 摄像头模组基础知识扫盲.docx
摄像头模组基础知识扫盲.docx
- 文档编号:353865
- 上传时间:2022-10-09
- 格式:DOCX
- 页数:10
- 大小:499.80KB
摄像头模组基础知识扫盲.docx
《摄像头模组基础知识扫盲.docx》由会员分享,可在线阅读,更多相关《摄像头模组基础知识扫盲.docx(10页珍藏版)》请在冰豆网上搜索。
摄像头模组基础知识扫盲
摄像头模组基础扫盲
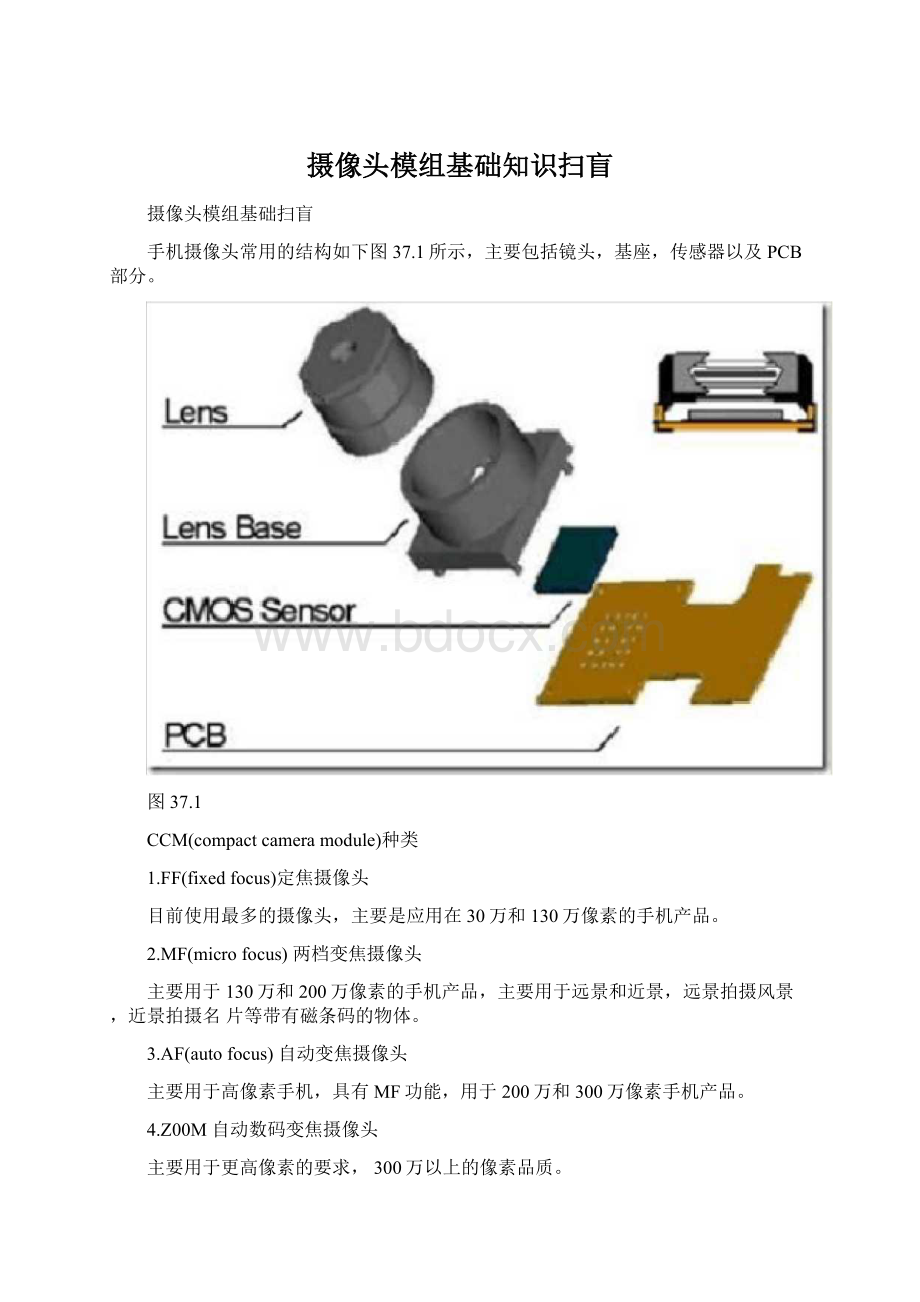
手机摄像头常用的结构如下图37.1所示,主要包括镜头,基座,传感器以及PCB部分。
图37.1
CCM(compactcameramodule)种类
1.FF(fixedfocus)定焦摄像头
目前使用最多的摄像头,主要是应用在30万和130万像素的手机产品。
2.MF(microfocus)两档变焦摄像头
主要用于130万和200万像素的手机产品,主要用于远景和近景,远景拍摄风景,近景拍摄名片等带有磁条码的物体。
3.AF(autofocus)自动变焦摄像头
主要用于高像素手机,具有MF功能,用于200万和300万像素手机产品。
4.Z00M自动数码变焦摄像头
主要用于更高像素的要求,300万以上的像素品质。
Lens部分
对于lens来说,其作用就是滤去不可见光,让可见光进入,并投射到传感器上,所以lens相
当于一个带通滤波器。
CMOSSensor部分
对于现在来说,sensor主要分为两类,一类是CMOS,一类是CCD,而且现在CMOS是-个趋势。
对于镜头来讲,一个镜头只能适用于一种传感器,且一般镜头的尺寸应该和sensor的尺寸一致。
对于sensor来说,现在仍然延续着Bayer阵列的使用,如下图37.2所示,图37.3展示了工
作流程,光照0电荷0弱电流aRGB信号aYUV信号。
coluninre.idoutdirt-ction
图37.2
图37.3
图37.4
图37.4展示了sensor的工作原理,这和OV7670以及OV7725完全相同
像素部分
那么对于像素部分,我们常常听到30万像素,120万像素等等,这些代表着什么意思呢?
图
37.5解释了这些名词。
★30万像素—
—最大点阵640X480
(VGA)
★130万像素
最大点阵1280X960
(SXGA)
★200万像素
最大点阵1600X1280
(UXGA)
*300万像素
最大点阵204化1536
图37.5
那么由上面的介绍,可以得岀,我们以30万像素为例,30万像素~=640*480=3
0_7200;可见所谓的像素数也就是一帧图像所具有的像素点数,我们可以联想图像处理的相关知识,这里的像素点数的值,也就是我们常说的灰度值。
像素数越高,当然显示的图像的质量越
好,图像越清晰,但相应的对存储也提岀了一定的要求,在图像处理中,我们也会听到一个概念,
72ppi,也就是每英寸
叫做分辨率,其实这个概念应该具体化,叫做图像的空间分辨率,例如具有72个像素点,比较好的相机,能达到490ppi。
匸图像解析度/分辨率但豁°1曲"}
*QXGA(2fl48x1536},300h锲Sc(3MAGE)
*UXGA{1€OCi1200),200力也&(2MAGE)
*SXGA{1280x1024^130万低數(h3MaGE)
*SVGA{800x600},ft:
50^(O.SMACiE-)
・VGAi640x480)務30万像啟{站刀址曲MXX翻富It宦没齋实詁冏用〉
*CIF(352x288>^107J1Sa
*SIF;aVGA(320x240>
-QCIF{176?
c144)
*QSIF/QQVGA(l60x12€)
常见的sensor
厂商
常用的Sensor;
其它的Sensor;
ffMi
Samsung
OV
OV7546/OV7649
OV76QO
MagnaChip
OV7670
Siliconfile
Micron
MT9V112
SET
PixelPlus
OV
□V9650
OV9653
OV9655
1
q
Micron
MT9M112
ESS
200Xri
OV
OV2640
Micron
台甌
MM
MT9D112
MXICC旺宏〉
Gaiaxycore〔格科黴)
现在大部分市场被OV豪威科技供给所占据着,micron也占有一定的市场份额。
Sensor的圭寸装
SMT,DICE
然后进行引
目前的sensor的封装形式,主要有两种CSP,DICE,CSP所对应的制程为
所对应的制程是COB,关于相关概念解释如下:
CSP:
chipscalepackage,主要由0V在用此圭寸装格式。
COB封装即chipOnboard,就是将裸芯片用导电或非导电胶粘附在互连基板上,线键合实现其电气连接,主要是samsung和micron在用。
那么两种封装形式如下图所示。
聚焦原理
oicecoilmotor),步进马达(steppingmotor),压电马达(piezoelectricmotor),这里主
要介绍一下音圈马达是如何工作的。
VoiceCoilMotor■:
Ji达)«JU^JVCMi闻理是?
tHolder内个小塑的强力磁场,iaSDriverXEWCM内部线圏的吐流而产生班力7/01$用力,从而带动1卩间i^Lens«j丽呂成口幼变黒?
的效果c
运行方式是:
进入仃动调値榄式后,iDriv刖从0列鍛Jd乩理沁就廿逐11剧最犬应務虬此吋Sensor^«Mfn动拍扭阁片片保“到DSP内.DSPiJ过这些图片.计算每一編阁片的WTf%从而住这条MTF艇中找到加大值•丿加过粥対这个点对应的电源大小.再次折出Dri怕淡佻绡WIS这个屯流电血使镜头葩宦在这个成像眄恤和达到日动变压」匚——…
I■巳ns的移动
t
■
星佳成像处
VCMType
在上面的描述中,提到过MTF,即模量传递函数。
MTRMTF值f模厳传
妨]、一*个¥而黑(F]》十一—.LF——”亠・*Tmfw_
的体现用这诚远:
帀丽简潯芋匸‘亦冠)更連和鈍行相血図錢蕖7及区%100%)来说.黴骑缆対频率的强心週过牌头衣现旳反雉就出1应减少(瓦羞小r100%),当找频达前•个(闌畑1000疡也畝)・剧处和触力也只能把它niku戚r耀鴛区时鳌失肉听f他就按近于0.pm.mtf值是•个外于o別izi怙t'MTF实摩_E
数值艮卒「束疥足的空创频曲黑门黑対L
II
关于镜头和sensor几点说明
Blemish(污垢)
1COB面古■尺寸大丁•(仆伸策尺寸泊尘戦關附人而在就诃Llii處7聞翼E网厂2CSP|i=iifr况蚌-哦胸为忧粒黏附粕飙聊t:
悴「淀秤度的堰化冋讯
GSPti协的尘枚肯锻《曲;的W疝!
冷.
3内丿打5朋00%1¥iiSnsor农I阳心既阳低何主純*谯的标瘠益椅邯懂划竹[环域起别一时衙血航-“・・•―
Shading(明暗差别)
Shading
1,SidingJ丄足存机的丽为检头竝計址團解■血址屉区域肚力带內腹pij角愛龙蜀秦如Oil中亦
2傩久的②IShading的彩®鼻幣人曲头的舸雷豪起■贝的对PM进忏补艺丄Ki^i幕种釈箜购悌兄卜-的人小足溝训蜿罠軒埠的參豪之一.
3課涉tnsor鸣叭『以时sMdmqUt烧外偿」诃11期*补惟俏的人小.
47;洱远込学申业仃梃%申心命对屮関拿他上芸塩现网刖啊shading不均匀.
£:
.】二殼-朝鼻ding川阳!
门Aibtightnessshading44e*lwshading.
竄列爲廊淮为吓(怅便场闻-;丄啦淡©大丁篦学屮心时3£l値前9(用
Colorperformaneeandgrayscale
这两个参数一个是反应色彩还原,一个是反应灰度色阶分辨。
Viewangle/distortion
一般以对角线作为标准,这个是由镜头决定的
曲变,主要有桶形和枕形,可接受的标准不超过1%
1•这三環应映的長郭怖血门⑹利呼岀打的ttrtf槪车自夕皿出贤斟试呗M・
2AWB比阙巧hsensor对门忙的止喰能丿川M卜1附:
川为亡吐rIp;.sensor定的时fd丽越*11弔九"巴半九5圈*IS和时紂址IU齢触
3.ALC反映的好禹谪趣的押删俺力严欣求龍止确W.五苗P标闍应血山犬向小戎胃由小视主UffiW^Lsansorffifl-富的时河内裕吒■忻牌乐集的总度怕”値节沈占wytWMJSi瓦隔,
“Sen砒vity駆翹岸疔轴nstx时哦揃‘匚鬧、泊m忆换〔IE"一轉可以宙爲试机商Z!
Ht-蚊丛i-l才丹绘吐J今屮杓肾城卜对制曲權的氏陀忙”
这里关于白平衡(AWB)进行一些说明,白平衡指的是在光线不断变化的情况下,对色彩准确重现的能力,一般的传感器都有自动白平衡功能。
CRA部分
1拍她头和传鳩器Z刨的接口忙&个可舶熬手机蔡统中A枫雲的接口之5疥概头的軽用軒厠鮒来摊鱼瞥盘j达代呼25色盍估習油血虚皿曲仝寺和M来玻匕每个他董上祁育-丫代柚%口曲讹曲山丨燮皿Zf■$仏"I门"和"曲匕注驳哦圧址叱Apu蚌)】「阻若像索位冒的阳址㊈来塔£,菜毁比线握如•唳理在僂第“从向&飲光线描失和愎囊群应降低.
从犍头的f逻家:
M*可以采也和權蛊上的死竣的定义为•个*&.称为卜:
尢角(CRAJ-对于主jtfls的嗷性axfi:
此曲从处的像#;叭应降低为牢度猶<1鳶响应(此时”此ItftJ&fcK于龙兹的)的sw%*
光皎入擁个懺蛍的角鹰将依恢F诲慷素噬处的位豐.幢头涨心竝鮒近的光纨将规按逬零度的谢度进入IS秦中.■<£与输心线的距喜墙大.角度也棉IS之増大.CRA与辂鹭中的匹是栢关的.它Y1之间的关離场続头的设计有費.很静的観眞郁匕倉阳心仝1CTaKA.tuXtt头的CRAHffSK的fiWI头Hi什不匹仏将会出现爪理担的遷过传感81的光域蛊度(也就捷“團影「)・通过改燮徽舗头设计.井对抽援列的图at进tf适马处理.athF£1Jr上陰韓訂亚単申
由上面的描述可以知道,最大的能够聚焦到传感器上面,并且能够覆盖整个像素平面。
Lens
的CRA最好和sensorCRA匹配,若是有偏差,最好不要偏差2°。
Lens:
CRA小于sensorCRA,会岀现四周偏暗的情况,此时光线达不到pixel的边缘;
lensCRA大于sensorCRA,光线折射到临近的pixel,导致pixel之间岀现串扰,岀现图像的偏色,在图像四周变现的更明显,因为CRA从图像中心到四周是呈曲线状上升,逐渐变大的。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 摄像头 模组 基础知识 扫盲
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《稻草人》精彩读书笔记精选多篇.docx
《稻草人》精彩读书笔记精选多篇.docx
-
《鸿门宴》原文及注解doc资料.docx
-
《张石匠拜师》教学设计.docx
-
1万亩滴灌鲜食葡萄建设项目可行性研究报告.docx
-
《长方体和正方体整理与复习课》说课稿.docx
-
7A文铁路隧道工程施工承包合同中英文.docx
-
《纪念刘和珍君》学案1.docx
-
《我们之间》读后感范文6篇.docx
-
BRW200315型乳化液泵组随机图册.docx
-
STM32实现万年历.docx
-
《保险学》考试复习资料要点.docx
-
《讲究卫生预防疾病》国旗下讲话.docx
-
《三国演义》读书笔记摘抄赏析好词好句读后感悟范文.docx
-
《路基路面工程》每章练习题.docx
-
《谛听教育的春天》读书笔记.docx
-
17春学期清考《市政学》在线作业1.docx
-
201X商品房现房买卖合同范本word范文 10页.docx
-
《欧姆定律》课件.docx
-
04上海虹口区高三历史二模课案.docx
-
7A版南大考研真题整理版.docx
-
《蝙蝠和雷达》教学设计.docx
-
2450m3高炉及225000kva矿热炉项目节能论证评估报告.docx
-
《商业银行管理学》课后习题答案.docx
-
《论语十二章》练习答案.docx
-
3年高考2年模拟1年原创系列小说阅读教案.docx
-
《小学数学生活化的研究》开题报告.docx
-
9A文汽车换挡机构设计指南.docx
-
《柴油机》课程教学设计.docx
-
《股票作手回忆录》读后感精选多篇.docx
-
《新闻纵横》生存类民生新闻的分析报告.docx
-
《科学探索者》丛书参考答案天文学.docx
-
《网络聊天那点事》5人年会晚会搞笑小品剧本台词.docx
-
建筑施工作业安全检查表汇编Word文档下载推荐.docx
-
湖南金太阳届高三开学考试数学试题新高考卷含答案解析Word文档下载推荐.docx
-
推荐七年级上册数学易错题精选及讲解答案Word文档格式.docx
-
海边人像拍摄技巧解析Word文档下载推荐.docx
-
服务网点考评管理制度Word文档下载推荐.docx
-
四年级安全教学总结5篇Word格式文档下载.docx
-
合肥市度七年级上学期第一次月考地理试题B卷Word文件下载.docx
-
党的群众路线教育实践活动个人自查材料文档格式.docx
-
大雁塔导游词Word文档格式.docx
-
花卉学解析Word格式.docx
-
护患沟通座谈会记录本精编版Word文档下载推荐.docx
-
四年级语文下册第三次月考练习题及答案三篇Word文件下载.docx
-
单元检测一 地球与地图Word文件下载.docx
-
台背回填施工方案1Word下载.docx
-
华龙山RK1井补充修改设计Word格式.docx
-
党章知识测试题和答案Word文件下载.docx
-
华中科技大学自动控制原理试题Word文档格式.docx
-
化学反应中的能量变化Word文件下载.docx
-
地方导游基础知识 第一章试题教案资Word格式.docx
