 鲁棒控制-3-H无穷控制理论_精品文档.pdf
鲁棒控制-3-H无穷控制理论_精品文档.pdf
- 文档编号:3211035
- 上传时间:2022-11-20
- 格式:PDF
- 页数:28
- 大小:317.87KB
鲁棒控制-3-H无穷控制理论_精品文档.pdf
《鲁棒控制-3-H无穷控制理论_精品文档.pdf》由会员分享,可在线阅读,更多相关《鲁棒控制-3-H无穷控制理论_精品文档.pdf(28页珍藏版)》请在冰豆网上搜索。
鲁棒控制课堂笔记清华大学自动化系钟宜生第三章第三章H无穷控制理论无穷控制理论3.13.1H问题的提出问题的提出
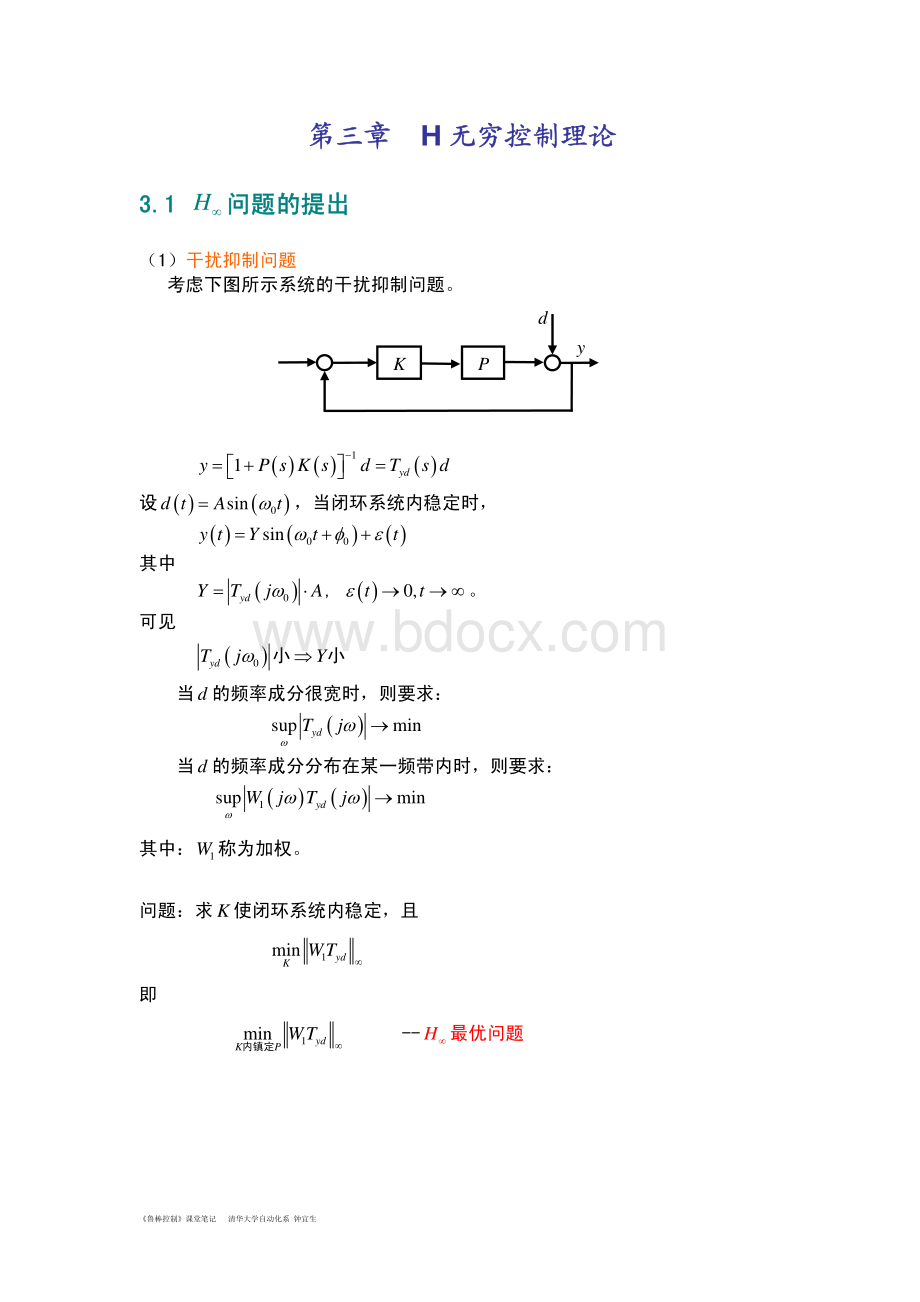
(1)干扰抑制问题考虑下图所示系统的干扰抑制问题。
()()()11ydyPsKsdTsd=+=设()()0sindtAt=,当闭环系统内稳定时,()()()00sinytYtt=+其中()0ydYTjA=,()0,tt。
可见()0ydTjY小小当d的频率成分很宽时,则要求:
()supminydTj当d的频率成分分布在某一频带内时,则要求:
()()1supminydWjTj其中:
1W称为加权。
问题:
求K使闭环系统内稳定,且1minydKWT即1minydKPWT内镇定-H最优问题PKdy鲁棒控制课堂笔记清华大学自动化系钟宜生
(2)稳定裕度问题假设闭环系统稳定,定义:
()()()inf1PjKj=()()inf1PjKj=+若P和K均为真的,其一为严格真的,则01若以开环系统的Nyquist曲线到点()1,0j的距离为稳定裕度,则为得到最大的稳定裕度,应使最大,这等价于:
()()1supmin1PjKj+即1min1PK+问题:
求K使系统内稳定,且1min1KPK+-H最优问题(3)频域鲁棒镇定问题0,PPP=+G稳定,且()(),jrjR其中:
0P为标称对象;()rs是已知的稳定的实有理函数。
鲁棒镇定:
K镇定G,即对,PKG使闭环系统内稳定。
PK0PK+鲁棒控制课堂笔记清华大学自动化系钟宜生设K镇定标称对象0P,则:
()()()101KsPsKs+RH由Nyquist判据或小增益定理知,对于摄动后受控对象0PP=+,闭环系统内稳定的充分条件是:
()()()()1011,jKjPjKj+R那么,K内镇定G中任意P的充分条件是:
()()()()1011,rjKjPjKj+R等价于()()()()10sup11rjKjPjKj+R问题:
求K使标称系统内稳定,且:
()()()()1011rsKsPsKs+-H次优问题说明:
1)上述条件也是必要的;2)可对应有MIMO系统的结果:
1I;3)()s可以是不稳定的,只要()0Ps和()Ps具有相同数目的不稳定极点。
(4)时域鲁棒稳定问题对于系统()()()000xtABCxt=+?
该系统鲁棒稳定iff0A稳定,且()11000CsIAB即()10001CsIAB(5)状态反馈鲁棒镇定问题()101KPK+鲁棒控制课堂笔记清华大学自动化系钟宜生考虑不确定系统()()()xtAxtBut=+?
其中:
0AAA=+;0BBB=+12ABDEEDE=TI问题:
求状态反馈,.uKxst=()()112001EEKsIABKD+-H次优问题(6)跟踪问题12uCrCy=+考虑控制性能指标:
222minminryryuu+=即()2220minryudt+令ryzu=则1212111zrCPCPzrTrCPCP=性能指标等价为:
220minminTzzdtz=设22,1rrrWddd=HP2C+1Cruy鲁棒控制课堂笔记清华大学自动化系钟宜生问题:
求1C和2C使系统内稳定,且:
1222122,1,minsupminzrCCdHdzrCCPzzTWdTW=内稳-H最优问题(7)混合灵敏度控制问题令()()11SPsKs=+称S为灵敏度函数。
则干扰抑制问题为:
求K,镇定标称受控对象P,且使得1minKPWS内镇定若要求干扰对输出的影响达到一定水平之下即可,则可适当选取加权1W,将干扰抑制问题描述为:
求K,镇定标称受控对象P,且使得11WS考虑乘性摄动()1PP=+其中稳定,且()()2,jWjR。
则闭环系统鲁棒稳定的充分必要条件为:
K镇定标称受控对象P,且使得21WT其中()()()()11TPsKsPsKs=+,称T补灵敏度函数。
若综合考虑干扰抑制问题和鲁棒镇定问题,则可考虑混合灵敏度控制问题:
设计控制器K,其镇定标称受控对象P,且使得121WSWTPKdy鲁棒控制课堂笔记清华大学自动化系钟宜生3.2标准标准H控制问题控制问题考虑图所示反馈控制系统。
11122122GGzwwGGGyuu=()()111122221,lzwzGGKIGKGwFGKwTw=+=其中G称为广义受控对象;(),lFGK为关于G和K的(下)线性分式变换(LFT),定义为()()111122221,lFGKGGKIGKG=+H控制的标准问题:
求一真实有理控制器K,使得闭环系统为内稳定,且使得zwT的H范数极小,即minzwTK内稳G-H最优控制或使得闭环系统内稳定,且使得zwT-H次优控制其中是一给定正实数。
1、干扰抑制问题标准问题(),lFGKGKzuyPKdyPKzuydyG鲁棒控制课堂笔记清华大学自动化系钟宜生()1min1KPK+内稳PzdPuydPuukywd=11zPwyPu=()()()111111zwTPKPKPK=+=+问题:
()1minmin1zwKGKPTPK=+内稳内稳2、鲁棒镇定问题标准问题求K,内稳0P,且()1011rKPK+0PK+()()jrj或0PKzuyGrG鲁棒控制课堂笔记清华大学自动化系钟宜生001rzwPyu=()1001zwTrKPK=+问题:
求,K使G内稳定,且1zwT。
3、跟踪问题标准问题求12,CC,使得系统内稳定,且121211min1CPCPWCPCP()()112121211212111122221111011000010CPCPWPWCPCWCCPWPWCCCCPGGKIGKG=+=+=+令000ryWPuIzGyuurWyP=问题:
minzKGT内稳P2C+1CruyG鲁棒控制课堂笔记清华大学自动化系钟宜生4、混合灵敏度控制问题标准问题121WSWT,求一常数矩阵F,使得状态反馈uFx=,满足如下条件(称之为SF条件):
2ABF+为渐近稳定阵且zT其中()()()11122111zTsCDFsIABFBD=+设()()121rankDip=,U和是满足下式的任意矩阵:
1212,rankrankpiimDUUUi=RR选择矩阵()22mimFR使其满足0,TTFFFI=当2im=时,即12D为列满秩时,令0F=。
当120D=时,令,0FFIH=。
设21111TDDI,定义:
()1211111111TTRIDIDDD=+()()()111TTTTFHURU=()1211111111TTFAABIDDDC=+()122111111112TTFBBBIDDDD=+()1122111111111TTFCIDIDDDC=+()12211111TFDBIDD=鲁棒控制课堂笔记清华大学自动化系钟宜生()11221111111112TTFFIDIDDDD=+定理:
对于满足假设()1A的系统()*,满足SF条件的状态反馈矩阵F存在的充要条件是:
(1)21111TDDI和正定矩阵Q,使得Riccati代数方程:
()()TTTTFFFFFFFFFFFFABHFCPPABHFCPDDP+()10TTTTTFFFFFFFFFFFFPBHBPPBBPCIFHFCQ+=存在正定解P。
若上述条件成立,则如下F满足SF条件:
12TTTFFFFFFFFHBPHFC=+假设()2A:
1112112120,0,TTDDCDDI=。
定理:
对于满足假设()()12AA、的系统()*,使SF条件成立的F存在的充分必要条件是:
存在0Q,使得代数Riccati方程:
21122110TTTTAPPAPBBPPBBPCCQ+=存在正定解P。
若上述条件成立,则如下F满足SF条件:
2TFBP=对假设()2A的解释:
2211222zCxDu=+()()1121120TTTTxCuDCxDudt=+()1112121211120TTTTTTTTxCCxuDDuuDCxxCDudt=+()110TTTxCCxuudt=+假设()3A:
11120,0DD=定理:
对于满足假设()()13AA、的系统()*,使SF条件成立的F存在的充分必要条件是:
存在正数0和矩阵0Q,使得Riccati代数方程:
211221110TTTTAPPAPBBPPBBPCCQ+=鲁棒控制课堂笔记清华大学自动化系钟宜生存在正定解P。
当上述和Q存在时,若令212TFBP=则SF条件成立。
证明:
令uFx=,由假设()3A,有()211xABFxBzCx=+=?
因此()()1121zTsCsIABFB=欲证2ABF+为稳定矩阵且()()()()111211212TzzTsTsCsIABFBCsIABFBI=由Riccati代数方程:
211221110TTTTAPPAPBBPPBBPCCQ+=22222111111022TTTTTABBPPPABBPPBBPCCQ+=()()22211110TTTABFPPABFPBBPCCQ+=()()2221111TTTsIABFPPsIABFPBBPQCC+=()()()()()()()()112112112121121112211121121TTTTTTTTTTTBPsIABFBBsIABFPBBsIABFPBBPsIABFBBsIABFQsIABFBBsIABFCCsIABFB+=+()()()()()()11211121121112211121121TTTTTTTTIIBPsIABFBIBPsIABFBBsIABFQsIABFBBsIABFCCsIABFB+=+2ABF+为稳定矩阵()121sIABFB+右乘左乘()12TTBsIABF+鲁棒控制课堂笔记清华大学自动化系钟宜生()()()()()()()11211121121112211111121121212100TTTTTTTIIBPsIABFBIBPsIABFBBsIABFQsIABFBIBPsIABFBIBPsIABFBIIQsIABFBsIAB+=+()()()1211121121TTTFBBsIABFCCsIABFB=+()()()()111211212TzzTsTsCsIABFBCsIABFBI=3.4输出反馈输出反馈H控制控制考察Riccati代数方程0TAXXAXRXQ+=和相应的Hamiton矩阵TARHQA=如果X是上述的Riccati代数方程的唯一对称解,且ARX是稳定阵,则记为()HdomRic,()XRicH=引理:
假设Hamiton矩阵H有如下形式:
TTTABBHCCA=如果,AB是可镇定的,则()HdomRic且()0XRicH=若进而,CA是可检测的,则()0XRicH=考虑输出反馈控制系统:
列满秩列满秩GKzuy()121111222122xAxBBuzCxDDuyCxDDu=+=+=+?
鲁棒控制课堂笔记清华大学自动化系钟宜生121111222122ABBGCDDCDD=1212,mmppnxuzyRRRRR假设:
()1A()2,AB可镇定,()2,CA可检测;()2A12D列满秩,且D.st12DD为正交方阵;21D行满秩,且D?
.st21DD?
为正交方阵;()3A:
2112AjIBCD对R均列满秩;()4A1221AjIBCD对R均行满秩;()5A22


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 鲁棒控制 无穷 控制 理论 精品 文档
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 12处方点评管理规范实施细则_精品文档.doc
12处方点评管理规范实施细则_精品文档.doc
-
12核心制度竞赛题库_精品文档.doc
-
12新医疗技术准入制度_精品文档.docx
-
12月份医务科质控通报_精品文档.doc
-
12项基本公共卫生服务项目_精品文档.docx
-
12月环境卫生学监测方法考核试题_精品文档.doc
-
13双重预防体系风险评价制度及准则_精品文档.doc
-
12种不能忽视的可能的心脏病症状_精品文档.doc
-
13检验科“三基”考试试卷_精品文档.doc
-
14以预防为先导_精品文档.doc
-
12高危药品分级管理制度及目录_精品文档.doc
-
13个病种中医护理方案_精品文档.docx
-
16检验科应对突发事件应急预案_精品文档.docx
-
12急救药品管理制度_精品文档.doc
 17种抗癌药纳入国家基本医疗保险工伤保险和生育保险药品目录_精品文档.xls
17种抗癌药纳入国家基本医疗保险工伤保险和生育保险药品目录_精品文档.xls
-
14医疗器械召回程序_精品文档.wps
-
13医用耗材库房管理制度_精品文档.doc
-
136个幼儿园英语课堂游戏_精品文档.docx
-
12经络彩图_精品文档.doc
-
151颅脑损伤恢复期康复临床路径_精品文档.doc
-
14项护理核心制度_精品文档.doc
-
12检验科化学危险物品使用准则_精品文档.doc
-
15-消化内镜手术分级目录_精品文档.xls
-
13术前讨论记录本模板_精品文档.doc
-
17-下腰痛评估表JOAVAPS_精品文档.doc
-
12项基本公共卫生服务流程图_精品文档.doc
-
13中国髋膝关节置换的现状及展望_精品文档.docx
-
14种最迷惑人的癌症前兆_精品文档.docx
-
17消毒供应室医院感染管理制度_精品文档.doc
-
15附加住院津贴保险条款的费率-人保财险备-健康附号_精品文档.doc
-
19陕西省崔家沟监狱罪犯医疗防疫总站突发事件预案_精品文档.doc
-
20项护理技术操作规程及评分标准_精品文档.doc
-
大学迎新的主持开场白.docx
-
泰州市公需《应对突发事件能力》考核98分.docx
-
中国烟草企业文化建设纲要.doc
-
中央广播电视大学“一村一名大学生计划”财政与金融课程形成性考核册作业答案1-4.doc
-
届苏锡常镇四市高三教学情况调研二英语含答案+mp3听力.docx
-
函数恒成立问题参变分离法.docx
-
春季新学期视导幼儿园汇报多篇.docx
-
金属切削原理与刀具课程标准高职.docx
-
单相接地电容电流的计算分析.docx
-
智慧城市智慧社区设计方案图文精.docx
-
最新花岗岩施工规范.docx
-
天津市房地产经纪服务合同002.docx
-
中国香水行业市场深度调研及发展前景分析报告.docx
-
农村财务治理腐败工作计划与农村财务治理腐败工作计划范文汇编doc.docx
-
毕业论文提纲格式怎么写2篇.docx
-
适合中学生诵读的中华经典诗文篇目.doc
-
适合初中生做的说明文选择题.docx
-
适合初中生读的166本书.docx
-
追梦少年.doc
