 一种含非线性晃动及大柔性附件航天器姿态复合控制方法.pdf
一种含非线性晃动及大柔性附件航天器姿态复合控制方法.pdf
- 文档编号:30839520
- 上传时间:2024-01-30
- 格式:PDF
- 页数:16
- 大小:1.19MB
一种含非线性晃动及大柔性附件航天器姿态复合控制方法.pdf
《一种含非线性晃动及大柔性附件航天器姿态复合控制方法.pdf》由会员分享,可在线阅读,更多相关《一种含非线性晃动及大柔性附件航天器姿态复合控制方法.pdf(16页珍藏版)》请在冰豆网上搜索。
(19)国家知识产权局(12)发明专利申请(10)申请公布号(43)申请公布日(21)申请号202310213431.5(22)申请日2023.03.07(71)申请人北京理工大学地址100081北京市海淀区中关村南大街5号(72)发明人刘峰王世元岳宝增(74)专利代理机构北京正阳理工知识产权代理事务所(普通合伙)11639专利代理师王松(51)Int.Cl.B64G1/24(2006.01)(54)发明名称一种含非线性晃动及大柔性附件航天器姿态复合控制方法(57)摘要本发明公开的一种含非线性晃动及大柔性附件航天器姿态复合控制方法,属于航天器控制技术领域。
本发明实现方法为:
通过Te表征航天器在轨运行时受到各种非保守干扰力矩;采用欧拉四元数描述航天器主体任意角度姿态运动;采用假设模态离散化方法描述1m个柔性附件的弹性振动;采用拆分变量技术改进液体晃动等效球摆模型的运动描述;建立带大型柔性附件充液航天器大范围运动动力学模型;对航天器姿态动力学模型线性化;根据Lyaponuv稳定性定理设计的充液柔性航天器输出反馈姿态控制律;基于充液柔性航天器输出反馈姿态控制律和欧拉四元数输入指令,设计的充液柔性航天器输入成型输出反馈复合姿态控制器,进而实现振动主动抑制,提高航天器姿态复合控制精度。
权利要求书4页说明书8页附图3页CN116424575A2023.07.14CN116424575A1.一种含非线性晃动及大柔性附件航天器姿态复合控制方法,其特征在于:
包括以下步骤,步骤1、应用混合坐标下的拉格朗日方程建立带大型柔性附件充液航天器大范围运动动力学模型;在带大型柔性附件充液航天器建模过程中,以Te表征航天器受到的各种非保守干扰力矩,重力梯度力矩Tg为唯一非保守干扰力矩;采用欧拉四元数描述航天器主体任意角度姿态运动;采用假设模态离散化方法描述1m个柔性附件的弹性振动,实现高效简洁地表征柔性附件的弹性振动;采用拆分变量技术改进液体晃动等效球摆模型的运动描述,实现明确表征液体推进剂相对于1n号储箱的整体性刚体运动与非线性晃动,所述非线性晃动包括有限幅横向晃动和旋转晃动;步骤2、对步骤1得到的航天器姿态动力学模型线性化,得到表观非耦合的姿态动力学模型;在选取合适的充液柔性航天器系统状态空间内Lyaponuv函数中引入误差变量,从而对相关相关状态变量进行状态估计;应用Lyaponuv稳定性理论设计充液柔性航天器输出反馈姿态控制律,保证航天器姿态运动以及帆板振动渐近稳定;步骤3、根据帆板的主振动模态,设计相应的ZVD成型器脉冲序列,将ZVD成型器脉冲序列依次与目标姿态四元数进行卷积运算,得到整型后的欧拉四元数输入指令;步骤4、结合步骤2中得到的充液柔性航天器输出反馈姿态控制律和步骤3中得到的欧拉四元数输入指令,设计的充液柔性航天器输入成型输出反馈复合姿态控制器;通过充液柔性航天器输入成型输出反馈复合姿态控制器保证航天器姿态运动以及帆板振动渐近稳定,实现带大型柔性附件充液航天器在轨大范围姿态平稳机动及柔性附件振动主动抑制控制。
2.如权利要求1所述的一种含非线性晃动及大柔性附件航天器姿态复合控制方法,其特征在于:
步骤1实现方法为,步骤1.1、定义航天器系统各部分的运动,包括航天器主刚体平台质心相对于惯性参考系的位置和速度、主刚体平台相对于惯性参考系的转动角速度、姿态控制三轴反作用轮相对于惯性参考系的转动角速度、柔性附件上任一质量微元相对于惯性参考系的位置和速度、液体晃动等效球摆模型集中质量相对于惯性参考系的位置和速度;步骤1.2、推导航天器系统的总动能和总势能;航天器系统总动能表示成如下矩阵计算式航天器系统总势能包括柔性附件振动时储存的应变能Vsp和液体晃动时等效球摆的重力势能Vp两部分;步骤1.3、航天器系统运动的拉格朗日函数为系统总动能与系统势能之差,所述表征航天器系统总能量的拉格朗日函数L为LT(Vsp+Vp)
(2)航天器角速度下的拉格朗日方程为广义坐标下描述帆板振动和球摆运动的拉格朗日方程分别为权利要求书1/4页2CN116424575A2将
(1)带入
(2)后得到航天器系统拉格朗日函数的具体表达式,再将
(2)分别代入到(3)、(4)、(5)所述的描述航天器系统各部分运动的拉格朗日方程中,进而推导出带单个部分充液球形储箱及对称安装的两块柔性太阳能帆板的航天器姿态动力学模型如公式(6)所示式中:
Imb代表航天器主体关于航天器本体系的转动惯量矩阵,所述航天器主体包括航天器主刚体、两块太阳帆板和等效球摆等三部分;是航天器角速度矢量在航天器本体系下表示的坐标矩阵,是的时间导数;P是第1块太阳帆板振动与航天器姿态运动之间的耦合系数矩阵;q是第1块太阳帆板振动的前3阶振动模态坐标组成的广义坐标矩阵;Q是球摆运动与航天器姿态运动之间的耦合系数矩阵;是由描述等效球摆模型相对于储箱的运动的欧拉角组成的广义坐标矩阵;Iw是三轴反作用轮关于航天器本体系的转动惯量矩阵;是三轴反作用轮相对角速度矢量在本体系下表示的坐标矩阵;表示的反对称对偶矩阵;Tg是航天器受到的重力梯度力矩;Msp是一块太阳帆板振动的模态质量矩阵;Ksp是一块太阳帆板振动的模态刚度矩阵;Mp是球摆运动的广义质量矩阵;Cp是球摆运动的等效阻尼系数矩阵;Kp是等效球摆运动的广义刚度矩阵;是球摆模型等效液体刚体运动的刚体坐标;Tw是姿态控制三轴反作用轮输出的控制反力矩在航天器本体系下表示的坐标矩阵。
3.如权利要求2所述的一种含非线性晃动及大柔性附件航天器姿态复合控制方法,其特征在于:
步骤2实现方法为,步骤2.1、针对步骤1中建立的全耦合形式的充液柔性航天器姿态动力学模型(6);然后,由于柔性帆板振动和液体晃动都是小幅运动,忽略二阶以上小量对该航天器姿态动力学模型进行直接线性化,并采用如下变量代换得到便于后续设计输出反馈姿态控制律的表观非耦合形式的姿态动力学模型权利要求书2/4页3CN116424575A3步骤2.2、由于实际航天器为欠观测系统,通过在航天器系统状态空间内Lyaponuv函数中引入如公式(4)所示误差变量,对与帆板振动和液体晃动相关的状态变量进行状态估计步骤2.3、选取如下该充液柔性航天器系统状态空间内Lyaponuv函数式中:
B1和B3是待定的对称正定矩阵;B2和B4是待定的对称半正定矩阵;并根据Lyaponuv稳定性定理,设计满足Lyaponuv函数的时间导数具有全局半负定性时的帆板振动动力学估计器、液体晃动动力学估计器和控制力矩,并根据所述帆板振动动力学估计器、液体晃动动力学估计器和控制力矩设计的充液柔性航天器输出反馈姿态控制律,得到充液柔性航天器输出反馈姿态控制律如公式(6)所示:
式中:
En是n阶单位矩阵;0mn是mn维零矩阵;kp和kd是控制增益系数;F1和F2的具体表达式为权利要求书3/4页4CN116424575A4式(6)中,第一个分式是对帆板振动的动力学估计;而第二个分式是对液体晃动的动力学估计;第三个分式则是姿态控制反作用轮输出的控制反力矩,第三个分式是以航天器姿态及角速度传感器测得的输出信号作为反馈信息而计算得到的。
4.如权利要求3所述的一种含非线性晃动及大柔性附件航天器姿态复合控制方法,其特征在于:
步骤3实现方法为,根据帆板的主振动模态,设计相应的ZVD成型器脉冲序列,根据公式(7)将ZVD成型器脉冲序列依次与目标姿态四元数进行卷积运算,得到整型后的欧拉四元数输入指令;将其与目标姿态四元数进行卷积运算,得到整型后的欧拉四元数输入指令。
权利要求书4/4页5CN116424575A5一种含非线性晃动及大柔性附件航天器姿态复合控制方法技术领域0001本发明涉及一种含非线性晃动及大柔性附件航天器姿态复合控制方法,属于航天器控制技术领域。
背景技术0002带有大型柔性附件和充液储箱的航天器动力学与控制问题一直是航天领域研究的热点和难点。
随着空间任务需求不断提升,对航天器总体构型优化设计、控制能力提出了更高要求,国内外航天工程实践正愈发热切地关注储箱内液体晃动引发的航天器动力学与控制问题。
0003现阶段航天工程实践中,为削弱推进剂储箱内液体晃动对航天器动力学及控制系统的干扰,推进剂储箱均采用防晃设计对储箱内液体晃动进行被动抑制,如选择囊式、膜片式及金属膜盒式等新式储箱存储推进剂,这些储箱与推进剂相容性差;又如储箱内部安装机械障板、分离式隔板等防晃装置。
储箱被动防晃设计通常会增加无效工质,一定程度上牺牲了推进剂加注量。
此外,对于大型储箱,被动防晃措施对液体晃动的抑制效果劣于小型储箱。
另一方面,我国航天工程实践仍停留在采用弹簧质量阻尼器或单摆两类传统的线性模型来处理航天器储箱内液体晃动问题,欠缺对液体大幅晃动等效力学模型的系统性研究、验证和应用。
在液体晃动线性模型适用条件下,充液柔性航天器控制多采用比较保守的连续多次小范围的、慢速的机动方式,虽然有利于避免储箱内液体发生剧烈晃动而引起的突出问题,但不能从根本上解决液体晃动带来的航天器控制问题。
0004因此,为了满足航天工程迅速发展的迫切需求,目前亟待开展同时含液体非线性晃动和大型柔性附件振动的航天器刚液柔控耦合动力学与控制方法研究。
发明内容0005本发明的主要目的是提供一种含非线性晃动及大柔性附件航天器姿态复合控制方法,能够实现带大型柔性附件充液航天器在轨大范围姿态平稳机动及柔性附件振动主动抑制控制,提高航天器姿态复合控制精度。
0006本发明的目的是通过下述技术方案实现的:
0007本发明公开的一种含非线性晃动及大柔性附件航天器姿态复合控制方法,包括以下步骤:
0008步骤1、应用混合坐标下的拉格朗日方程建立带大型柔性附件充液航天器大范围运动动力学模型。
在带大型柔性附件充液航天器建模过程中,以Te表征航天器受到的各种非保守干扰力矩,重力梯度力矩Tg为唯一非保守干扰力矩;采用欧拉四元数描述航天器主体任意角度姿态运动;采用假设模态离散化方法描述1m个柔性附件的弹性振动,实现高效简洁地表征柔性附件的弹性振动;采用拆分变量技术改进液体晃动等效球摆模型的运动描述,实现明确表征液体推进剂相对于1n号储箱的整体性刚体运动与非线性晃动,所述非线性晃动包括有限幅横向晃动和旋转晃动。
说明书1/8页6CN116424575A60009步骤1.1、定义航天器系统各部分的运动,包括航天器主刚体平台质心相对于惯性参考系的位置和速度、主刚体平台相对于惯性参考系的转动角速度、姿态控制三轴反作用轮相对于惯性参考系的转动角速度、柔性附件上任一质量微元相对于惯性参考系的位置和速度、液体晃动等效球摆模型集中质量相对于惯性参考系的位置和速度。
0010步骤1.2、推导航天器系统的总动能和总势能。
0011航天器系统总动能表示成如下矩阵计算式00120013航天器系统总势能包括柔性附件振动时储存的应变能Vsp和液体晃动时等效球摆的重力势能Vp两部分。
0014步骤1.3、航天器系统运动的拉格朗日函数为系统总动能与系统势能之差,所述表征航天器系统总能量的拉格朗日函数L为0015LT(Vsp+Vp)
(2)0016航天器角速度下的拉格朗日方程为00170018广义坐标下描述帆板振动和球摆运动的拉格朗日方程分别为001900200021将
(1)带入
(2)后得到航天器系统拉格朗日函数的具体表达式,再将
(2)分别代入到(3)、(4)、(5)所述的描述航天器系统各部分运动的拉格朗日方程中,进而推导出带单个部分充液球形储箱及对称安装的两块柔性太阳能帆板的航天器姿态动力学模型如公式(6)所示00220023式中:
Imb代表航天器主体关于航天器本体系的转动惯量矩阵,所述航天器主体包括航天器主刚体、两块太阳帆板和等效球摆等三部分;是航天器角速度矢量在航天器本体系下表示的坐标矩阵,是的时间导数;P是第1块太阳帆板振动与航天器姿态运动之间的耦合系数矩阵;q是第1块太阳帆板振动的前3阶振动模态坐标组成的广义坐标矩阵;Q是球摆运动与航天器姿态运动之间的耦合系数矩阵;是由描述等效球摆模型相对于储箱的运动的欧拉角组成的广义坐标矩阵;Iw是三轴反作用轮关于航天器本体系的转动惯量矩阵;是三轴反作用轮相对角速度矢量在本体系下表示的坐标矩阵;表示的反对称对说明书2/8页7CN116424575A7偶矩阵;Tg是航天器受到的重力梯度力矩;Msp是一块太阳帆板振动的模态质量矩阵;Ksp是一块太阳帆板振动的模态刚度矩阵;Mp是球摆运动的广义质量矩阵;Cp是球摆运动的等效阻尼系数矩阵;Kp是等效球摆运动的广义刚度矩阵;是球摆模型等效液体刚体运动的刚体坐标;Tw是姿态控制三轴反作用轮输出的控制反力矩在航天器本体系下表示的坐标矩阵。
0024步骤2、对步骤1得到的航天器姿态动力学模型线性化,得到表观非耦合的姿态动力学模型;在选取合适的充液柔性航天器系统状态空间内Lyaponuv函数中引入误差变量,从而对相关状态变量进行状态估计;应用Lyaponuv稳定性理论设计充液柔性航天器输出反馈姿态控制律,保证航天器姿态运动以及帆板振动渐近稳定。
0025步骤2.1、针对步骤1中建立的全耦合形式的充液柔性航天器姿态动力学模型(6);然后,由于柔性帆板振动和液体晃动都是小幅运动,忽略二阶以上小量对该航天器姿态动力学模型进行直接线性化,并采用如下变量代换00260027得到便于后续设计输出反馈姿态控制律的表观非耦合形式的姿态动力学模型00280029步骤2.2、由于实际航天器为欠观测系统,通过在航天器系统状态空间内Lyaponuv函数中引入如公式(4)所示误差变量,对与帆板振动和液体晃动相关的状态变量进行状态估计00300031步骤2.3、选取如下该充液柔性航天器系统状态空间内Lyaponuv函数00320033式中:
B1和B3是待定的对称正定矩阵;B2和B4是待定的对称半正定矩阵。
0034并根据Lyaponuv稳定性定理,设计满足Lyaponuv函数的时间导数具有全局半负定性时的帆板振动动力学估计器、液体晃动动力学估计器和控制力矩,并根据所述帆板振动说明书3/8页8CN116424575A8动力学估计器、液体晃动动力学估计器和控制力矩设计的充液柔性航天器输出反馈姿态控制律,得到充液柔性航天器输出反馈姿态控制律如公式(6)所示:
00350036式中:
En是n阶单位矩阵;0mn是mn维零矩阵;kp和kd是控制增益系数;F1和F2的具体表达式为003700380039式(6)中,第一个分式是对帆板振动的动力学估计;而第二个分式是对液体晃动的动力学估计;第三个分式则是姿态控制反作用轮输出的控制反力矩,第三个分式是以航天器姿态及角速度传感器测得的输出信号作为反馈信息而计算得到的。
0040步骤3、根据帆板的主振动模态,设计相应的ZVD成型器脉冲序列,将ZVD成型器脉冲序列依次与目标姿态四元数进行卷积运算,得到整型后的欧拉四元数输入指令。
00410042将其与目标姿态四元数进行卷积运算,得到整型后的欧拉四元数输入指令。
0043步骤4、结合步骤2中得到的充液柔性航天器输出反馈姿态控制律和步骤3中得到的欧拉四元数输入指令,设计的充液柔性航天器输入成型输出反馈复合姿态控制器。
通过充液柔性航天器输入成型输出反馈复合姿态控制器保证航天器姿态运动以及帆板振动渐近稳定,进而实现带大型柔性附件充液航天器在轨大范围姿态平稳机动及柔性附件振动主动抑制控制。
0044有益效果:
00451、本发明公开的一种含非线性晃动及大柔性附件航天器姿态复合控制方法,通过Te表征航天器在轨运行时受到各种非保守干扰力矩;采用欧拉四元数描述航天器主体任意角度姿态运动;采用假设模态离散化方法描述1m个柔性附件的弹性振动,实现高效简洁地表征柔性附件的弹性振动;采用拆分变量技术改进液体晃动等效球摆模型的运动描述,说明书4/8页9CN116424575A9实现明确表征液体推进剂相对于1n号储箱的整体性刚体运动与非线性晃动;在此基础上,建立带大型柔性附件充液航天器大范围运动动力学模型;对航天器姿态动力学模型线性化,得到表观非耦合的姿态动力学模型;基于所述姿态动力学模型设计充液柔性航天器输出反馈姿态控制律,主动抑制帆板振动和液体晃动给航天器姿态运动带来的振荡扰动,实现带大型柔性附件充液航天器在轨大范围姿态平稳机动。
00462、本发明公开的一种含非线性晃动及大柔性附件航天器姿态复合控制方法,在基于所述姿态动力学模型设计充液柔性航天器输出反馈姿态控制律过程中,根据Lyaponuv稳定性定理,设计满足Lyaponuv函数的时间导数具有全局半负定性时的帆板振动动力学估计器、液体晃动动力学估计器和控制力矩,并根据所述帆板振动动力学估计器、液体晃动动力学估计器和控制力矩设计的充液柔性航天器输出反馈姿态控制律,进一步保证航天器姿态运动以及帆板振动渐近稳定,大幅削弱残余振动。
00472、本发明公开的一种含非线性晃动及大柔性附件航天器姿态复合控制方法,基于主振动模态设计相应的ZVD成型器脉冲序列,将ZVD成型器脉冲序列依次与目标姿态四元数进行卷积运算,得到整型后的欧拉四元数输入指令,所述欧拉四元数输入指令结合充液柔性航天器输出反馈姿态控制律,得到充液柔性航天器输入成型输出反馈复合姿态控制器。
通过所述输入成型输出反馈复合姿态控制器解决控制结构耦合问题,有效地抑制帆板振动并大幅削弱残余振动。
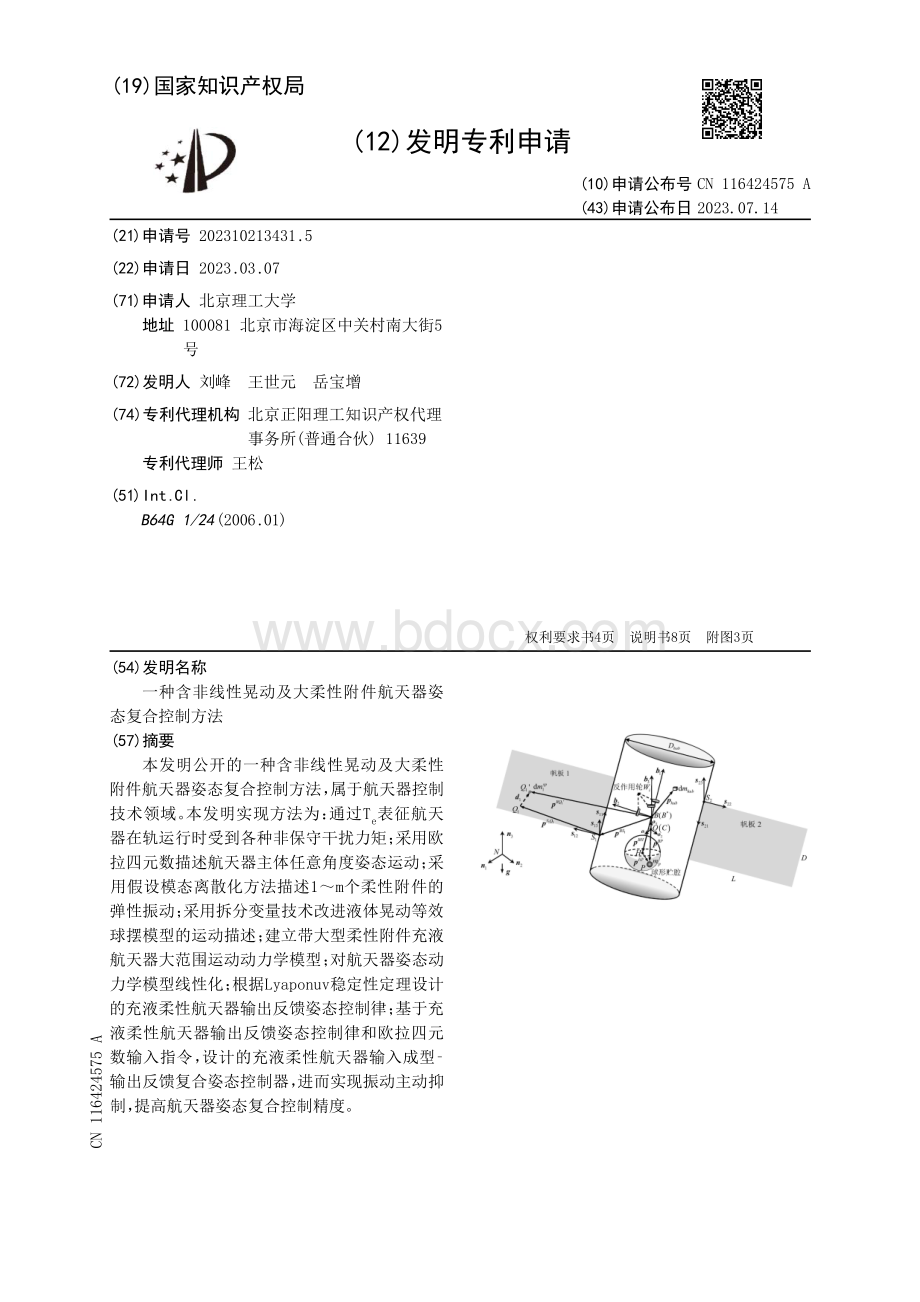
附图说明0048图1是本发明含非线性晃动及大柔性附件航天器姿态复合控制器依托的充液柔性航天器示意图;0049图2是本发明含非线性晃动及大柔性附件航天器姿态复合控制器流程图;0050图3是本发明得到的输入成型输出反馈复合控制器(子图3c)与传统比例微分(PD)控制器(子图3a)、输出反馈控制器(子图3b)作用下航天器姿态角速度时程响应的对比结果;0051图4是本发明得到的输入成型输出反馈复合控制器和输出反馈控制器作用下帆板振动变形时程响应的对比结果。
具体实施方式0052下面结合附图和实施例对本发明含非线性晃动及大柔性附件航天器姿态复合控制器做详细说明。
0053实施例10054本实施例中针对带单个部分充液球形储箱及对称安装的两块柔性太阳能帆板的航天器(图1是其物理模型示意图),设计相应的输入成型输出反馈复合姿态控制器。
0055如图2所示,本实施例公开的一种含非线性晃动及大柔性附件航天器姿态复合控制方法,具体实现步骤为:
0056步骤1、应用混合坐标意义下的拉格朗日方程建立带单个部分充液球形储箱及对称安装的两块柔性太阳能帆板的航天器姿态动力学模型。
此建模过程中采用欧拉四元数描述航天器主体任意角度姿态运动;假设两块对称太阳能帆板的振动变形为反对称形式,采说明书5/8页10CN116424575A10用假设模态离散化方法描述柔性太阳能帆板的弹性振动;采用拆分变量技术改进液体晃动等效球摆模型的运动描述,使其能明确描述液体推进剂相对于球形储箱的整体性刚体运动与非线性晃动(包括有限幅横向晃动和旋转晃动)。
步骤1按如下分步骤实施:
0057分步骤1.1、定义航天器系统各部分的运动,包括航天器主刚体平台相对于航天器质心轨道参考系(忽略航天器轨道运动时,判定轨道参考系是一个惯性参考系)的转动角速度、姿态控制三轴反作用轮相对于轨道参考系的转动角速度、柔性附件上任一质量微元相对于轨道参考系的位置和速度、液体晃动等效球摆模型集中质量相对于轨道参考系的位置和速度。
0058分步骤1.2、推导航天器系统的总动能和总势能。
0059分步骤1.3、航天器系统运动的拉格朗日函数为系统总动能与系统势能之差,将其分别代入到描述航天器系统各部分运动的拉格朗日方程中,进而可推导带单个部分充液球形储箱及对称安装的两块柔性太阳能帆板的航天器姿态动力学模型,其具体表达式如下:
00600061式中:
Imb代表航天器主体(包括航天器主刚体、两块太阳帆板和等效球摆等三部分)关于航天器本体系的转动惯量矩阵;是航天器角速度矢量在航天器本体系下表示的坐标矩阵,是的时间导数;P是第1块太阳帆板振动与航天器姿态运动之间的耦合系数矩阵;q是第1块太阳帆板振动的前3阶振动模态坐标组成的广义坐标矩阵;Q是球摆运动与航天器姿态运动之间的耦合系数矩阵;是由描述等效球摆模型相对于储箱的运动的欧拉角组成的广义坐标矩阵;Iw是三轴反作用轮关于航天器本体系的转动惯量矩阵;是三轴反作用轮相对角速度矢量在本体系下表示的坐标矩阵;表示的反对称对偶矩阵;Tg是航天器受到的重力梯度力矩;Msp是一块太阳帆板振动的模态质量矩阵;Ksp是一块太阳帆板振动的模态刚度矩阵;Mp是球摆运动的广义质量矩阵;Cp是球摆运动的等效阻尼系数矩阵;Kp是等效球摆运动的广义刚度矩阵;是球摆模型等效液体刚体运动的刚体坐标;Tw是姿态控制三轴反作用轮输出的控制反力矩在航天器本体系下表示的坐标矩阵。
0062步骤2、应用Lyaponuv稳定性理论设计实施例中航天器的输出反馈姿态控制律。
步骤2按如下分步骤实施:
0063分步骤2.1、针对步骤1中建立的全耦合形式的充液柔性航天器姿态动力学模型(式1);然后,可以假设柔性帆板振动和液体晃动都是小幅运动,忽略二阶以上(含二阶)小量对该航天器姿态动力学模型进行直接线性化,并采用如下变量代换:
00640065可得到便于后续设计输出反馈姿态控制律的表观非耦合形式的姿态动力学模型:
说明书6/8页11CN116424575A1100660067分步骤2.2、考虑到实际航天器通常为欠观测系统,本发明对与帆板振动和液体晃动相关的状态变量进行状态估计,如下引入误差变量:
00680069分步骤2.3、选取如下该充液柔性航天器系统状态空间内Lyaponuv函数:
00700071式中:
B1和B3是待定的对称正定矩阵;B2和B4是待定的对称半正定矩阵。
0072并根据Lyaponuv稳定性定理,设计满足Lyaponuv函数的时间导数具有全局半负定性时的帆板振动动力学估计器、液体晃动动力学估计器和控制力矩,此即为步骤2中设计的充液柔性航天器输出反馈姿态控制律,具体表达式如下:
00730074式中:
En是n阶单位矩阵;0mn是mn维零矩阵;kp和kd是控制增益系数;F1和F2的具体表达式为0075说明书7/8页12CN116424575A1200760077从式(6)可以看到,第一个分式是对帆板振动的动力学估计;而第二个分式是对液体晃动的动力学估计;第三个分式则是姿态控制反作用轮输出的控制反力矩,它是以航天器姿态及角速度传感器测得的输出信号作为反馈信息而计算得到的,因此,称这类控制器为输出反馈姿态控制器。
0078步骤3、考虑帆板的前两阶振动模态,设计如下ZVD脉冲序列:
00790080将其与目标姿态四元数进行卷积运算,得到整型后的欧拉四元数输入指令。
0081步骤4、结合步骤3中设计的充液柔性航天器输出反馈姿态控制律(式6)和步骤4中得到的欧拉四元数输入指令,即得到本发明所要设计的充液柔性航天器输入成型输出反馈复合姿态控制器。
0082根据所建立的带单个部分充液球形储箱及对称安装的两块柔性太阳能帆板的航天器姿态动力学模型(式1),编制相应的MATLAB仿真计算程序,对实施例中航天器进行三轴稳定姿态机动仿真算例,得到实施例中航天器分别在传统比例微分(PD)控制器、输出反馈控制器以及本发明设计的输入成型输出反馈复合控制器作用下的动力学响应结果。
0083图3给出了传统比例微分(PD)控制器(子图3a)、输出反馈控制器(子图3b)、本发明得到的输入成型输出反馈复合控制器(子图3c)三种姿态控制律作用下航天器姿态角速度时程响应的对比结果,可以看到传统比例微分(PD)控制器作用下航天器滚转角速度出现了非常明显的局部振荡(子图3a),这是由液体晃动和帆板振动对航天器姿态运动造成的动力学耦合影响;子图3b和子图3c显示输出反馈控制器和本发明得到的输入成型输出反馈复合控制器都能很好地抑制帆板振动和液体晃动给航天器姿态运动带来的振荡扰动。
图4是输出反馈控制器和本发明得到的输入成型输出反馈复合控制器作用下帆板振动变形时程响应的对比结果,可以看到输出反馈控制器会激发帆板产生明显的振动响应而引发突出的控制结构耦合问题,但是,本发明得到的输入成型输出反馈复合控制器能有效地抑制帆板振动并大幅削弱残余振动,很好地解决


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 一种 非线性 晃动 柔性 附件 航天器 姿态 复合 控制 方法
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 江南大学现代远程教育 考试大作业1.docx
江南大学现代远程教育 考试大作业1.docx
-
江南大学《信息安全概论》大作业答案.docx
-
江南大学现代远程教育考试大作业.docx
-
江南大学现代远程教育2020年上半年课程考试大作业.docx
-
2020年江南大学信息安全概论大作业答案.docx
-
江南大学现代远程教育2020年上半年课程考试大作业..docx
-
江南大学现代远程教育 考试大作业.docx
-
兽医师执业活动年度报告登记表.docx
 美术开学第一课-二年级.pptx
美术开学第一课-二年级.pptx
-
中小学教师中高级职称答辩备考试题及答案.docx
-
安卓课程设计-手机通讯录系统.doc
-
名师选拔笔试试题.docx
-
2021年全国普通高等学校运动训练、民族传统体育专业单独统.docx
-
成人失禁相关性皮炎护理实践专家共识解读.pptx
-
人音版音乐六年级下册全册表格式教学设计.docx
-
教师职称学科带头人笔试面试参考题.docx
-
骨干教师选拔笔试试题初稿.docx
-
行政法学判断题.docx
-
动物诊疗机构年度报告登记表.docx
-
好学生好学法读后感.docx
-
房屋买卖合同(详细范本).docx
-
高中寒假开学第一课.pptx
-
XX工程项目管理规划大纲.docx
-
纳税基础与实务(说课课件).pptx
-
美术素描课程标准.docx
-
最新部编人教版小学五年级下册语文全册备课教案设计及板书反思.docx
-
植物组织培养教学设计.docx
-
老年科健康教育.docx
-
紧盯“双碳”目标走好绿色低碳“赶考路”PPT课件.pptx
-
肿瘤的绿色治疗.ppt
-
摄影摄像课程标准.docx
-
植物组织培养教案.docx
-
二年级公共安全教育教案福建教育出版社.docx
-
二年级数学学情分析.docx
-
劳动合同仲裁案例范本.docx
-
发文3G视频监控前端设备技术规范书.docx
-
法学研究范式初探上.docx
-
方便面项目可行性研究报告.docx
-
房产测量练习题带答案.docx
-
房地产实习报告模板大全.docx
-
房屋工程施工重点难点分析与处理措施.docx
-
放射科诊断报告书写规范审核制度及流程.docx
-
林业个人事迹材料.docx
-
风机基础检验批 验评记录.docx
-
柳桉木项目可行性研究报告.docx
-
福建省福州市中考英语试题精校word版含答案.docx
-
两位数竖式加减法练习题 88.docx
-
飞机出事怎么办11个不可不知的自救求生方法.docx
-
分离塔项目可行性研究报告.docx
-
令人垂涎的川菜三十六种赏析.docx
-
六年级美术上册教学设计.docx
