)谐波减速器的谐波传动是利用柔性元件可控的弹性变形来传递运动和动力的,体积不大、精度很高,但缺点是柔轮寿命有限、不耐冲击,刚性与金属件相比较差。
输入转速不能太高。
(3)行星减速器其优点是结构比较紧凑,回程间隙小、精度较高,使用寿命很长,额定输出扭矩可以做的很大。
但价格略贵。
本系统由于起停比较频繁,冲击较大,因此不适合选用谐波减速器。
行星减速器虽然精度较高,但价格昂贵,也不能满足本太阳能光伏发电系统的设计初衷。
因此在本双轴跟踪机构中,选取涡轮蜗杆减速器是较为合适的。
表3.1减速器性能比较表
类型
涡轮蜗杆减速器
谐波减速器
行星减速器
体积
中
小
小
刚性
高
中
低
寿命
中
短
长
效率
低
高
高
输入转速
3000以上
2000以下
2000以下
在本设计中具体选用的涡轮蜗杆减速器为涡轮蜗杆减速箱,此减速机的结构小巧而紧凑、外形美观、体积小,箱体的各个面上都有安装孔位,可以适应各种安装方式。
(二)驱动电机的选型
本太阳能自动跟踪光伏发电系统要求能够比较准确的跟踪太阳位置,因此要求驱动电机能够准确的把电信号转化为电机轴上的角位移。
本系统选取步进电机作为驱动电机。
步进电机又称为脉冲电动机,是数字控制系统中的一种执行元件。
其功用是将脉冲电信号变换成相应的角位移或直线位移,即给一个脉冲电信号,电动机就转动一个角度或前进一步。
步进电动机的移量
或者线位移量S与脉冲数k成正比;它的转速n,或者线速度v与脉冲频率f成正比。
在负载能力范围内这些关系不因电源电压、负载大小、环境条件的波动而变化.因而可适用于开环系统中作为执行元件,使控制系统大为简化。
步进电动机可以在很宽的范围内通过改变脉冲频率来调速;能够快速反转和制动。
它不需要变换可直接将数字脉冲信号转换为角位移,很适合采用微型计算机控制。
步进电动机是纯粹的数字控制电动机。
它将电脉冲信号转变成角位移,即给一个脉冲信号,步动机就转动一个角度,因此作常适合于单片机控制。
按励磁方式分类,步进电动机可分为3大类:
(1)反应式步进电动机(anvbaelelrcutance,简称vR)
反应式步进电动机又称为磁阻式步进电动机。
它的转子是由软磁材料制成的,转子中没有绕组。
它的结构简单,成本低,步距角可以做得很小,.但动态性能较差。
(2)永磁式步进电功机(Pemranentmanegt,简称PM)
永磁式步进电动机的转子是用永磁材料制成的.转子本身就是一个磁源。
它的输出转矩大,动态性能好。
转子的极数与定子的极数相同,所以步距角一般较大。
需供给正负脉冲信号。
(3)混合式步进电动机(hybird,简称HB)
混合式步进电动机也称为感应式步进电动机。
它综合了反应式和永磁式两者的优点,它的输出转矩大,动态性能好,步距角小。
在本设计中,考虑到驱动电机带动的负载较大,故选用了两相混合式步进电机做为系统驱动源。
在对多种减速装置和多种步进电机进行了对比后,确定了较适合本系统的涡轮蜗杆减速器和两相混合式步进电机应用于本系统。
具体型号在对系统进行受力分析后,根据系统的动力需求进行选取。
四、传动系统的受力分析和尺寸、角度的确定
θ
质心在中心转轴产生的力矩M=mglsinθ,随着θ的减小而减小,方向为逆时针;
考虑到平面镜是从水平面顺时针转动,风的扭矩则
逆时针,则此时两者作用在中心转轴上的扭矩之和为:
M总=mglsinθ+M风
由图可以看出,其中临界角度比28.6°大,考虑到不发生干涉,当θ为60°时风的扭矩最大,此时要使丝杆受力最小,则最好是质心产生的扭矩最小,则θ=60°此时刚好丝杆的受力也几乎在质心距影响较大和风扭矩情况下大致相同。
图中a为铰动连接摇杆的最短距离,
a=L1/2
θ假设初位置如图所示,则在初位置
丝杆力矩:
M=Fcosθ·L1sin(150°-θ)
60°
从图中可以看出:
当θ=30°时,该式取得最大值,得出铰连接摇杆的长,与推杆力臂的长度相同。
丝杆从初始位置到中心转轴垂线的距离l1=0。
30°
此时丝杆终点距中心转轴垂线距离l2=74.55cm(其中那个钝角算得157.3°,是一个定值,所以推杆力臂的长度越大,则行程越大,又因前式得推杆力臂尺寸越大,受力越小,则初取L1=50cm)
所以丝杆的行程l=l1+l2=74.55cm
推杆力臂摆至右边三十度时,L2至少89.76cm,选95cm
五、传动各部件的受力
1、推杆力臂
推杆力臂受转轴对它的支撑力,铰连接对它的拉力
2、铰连接
铰连接受推杆力臂对它的拉力,丝杆对它的拉力
3、丝杆
丝杆受电动机的扭矩,受铰连接的拉力座驾力臂的支撑力
后来丝杆受压力和座驾力臂的支撑力,和电动机的扭矩
4、座驾力臂
座驾力臂受转轴对它的支撑力,受丝杆对它的压力
丝杆的受力
六、电机和减速装置的选型确定
对于丝杆受力,匀速运行,非精确计算可以套用以下公式:
Ta=(Fa*I)/(2*3.14*n1)
Ta:
驱动扭矩kgf.mm;
Fa:
轴向负载N(Fa=F+µmg,F:
丝杠的轴向切削力N,µ:
导向件的综合摩擦系数,m:
移动物体重量(工作台+工件)kg,g:
9.8);
I:
丝杠导程mm;
n1:
进给丝杠的效率
选取FF3210-5丝杆,取效率n1为0.9,可知在丝杆最大受力Fa=27158N下
Ta=480Nm
据此可选步进电机86BYGH603
电机型号步距角机身长电压电流电阻电感
86BYGH6031.81502.550.55.5
静力矩引线数转动惯量重量
1043.65
依据之前选取涡轮蜗杆减速器,知符合要求,传动比48


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 定日 跟踪 系统 设计
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 如何打造酒店企业文化2刘田江doc.docx
如何打造酒店企业文化2刘田江doc.docx
-
律师提供著作权法律服务业务操作指引.docx
-
18秋福建师范大学《经济法》在线作业一.docx
-
施工现场危险源.docx
-
山东省潍坊市昌乐县学年七年级地理下学期期中学业质量评估试题.docx
-
新视野大学英语视听说教程第二版第一册完整答案.docx
-
精校版重庆市 初中毕业水平暨高中招生考试中考英语试题AB卷Word版含答案解析.docx
-
新视野大学英语视听说教程第二版第一册完整答案.docx
-
江苏省刘国钧中学1112学年高二语文上学期期末考前辅导试题卷苏教版会员独享.docx
-
山东省潍坊市昌乐县学年七年级地理下学期期中学业质量评估试题.docx
-
西安交通大学18年课程考试《管理会计》作业考核试题.docx
-
施工安全保证体系.docx
-
南开17秋学期《科学启蒙尔雅》在线作业2.docx
-
秋福师《大学英语1》在线作业二.docx
-
231695 北交《运输物流管理》在线作业2 15秋答案.docx
-
梁原学区安全管理工作实施方案.docx
-
环保管理台帐明细.docx
-
我国三大翻译证书考试概览.docx
-
东大17秋学期《大学英语二》在线作业31.docx
-
静态分析指标.docx
-
山东金瀚控股金瀚置业绩效考核指标库.docx
-
B0301A国际贸易.docx
-
人教版八年级数学上册同步练习试题及答案第11章《三角形》 同步练习及答案111.docx
-
秋福师《概率论》在线作业二.docx
-
17秋福师《高级英语阅读二》在线作业一.docx
-
西南大学17秋0764《工程建设监理》在线作业参考资料.docx
-
生活宝典之社会大转盘一.docx
-
专卖店管理.docx
-
100个CFO的八年之资金管理篇.docx
-
东北师范古代汉语三16秋在线作业2.docx
-
专业技术人员公共危机管理考试.docx
-
东大17秋学期《大学英语二》在线作业31.docx
-
会主持词开场白.docx
-
火电厂常规的自动控制系统.docx
-
加气站现场处置方案生产安全事故应急预案.docx
-
机电设备点检标准.docx
-
家庭详细的装饰装修合同合同范本.docx
-
家装旺季营销宝典.docx
-
家装节活动策划方案.docx
-
机械零件切削加工复习.docx
-
基本服务承诺额外服务承诺书模板.docx
-
监控系统检测报告.docx
-
监控指挥中心系统集成项目.docx
-
基于51单片机点光源自动跟踪系统设计.docx
-
检验批划分及检验试验方案.docx
-
见证材料取样方法及标准.docx
-
基于电流互感器的单相交流电流测量系统设计检测技术.docx
-
急救复习题教学内容.docx
-
计量经济学选择题.docx
-
计算机系统验证方案.docx
-
纪委标准化建设工作汇报.docx
