 合成孔径雷达的点目标仿真.doc
合成孔径雷达的点目标仿真.doc
- 文档编号:30870041
- 上传时间:2024-09-12
- 格式:DOC
- 页数:14
- 大小:605.50KB
合成孔径雷达的点目标仿真.doc
《合成孔径雷达的点目标仿真.doc》由会员分享,可在线阅读,更多相关《合成孔径雷达的点目标仿真.doc(14页珍藏版)》请在冰豆网上搜索。
SAR的点目标仿真
合成孔径雷达(SAR)的点目标仿真
一.SAR原理简介
合成孔径雷达(SyntheticApertureRadar,简称SAR)是一种高分辨率成像雷达技术。
它利用脉冲压缩技术获得高的距离向分辨率,利用合成孔径原理获得高的方位向分辨率,从而获得大面积高分辨率雷达图像。
SAR回波信号经距离向脉冲压缩后,雷达的距离分辨率由雷达发射信号带宽决定:
,式中表示雷达的距离分辨率,表示雷达发射信号带宽,表示光速。
同样,SAR回波信号经方位向合成孔径后,雷达的方位分辨率由雷达方位向的多谱勒带宽决定:
,式中表示雷达的方位分辨率,表示雷达方位向多谱勒带宽,表示方位向SAR平台速度。
二.SAR的成像模式和空间几何关系
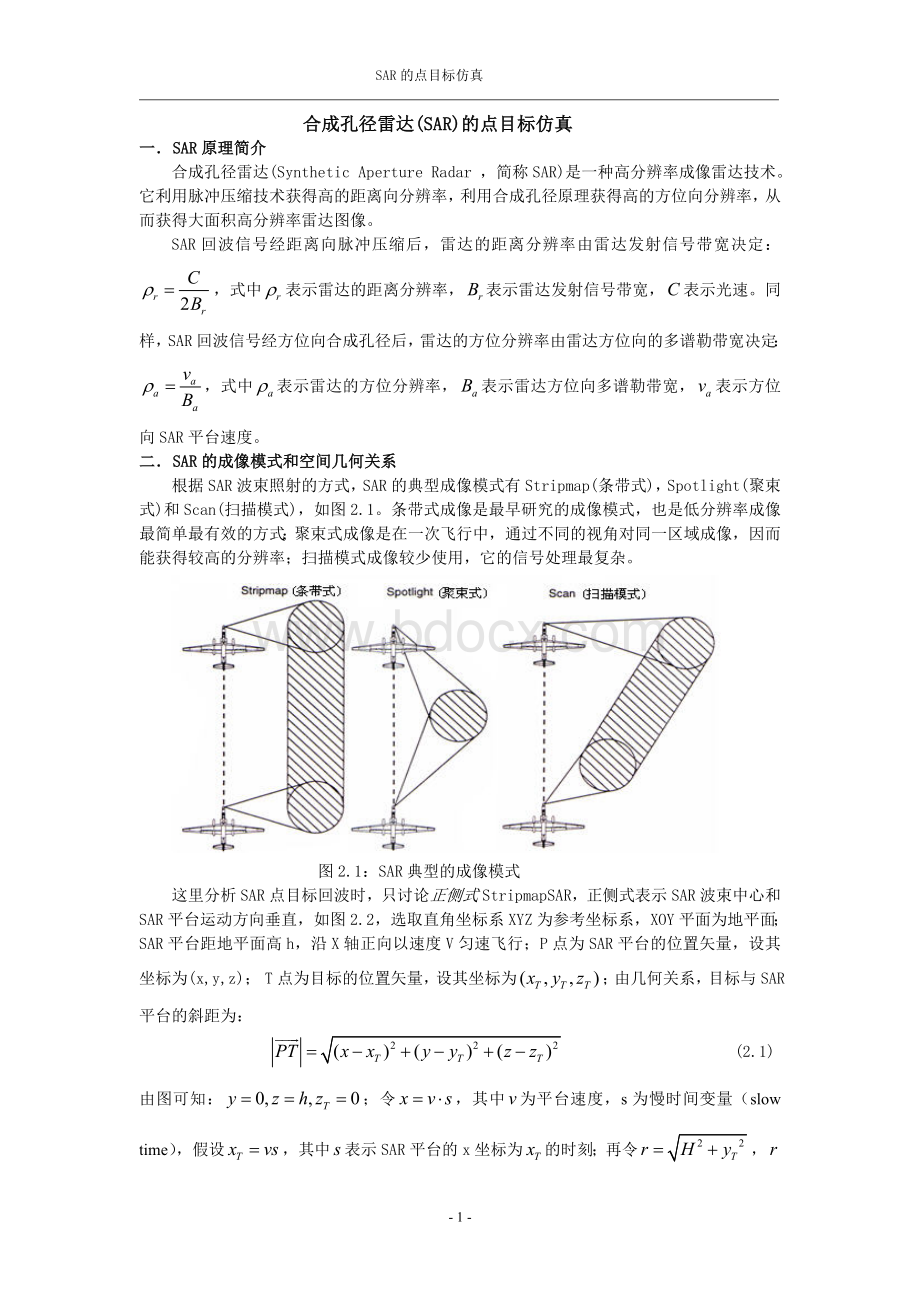
根据SAR波束照射的方式,SAR的典型成像模式有Stripmap(条带式),Spotlight(聚束式)和Scan(扫描模式),如图2.1。
条带式成像是最早研究的成像模式,也是低分辨率成像最简单最有效的方式;聚束式成像是在一次飞行中,通过不同的视角对同一区域成像,因而能获得较高的分辨率;扫描模式成像较少使用,它的信号处理最复杂。
图2.1:
SAR典型的成像模式
这里分析SAR点目标回波时,只讨论正侧式StripmapSAR,正侧式表示SAR波束中心和SAR平台运动方向垂直,如图2.2,选取直角坐标系XYZ为参考坐标系,XOY平面为地平面;SAR平台距地平面高h,沿X轴正向以速度V匀速飞行;P点为SAR平台的位置矢量,设其坐标为(x,y,z);T点为目标的位置矢量,设其坐标为;由几何关系,目标与SAR平台的斜距为:
(2.1)
由图可知:
;令,其中为平台速度,s为慢时间变量(slowtime),假设,其中表示SAR平台的x坐标为的时刻;再令,表示目标与SAR的垂直斜距,重写2.1式为:
(2.2)
就表示任意时刻时,目标与雷达的斜距。
一般情况下,,于是2.2式可近似写为:
(2.3)
可见,斜距是的函数,不同的目标,也不一样,但当目标距SAR较远时,在观测带内,可近似认为不变,即。
图2.2:
空间几何关系(a)正视图(b)侧视图
图2.2(a)中,表示合成孔径长度,它和合成孔径时间的关系是。
(b)中,为雷达天线半功率点波束角,为波束轴线与Z轴的夹角,即波束视角,为近距点距离,为远距点距离,W为测绘带宽度,它们的关系为:
(2.4)
三.SAR的回波信号模型
SAR在运动过程中,以一定的PRT(PulseRepititionTime,脉冲重复周期)发射和接收脉冲,天线波束照射到地面上近似为一矩形区域,如图2.2(a),区域内各散射元(点)对入射波后向散射,这样,发射脉冲经目标和天线方向图的调制,携带目标和环境信息形成SAR回波。
从时域来看,发射和接收的信号都是一时间序列。
图3.1:
SAR发射和接收信号
图3.1表示SAR发射和接收信号的时域序列。
发射序列中,为chirp信号持续时间,下标表示距离向(Range);PRT为脉冲重复周期;接收序列中,表示发射第个脉冲时,目标回波相对于发射序列的延时;阴影部分表示雷达接收机采样波门,采样波门的宽度要保证能罩住测绘带内所有目标的回波。
雷达发射序列的数学表达式为:
(3.1)
式中,表示矩形信号,为距离向chirp信号的调频斜率,为载频。
雷达回波信号由发射信号波形,天线方向图,斜距,目标RCS,环境等因素共同决定,若不考虑环境因素,则单点目标雷达回波信号可写成:
(3.2)
式中,为点目标的雷达散射截面,表示点目标天线方向图双向幅度加权,表示载机发射第n个脉冲时,电磁波在雷达与目标之间传播的双程时间,,代入3.2式
(3.3)
3.3式就是单点目标回波信号模型。
其中,为chirp分量,它决定距离向分辨率,为doppler分量,它决定方位向分辨率。
距离向变量远大于方位向变量t(典型相差量级),于是一般可以假设SAR满足“停-走-停”模式,即SAR在发射和接收一个脉冲信号中间,载机未发生运动。
为了理论分析方便,称为慢时间变量(slowtime),称t为快时间变量(fasttime)于是,一维回波信号可以写成二维形式,正交解调去除载波后,单点目标的回波可写成:
(3.3)
图3.2:
单点目标回波二维分布示意图
在方位向(慢时间域)是离散的,,其中V是SAR的速度,是0时刻目标在参考坐标系中的x坐标。
为了作数字信号处理,在距离向(快时间域)也要采样,假设采样周期为Tr,则,如图3.2,方位向发射N个脉冲,距离向采样得到M个样值点,则SAR回波为一矩阵,K个理想点目标的回波经采样后的表达式为:
(3.4)
上式用Matlab语言可表示为:
%%***************************************************************************
%%Generatetherawsignaldata
K=Ntarget;%numberoftargets
N=Nslow;%numberofvectorinslow-timedomain
M=Nfast;%numberofvectorinfast-timedomain
T=Ptarget;%positionoftargets
Srnm=zeros(N,M);
fork=1:
1:
K
sigma=T(k,3);
Dslow=sn*V-T(k,1);
R=sqrt(Dslow.^2+T(k,2)^2+H^2);
tau=2*R/C;
Dfast=ones(N,1)*tm-tau'*ones(1,M);
phase=pi*Kr*Dfast.^2-(4*pi/lambda)*(R'*ones(1,M));
Srnm=Srnm+sigma*exp(j*phase).*(0 end %%*************************************************************************** 四.SAR的信号系统模型 从信号与系统的角度看,SAR回波可看作目标的散射特性通过一个二维线性系统的输出。 点目标的信号与系统模型如图4.1: 图4.1: 点目标信号与系统模型 模型的数学表达式为: (4.1) 式中,表示点目标的散射特性,表示等效系统,设为发射的chirp信号,则: (4.2) 4.2式表明只在维是线性时不变(LTI)的,在维是时变的,相同的,不同的,响应不一样。 但通常情况下可近似认为不变,即,这时,系统等效为一个二维LTI系统。 五.点目标SAR的成像处理算法仿真 SAR的回波数据不具有直观性,不经处理人无法理解它,如图5.1。 从原理上讲,SAR成像处理的过程是从回波数据中提取目标区域散射系数的二维分布,本质上是一个二维相关处理过程,因此最直接的处理方法是对回波进行二维匹配滤波,但其运算量很大,再加上SAR的数据率本来就高,这使得实时处难于实现。 通常,可以把二维过程分解成距离向和方位向两个一维过程,Range-DopperAlgorithm(简称RD算法)就是采用这种思想的典型算法,这里也只讨论RD算法。 图5.1: SAR回波数据(a)未经处理(b)处理后 RD算法通过距离迁移(RangeMigration)矫正,消除距离和方位之间的耦合。 在满足聚焦深度的前提小,将成像处理分解成两个一维的LTI系统进行相关处理,并采用频域快速相关算法提高了速度。 RD算法已非常成熟,并成为衡量其它算法优劣的标准。 RD算法典型的数字处理流程如图5.2。 图5.2: Range-Dopper算法流程 ●预处理 这是对SAR回波处理的第一步,一般在SAR平台(卫星,飞机)上实时处理,包括解调和数字化。 雷达信号的载频较高(~GHz),不宜直接采样数字化处理,常常通过正交解调方式解调出基带信号,再对基带信号(~MHz)采样数字化,然后存储或传到地面做进一步处理。 采样后的数据常采用矩阵形式存储,假设方位向发射(采样)N个脉冲,距离向采样得到M每个采样值(图3.2),则待处理数据是一个的矩阵,如图5.3。 实际处理时,要在方位向上加窗截断,因此,在方位向上的开始和结束的一段数据(图中影阴区所示)是不充分的,对应的长度均为,表示SAR的合成孔径长度。 仿真时,这个数据阵是程序根据3.4式产生的。 图5.3: 待处理数据 ●距离压缩 距离向信号是典型的Chirp信号,相关算法是在频域利用FFT进行的。 Matlab语句为: Refr=exp(j*pi*Kr*tr.^2).*(0 Sr=ifty(fty(Srnm).*(ones(N,1)*conj(fty(Refr)))); 和分别是Chirp信号的调频斜率和脉冲持续时间,Refr表示参考信号,fty,ifty是对矩阵的行(对应距离向)进行FFT和IFFT运算的子程序。 例如,fty的代码为: %%FFTinrowofmatrix functionfs=fty(s); fs=fftshift(fft(fftshift(s.'))).'; ●距离迁移矫正 距离迁移是SAR信号处理中必然出现的现象,它的大小随系统参数不同而变化,并不总需要补偿。 点目标仿真时,可以先不考虑。 ●方位压缩 方位向的处理是SAR成像处理算法最核心的部分。 正侧式点目标(图2.2)情况下,回波经距离压缩后在方位向也是一Chirp信号,因此其压缩处理同距离压缩处理类似,只是压缩因子不同。 仿真中,调频斜率已知,因此不需要进行Doppler参数估计。 ●SAR参数 SAR平台: 水平速度V=100m/s 高度H=5000m 天线等效孔径D=4m SAR平台与测绘带的垂直斜距R0=11180m(计算结果) 发射信号: 载波频率=1GHz Chirp信号持续时间=5us Chirp信号调频带宽=30MHz Chirp信号调频斜率=(计算结果) 脉冲重复频率PRF=57.6Hz(计算结果) Doppler调频带宽=50Hz(计算结果) Doppler调频斜率=-5.96(计算结果) 分辨率: 距离向分辨率DY=5m 方位向分辨率DX=2m 目标位置: 距离向Y=[Yc-Y0,Yc+Y0]=[9500,10500]m 方位向X=[Xmin,Xmax]=[0,50]m 目标个数Ntarget=3 目标位置矩阵: 格式[x坐标,y坐标,目标散射系数] Ptarget=[Xmin,Yc,1 Xmin,Yc+10*DY,1 Xmin+20*DX,Yc+50*DY,1] stripmapSAR.m程序(见附录)实现了仿真功能,图5.4到图5.7为仿真结果。 运行程序,在CommandWindow中列出了仿真的参数: Parameters: SamplingRateinfast-timedomain 3.0996 SamplingNumberinfast-timedomain 1024 SamplingRateinslow-timedomain 1.1525 SamplingNumberinslow-timedomain 512 RangeResolution 5 Cross-rangeResolution 2 SARintegrationlength 838.5255 Positionoftargets 0100001 0100501 40102501 当然,这些参数可以改变以得到不同的结果,但值得注意的是,采样点数不宜过大,否则数据量过大将导致程序运行时间过长,甚至计算机因内存耗尽而死机。 本例采用的是5121024个点。 图5.4: SAR的点目标仿真结果 图5.5: 两点目标的回波仿真3D图 图5.6: 两点目标距离向压缩后的3D图 图5.7: 两点目标距离向和方位向压缩后的3D图 图5.8: 两点目标压缩后的3dB等高线图 附录: SAR的点目标仿真Matlab程序 主程序: stripmapSAR.m %%======================================================== clear;clc;closeall; %%======================================================== %%Parameter--constant C=3e8;%propagationspeed %%Parameter--radarcharacteristics Fc=1e9;%carrierfrequency1GHz lambda=C/Fc;%wavelength %%Parameter--targetarea Xmin=0;%targetareainazimuthiswithin[Xmin,Xmax] Xmax=50; Yc=10000;%centerofimagedarea Y0=500;%targetareainrangeiswithin[Yc-Y0,Yc+Y0] %imagedwidth2*Y0 %%Parameter--orbitalinformation V=100;%SARvelosity100m/s H=5000;%height5000m R0=sqrt(Yc^2+H^2); %%Parameter--antenna D=4;%antennalengthinazimuthdirection Lsar=lambda*R0/D;%SARintegrationlength Tsar=Lsar/V;%SARintegrationtime %%Parameter--slow-timedomain Ka=-2*V^2/lambda/R0;%dopplerfrequencymodulationrate Ba=abs(Ka*Tsar);%dopplerfrequencymodulationbandwidth PRF=Ba;%pulserepititionfrequency PRT=1/PRF;%pulserepititiontime ds=PRT;%samplespacinginslow-timedomain Nslow=ceil((Xmax-Xmin+Lsar)/V/ds);%samplenumberinslow-timedomain Nslow=2^nextpow2(Nslow);%forfft sn=linspace((Xmin-Lsar/2)/V,(Xmax+Lsar/2)/V,Nslow);%discretetimearrayinslow-timedomain PRT=(Xmax-Xmin+Lsar)/V/Nslow;%refresh PRF=1/PRT; ds=PRT; %%Parameter--fast-timedomain Tr=5e-6;%pulseduration10us Br=30e6;%chirpfrequencymodulationbandwidth30MHz Kr=Br/Tr;%chirpslope Fsr=3*Br;%samplingfrequencyinfast-timedomain dt=1/Fsr;%samplespacinginfast-timedomain Rmin=sqrt((Yc-Y0)^2+H^2); Rmax=sqrt((Yc+Y0)^2+H^2+(Lsar/2)^2); Nfast=ceil(2*(Rmax-Rmin)/C/dt+Tr/dt);%samplenumberinfast-timedomain Nfast=2^nextpow2(Nfast);%forfft tm=linspace(2*Rmin/C,2*Rmax/C+Tr,Nfast);%discretetimearrayinfast-timedomain dt=(2*Rmax/C+Tr-2*Rmin/C)/Nfast;%refresh Fsr=1/dt; %%Parameter--resolution DY=C/2/Br;%rangeresolution DX=D/2;%cross-rangeresolution %%Parameter--pointtargets Ntarget=2;%numberoftargets %format[x,y,reflectivity] Ptarget=[Xmin,Yc,1%positionoftargets Xmin,Yc+10*DY,1 Xmin+20*DX,Yc+50*DY,1]; disp('Parameters: ') disp('SamplingRateinfast-timedomain');disp(Fsr/Br) disp('SamplingNumberinfast-timedomain');disp(Nfast) disp('SamplingRateinslow-timedomain');disp(PRF/Ba) disp('SamplingNumberinslow-timedomain');disp(Nslow) disp('RangeResolution');disp(DY) disp('Cross-rangeResolution');disp(DX) disp('SARintegrationlength');disp(Lsar) disp('Positionoftargets');disp(Ptarget) %%======================================================== %%Generatetherawsignaldata K=Ntarget;%numberoftargets N=Nslow;%numberofvectorinslow-timedomain M=Nfast;%numberofvectorinfast-timedomain T=Ptarget;%positionoftargets Srnm=zeros(N,M); fork=1: 1: K sigma=T(k,3); Dslow=sn*V-T(k,1); R=sqrt(Dslow.^2+T(k,2)^2+H^2); tau=2*R/C; Dfast=ones(N,1)*tm-tau'*ones(1,M); phase=pi*Kr*Dfast.^2-(4*pi/lambda)*(R'*ones(1,M)); Srnm=Srnm+sigma*exp(j*phase).*(0


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 合成孔径雷达 目标 仿真
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 党组织、党员联系服务师生工作制度.docx
党组织、党员联系服务师生工作制度.docx
 物流与供应链管理 第七章 供应链综合计划.pptx
物流与供应链管理 第七章 供应链综合计划.pptx
-
民族团结教案doc格式.docx
-
民族团结教案doc格式.docx
-
中国象棋ppt模板.pptx
-
设备质量保证措施.docx
-
电力公司招聘行政能力测试试题及解析.docx
 回弹仪检测多孔砖砖强度计算表.xls
回弹仪检测多孔砖砖强度计算表.xls
-
汽车理论1.3.doc
-
电动汽车充换电站项目商业计划书.doc
-
幼儿园指南试题及答案.doc
-
护理教案模板.doc
-
资料台账表格.xlsx
-
红军长征的历史叙述是怎样形成的.docx
-
冷库工程合同.docx
-
部编版五年级上册语文课堂作业本答案(全).docx
-
《网络综合布线》说课稿.doc
-
材料进场,见证取样及检验制度.docx
-
20章--瓦斯综合利用.doc
-
[原创]STP保温板屋面及外墙保温施工技术方案.doc
-
隧道开挖作业台车计算书.docx
-
《减法的初步认识》教学设计.doc
-
教导处工作计划.docx
-
电机学第五版课后答案汤蕴璆完整版.docx
-
同仁堂案例成功启示.docx
-
经典钣金结构设计规范.doc
-
计算机各种进制转换练习题(附答案).doc
-
市场营销教学案例分析.docx
-
服装厂质量管理制度.docx
-
中职试验教材应用文写作(高教版_王崇国编)电子教案【全】.doc
-
控烟考评奖惩制度、标准、记录表.doc
-
小学生“学宪法-讲宪法”活动知识竞赛题库(含答案).docx
-
信息系统管理工程师考试大纲.docx
-
宣传部年度总结.docx
-
人教版中考化学一轮复习专题六 溶液及溶解度曲线讲练含答案.docx
-
沙发工艺标准.docx
-
小企业财务会计与财务管理知识分析准则.docx
-
学习万科飞检有感.docx
-
苏教版一年级数学下册第四单元加法和减法一教案.docx
-
学校岗位职责大全.docx
-
消防安全专项检查记录表.docx
-
湘潭华天大酒店员工培训方案.docx
-
生物化学试题及答案15副本讲解.docx
-
五年级语文上册本册综合 作文课件 新人教版.docx
-
小学生自我评价的特点.docx
-
五年级下学期体育教学计划和教案.docx
-
市政道路工程施工合同范本新整理版精选.docx
-
生产设备转让协议.docx
-
水泥基渗透结晶型防水涂料施工方法.docx
-
危险废物管理计划备案表.docx
-
英语必修五U1文件11.docx
