 一需求清单.docx
一需求清单.docx
- 文档编号:30717963
- 上传时间:2023-08-19
- 格式:DOCX
- 页数:173
- 大小:45.82KB
一需求清单.docx
《一需求清单.docx》由会员分享,可在线阅读,更多相关《一需求清单.docx(173页珍藏版)》请在冰豆网上搜索。
一需求清单
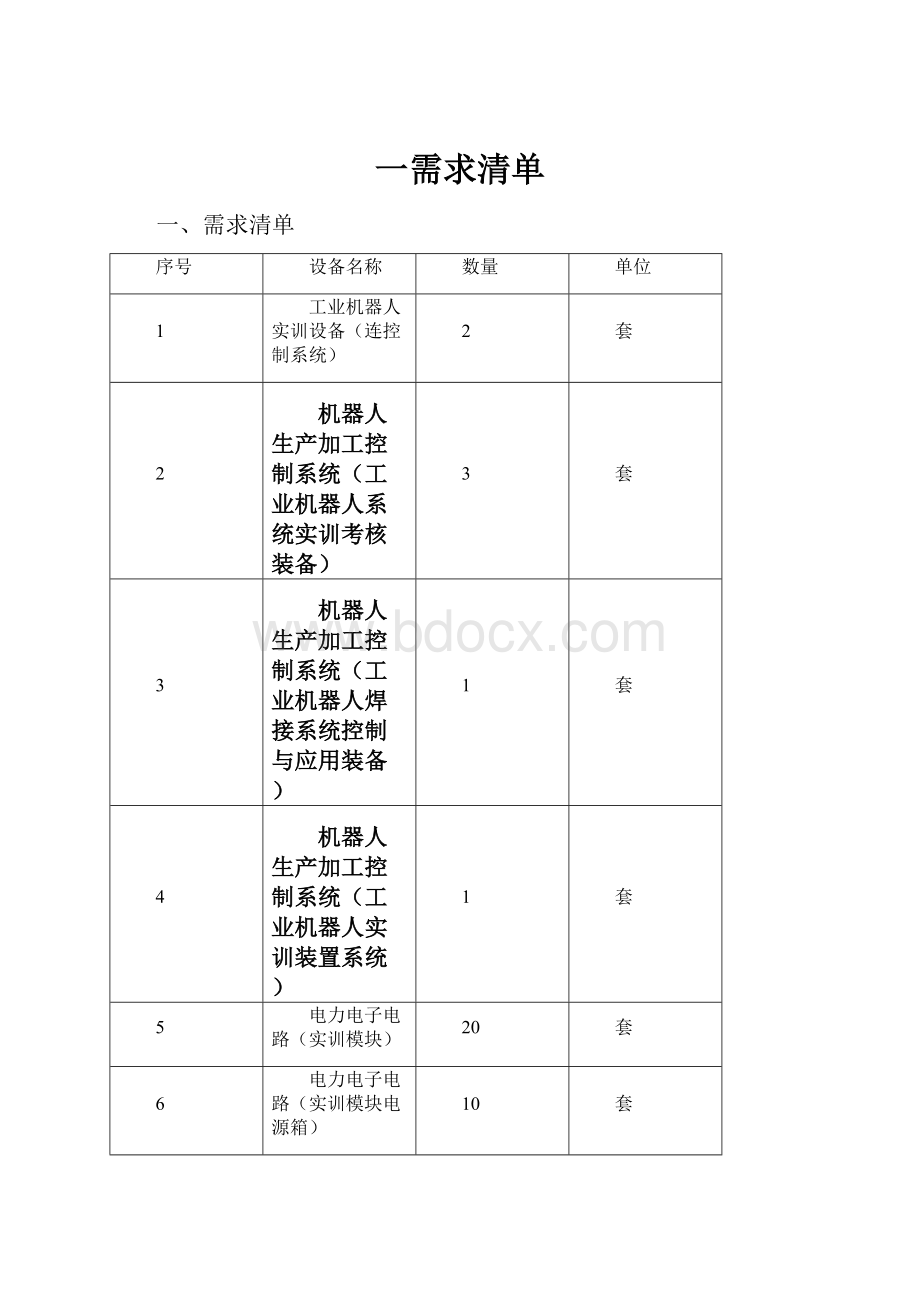
一、需求清单
序号
设备名称
数量
单位
1
工业机器人实训设备(连控制系统)
2
套
2
机器人生产加工控制系统(工业机器人系统实训考核装备)
3
套
3
机器人生产加工控制系统(工业机器人焊接系统控制与应用装备)
1
套
4
机器人生产加工控制系统(工业机器人实训装置系统)
1
套
5
电力电子电路(实训模块)
20
套
6
电力电子电路(实训模块电源箱)
10
套
7
机床控制维修模块(C6140型普通车床智能化实训考核模块)
10
套
8
机床控制维修模块(X62W型铣床电路智能化实训考核模块)
8
套
9
机床控制维修模块(Z3050型摇臂钻床电路智能化实训考核模块)
8
套
10
机床控制维修模块(M7130型平面磨床电路智能化实训考核模块)
10
套
11
蛇形机器人示教系统
8
套
12
六足机器人示教系统
8
套
13
简易机械手示教系统
8
套
14
机器人智能控制套件
10
套
15
PLC、触摸屏控制套件
10
套
16
控制系统
6
套
17
特种作业控制设备
1
项
18
实训室设计装饰
1
项
二、参数要求
序号
名称
技术要求
1
工业机器人实训设备(连控制系统)
1、本装置由实训台和工业机器人组成,是学校原有实训室装置的扩容与补充,为确保教学体系的统一性及实训考核的规范性需要,投标人所提供的工业机器人应充分考虑与原有设备性能及实训内容的兼容性,并在投标文件中注明本装置中使用的工业机器人品牌、型号、详细技术参数。
2、实训装置外形尺寸约1200*1800mm,工作电源:
AC380V±10%,50Hz。
3、实训平台采用工业型材搭建,底部安装调节脚,实训装置安装有工业机器人本体(带工装,可抓取物料),控制系统、电源控制箱、进料装置、储料装置、物料工件、安全防护网等。
4、六轴机器人技术要求
额定负载(KG)
6
结构形式
串联
轴数
6
工作半径(mm)
901
重复精度(mm)
<±0.05
最大工作范围(第一轴)
±170°
第二轴
+45°/-190°
第三轴
+155°/-120°
第四轴
±185°
第五轴
±120°
第六轴
±350°
安装方式
地面/天花板
控制系统
与本体匹配
位置反馈
旋变编码器
防护等级
IP54
5、配套控制系统技术要求
1)处理器类型:
相当于或优于i3-6100处理器(3.7GHz、3MB高速缓存);带多向风扇的计算系统技术;2)主板:
相当于或优于英特尔H110芯片组,LED侦错告警,主板电源双防雷及高级防静电;3)内存类型:
4GB(1*4GBDDR42133);
4)硬盘:
不小于500GSATA,最高支持4TB6.0Gb/秒,SMARTIV硬盘故障前自检;5)显卡:
HD530高清集成显卡,带VGA+DVI输出,支持投影机显示器双屏教学;6)声卡:
RealtekALC221Audio(所有端口立体声),内置扬声器;7)机箱类型:
立式机箱,不小于21L,免工具开启维护,内置音箱;8)外置I/O端口:
8个外置USB端口;至少4个USB3.0端口;1个RS-232串行端口,带电源状态指示灯;9)扩展插槽:
1个PCI,2个PCIExpressx1,1个PCIExpressx16;
10)网络接口:
集成千兆网卡;11)电源:
110V/220V/300W或以上,节能设计,要求与主机同一品牌,以电源标识为准;12)键盘/鼠标:
标准PS2中文键盘和抗菌鼠标,提供检测报告;13)光驱:
无;14)显示器:
19.5寸宽屏低蓝光液晶显示器,一级能效,rohs认证,具备显示器寿命优化技术,提供技术说明文件;15)可靠性:
平均无故障运行时间不低于50万小时,提供国家电子计算机质量监督检验中心出具的证书;16)安全性:
标配可信平台模块(TPM),机箱锁槽;17)应用:
主板集成软件方式实现网络同传和硬盘保护功能,支持保护卡对硬盘的多重启动分区,支持网络同传及自动更改系统参数功能,保护卡须支持对32位及64位WINDOWS7、Windows10及Server2008R2、Sever2012R2操作系统的快速还原,支持对LINUX操作系统的保护。
支持常用的操作系统(DOS,Windows系列立即还原,Linux备份还原);18)噪音值认证:
整机噪音值不高于20分贝,提供国家级证明文件;19)操作系统:
无;20)保修:
3年原厂免费上门服务(含显示器、鼠标、键盘等,原厂7*24小时免费800/400技术电话支持。
6、技术资料及培训服务;提供机器人系统操作技术资料,如技术文本、控制软件(如有)、设备操作实训指导书、不少于2天的专业技术培训服务。
2
工业机器人系统实训考核装备
一、设备整体要求:
该装备围绕工业机器人工业应用情景和教学技能核心技能点,覆盖了基础训练应用实训、搬运应用实训、焊接应用实训、机床上下料应用实训、码垛应用实训、模拟涂胶实训、装配实训、变位机应用实训、自动生产线应用实训、等多功能一体化实训装备,每种实训功能相对独立,包含多种工业机器人典型应用方式,是一个综合性的机器人教学的典型装备。
二、技术参数要求
1.交流电源:
三相AC380V±10%50Hz;
2.温度:
-10~50℃;环境湿度:
≤90%无水珠凝结;
3.整机功耗:
≤10.0kVA
4.安全保护措施:
具有接地保护、漏电保护、断电保护功能,安全性符合相关的国家标准。
三、功能描述
1、设备安全防护系统
该装备采用落地式的安装形式,保证设备的稳定可靠,同时采用多道防护装置包含了有机玻璃防护墙、安全门(安全锁)系统、安全光幕等硬性保护。
且处于不同位置铺有不同颜色的绝缘地毯,共分为绿色安全位置,黄色机器人操作位置,红色危险区域三种。
同时设备有机玻璃防护墙上还装有语音报警器,可根据PLC程序对操作者处于设备不同的区域位置进行语音提示。
2、工业机器人安装台及操作对象工作台
工业机器人安装台与操作对象工作台采用优质钢板连接,表面喷漆工业黄。
机器人安装台采用圆形钢管焊接大小落地式结构,可保证机器人的快速、稳定运行。
操作对象承载平台底座采用铸铁。
工作台台面采用不锈钢面板,厚度22mm,表面镀鉻处理,网格间距30mm,M6螺纹安装孔。
可快速牢靠安装多种工作对象。
便于对机器人的工装夹具、操作对象等结构学习、拆装练习。
同时操作对象承载台侧面装有集成信号端子盒、六组电磁阀、气源装置等。
通过该端子对机器人夹具信号、各种模块信号进行集成转接至电气控制柜内便于电路集成控制。
便于模块间的更换练习。
3、系统控制柜
系统控制柜内配有市场主流PLC、继电器、漏开等元件。
面板分为演示及实训。
可通过控制柜面板上的模式选择开关进行切换。
演示模式:
通过PLC配合组态人机界面对工业机器人、设备安全系统、实训模块电气控制等进行集成控制。
可练习工业机器人、PLC、组态、电气控制、变频调速、伺服控制等进行系统集成。
实训模式:
切换至实训模式时机器人的I/O信号、操作对象承载台信号切换至控制柜面板上对应的安全插座上。
且各类信号下方配有多个按钮及指示灯可通过安全连线直接对各个信号进行连接,可学习机器人的I/O点配置进行机器人的电气、气路实训。
四、设备特点
(1)该装备采用落地式的安装形式,保证设备的稳定可靠,同时采用多道防护装置包含了有机玻璃防护网、安全门(安全锁)系统、安全光幕等硬性保护。
(2)具有良好的柔性和多样化的工作方式,通过不同的搭配应用,实现多种使用环境,满足职业院校实训教学和开展技能竞赛的要求。
五、实训项目要求:
(1)工业机器人的基本认识工作任务。
(2)工业机器人示教器运动操作工作任务。
(3)工业机器人的点位示教工作任务。
(4)工业机器人基本参数设置工作任务。
(5)工业机器人基本运动指示工作任务。
(6)工业机器人基于示教器的程序编辑工作任务。
(7)工业机器人IO控制应用工作任务。
(8)工业机器人基本接线方法工作任务。
(9)PLC和工业机器人的配合使用。
(10)触摸屏和工业机器人的配合使用。
(11)变频器和工业机器人的配合使用。
(12)伺服和工业机器人的配合使用。
(13)简单轨迹运行工作任务。
(14)平面圆形描图工作任务。
(15)平面矩形描图工作任务。
(16)曲面圆形描图工作任务。
(17)曲面矩形描图工作任务。
(18)固定位置搬运工作任务。
(19)平面矩阵码垛工作任务。
(20)斜面位置搬运装配工作任务。
(21)平面矩阵立体码垛工作任务。
(22)涂胶编工作任务。
(23)模拟焊接工作任务。
(24)工件装配工作任务。
(25)机床上下料工作任务
六、设备配置
模块名称
序号
名称
规格、技术参数
数量
一、工业机器人
1
6关节工业机器人
1、规格:
工作范围:
580mm;有效荷重:
3kg。
2、特性:
手腕设10路集成信号,4路空气(5bar),重复定位精度为0.01mm,机器人可安装在任意角度,防护等级为IP30,控制器选用IRC5紧凑型/IRC5单柜或面板嵌入式。
3、各轴运动范围及最大运行深度:
轴1旋转范围:
+165°~-165°,最大运行速度250°/s。
轴2手臂旋转范围:
+110°~-110°,最大运行速度250°/s。
轴3手臂旋转范围:
+70°~-90°,最大运行速度250°/s。
轴4手腕旋转范围:
+160°~-160°,最大运行速度320°/s。
轴5弯曲旋转范围:
+120°~-120°,最大运行速度320°/s。
轴6翻转旋转范围:
+400°~-400°,最大运行速度420°/s。
4、1kg拾料节拍:
25×300×25mm0.58s,TCP最大速度:
6.2m/s,TCP最大加速度:
28m/s2,加速时间:
0-1m/s0.07s。
5、电气连接:
电源电压:
200-600V,50/60HZ,变压器额定功率:
3.0KVA,功耗0.25KW。
6、物理特性:
机器人底座尺寸:
180×180mm,机器人高度:
700mm,重量:
25kg。
7、工作环境:
运行中:
+5℃(41℉)至+45℃(122℉);运输与储存时:
-25℃(-13℉)至+55℃(131℉);短期:
最高+70℃(158℉);相对湿度:
最高95%;噪音水平最高70dB(A);
安全性:
安全停止,紧急急停,2通道安全回路监测,3位启动装置。
辐射:
EMC/EMI屏蔽。
和机器人厂家具有相关战略证明
8、控制器单相220V50-60Hz电源,额定功率3KVA;采用多处理器系统,PCI总线,奔腾CPU,大容量闪存(256M),20sUPS备份电源;带DC24V16in/16outIO卡;机器人基本控制软件,ROBOTWARE5.0版本;带二次开发选项,提供基于VB和C#的二次开发功能;在机器人使用寿命内,使用机器人离线软件进行实时程序、IO、机器人3D动态动作监控;远程机器人系统备份与恢复功能;具有自动工具重量与载荷检测设定功能;具有机器人全寿命保养自动维护检测系统功能;具有机器人运动轨迹实时微调功能;自带自定义可编程IO;具有3D实时舒适摇杆手动操作系统;具有电池电量环保节省功能;支持RAPID编程语言规范,并直接解释执行;机器人控制系统软件基于WINCE平台,以便基于机器人的二次开发;机器人控制系统原配固态存储器容量1G,并支持USB扩展为副存储器;具有紧急停止,自动模式停止,测试模式停止等安全保护措施;控制器带视频接口。
9、机器人控制柜带8输入8输出开关量接口。
10、示教器:
便携式示教盒,具备操纵杆和键盘;彩色触摸式显示,具中/英文菜单选项,示教器电缆10m。
11、机器人软件:
BaseWare机器人操作系统;强大的RAPID编程语言;PC-DOS文本格式;软件出厂预装,并存于光碟。
12、设备随机配置要求:
说明书1本;维护手册1本
优先考虑ABB.发那科等
★终身机器人系统功能升级。
★提供机器人制造商授权书。
1台
二、实训工位
功能说明:
实训工位设备框架采用铝合金+有机玻璃+安全门(锁)+安全光幕的结构组成,同时配有语音报警提示功能,充分保证学习和使用过程的安全。
1
防护罩
整体外形参考尺寸:
1800*1800*2000;
由23块有机玻璃和铝合金骨架组成。
设备安装场地建议尺寸:
4米*3米。
1套
2
安全光幕
尺寸:
1350*1395mm
1只
4
信号扬声器
12-36V支持TF卡外置MicroUSB接口
1只
3
门禁开关
双控
1只
4
KOB电磁锁
吸力280公斤
1只
三、操作对象承载台
1
操作对象承载台
参考外形尺寸:
500mm*400mm*500mm;
操作对象承载平台底座采用铸铁。
工作台面采用不锈钢面板,厚度22mm,表面镀鉻处理,网格间距30mm,M6螺纹安装孔。
可快速牢靠安装多种工作对象。
1套
四、工业机器人安装台
1
工业机器人安装台
参考外形尺寸:
700mm*1660mm*517mm;
地面安装底板尺寸:
700mm*1660mm*15mm;
底板尺寸:
700mm*1660mm*15mm;
机器人安装底座由钢管:
外径184mm,厚度8mm,长度250mm。
焊接而成。
底座整体尺寸:
600mm*600mm*274mm;
机器人安装面尺寸:
520mm*520mm**12mm;
1套
五、控制系统
1
可编程控制器
采用三菱西门子等PLC,
1只
2
人机界面
触摸屏。
7寸,串口,USB口,以太网口,人机界面产品的设计符合工业环境。
1只
3
气动系统
空气压缩机电源220V、额定功率560W、排气量58L/min、排气压力0.8MPa、储气罐容量23L、重量23KG,气源处理件,气动控制系统电磁阀组,气动附件等组成。
1套
4
电控箱
电控箱参考尺寸:
900mm*530mm*980mm;
带四个自锁脚轮,面板包括机器人输入、输出信号检测口,夹具信号输入输出检测口,模式选择按钮,触摸屏安装孔,急停、启动、复位、暂停按钮、运行指示、停止指示,实训指示灯红绿各四只,实训急停开关一只、点动和自锁按钮各三只。
漏电开关一只,空气开关三只,开关电源两只,中间继电器(AHN223224DC24VAHNA21T5A)16只,中继转换板一套,接线端子一套。
线槽一套,线槽通过接头360度无缝对接,同时可安装伺服驱动器、变频器、PLC等。
1套
六、基础学习和实训套件(投标时提供实物照片)
1
轨迹示教模块
采用不锈钢加工制造,在平面、曲面上蚀刻不同图形规则的图案。
可训练对机器人基本的点示教,直线、曲线运动足迹的掌握;学习点的定位及机器人运动路线选择优化
1套
2
描图夹具
描图夹具采用焊接工装套件中的焊枪夹具,以焊丝为基准来进行,描图编程任务。
1套
七、搬运工作站(投标时提供实物照片)
1
搬运工作站
工作站由两块地板座分别有四组不同形状和编号的工件组成,有圆形、正方形、六边形等。
底板外形尺寸560×400×8mm
1套
2
吸盘夹具
夹具采用吸盘式夹具,包含真空吸盘、吸盘夹具、机器人法兰盘连接件等组成
1套
八、机床上下料工装套件(投标时提供实物照片)
1
机床上下料工作站站
采用铝合金及铝型材构建,由落料机构、检料平台、立体库、模拟机床气动卡盘等组成。
整体外形尺寸:
560×400×500mm
1套
2
推料气缸
1只
3
顶料气缸
1只
4
磁性开关
2只
5
物料不足检测传感器
1只
6
检料平台传感器
1只
7
气动卡盘
2只
九、焊接工装套件(投标时提供实物照片)
1
焊接工工作站
焊接工作站由四条30×30×270mm、八条30×30×200mm的铁制管,以及若干组合夹具组成整体尺寸为:
560×400×230mm的方形焊接模型。
模拟多道焊缝的焊接。
1套
2
焊枪夹具
采用焊枪,机器人法兰连接件等组成。
1套
十、码垛工装套件(投标时提供实物照片)
1
码垛工作站
码垛工作站整体采用铝材加工,表面阳极氧化处理。
由物料摆放底板、码垛底板、长方形/正方形两种物料块组成。
操作者可根据需要选择摆放;可根据需要自由组合码垛出多种形状;练习对机器人码垛、阵列的理解并快速编程示教的应用技能。
1套
2
夹具
码垛夹具采用吸盘式夹具,包含SMCZPT25BS-A6真空吸盘、吸盘夹具、机器人法兰盘连接件等组成,
夹具本体及法兰盘连接件,采用铝制且表面进行阳极氧化处理。
1套
十一、模拟涂胶工装套件(投标时提供实物照片)
1
涂胶工作站
涂胶工作站整体外形尺寸:
560×400×80mm,由尺寸为130×100×80mm的被涂胶对象,280×200×8m模型支撑板等组成。
可用模拟被涂胶对象的多道轨迹涂胶。
1套
2
涂胶夹具
涂胶夹具由:
1只涂胶枪(型号:
SDA25×104-7kgf/cmØ31×196mm),夹具本体及法兰盘连接件组成,
1套
十二、装配工装套件(投标时提供实物照片)
1
装配工作站
装配工作站包含,两套供料机构、料台检测等。
一个装配台(尺寸135×120×140mm),一个三层三列的立体库组成。
1套
2
气动夹具
夹具采用HFZ20平行手抓气缸,铝制手指等组成。
和吸盘组成一体夹具
1套
3
推料气缸
2只
4
顶料气缸
2只
5
磁性开关
4只
6
物料不足检测传感器
2只
7
检料平台传感器
2只
十三、伺服电机变位机(投标时提供实物照片)
1
模拟变位机工作站
机械部分采用铝材构建,变位机底板尺寸:
560×400×10mm。
变位机支架高250mm、翻转机构尺寸300×200mm。
1套
2
伺服电机
1只
3
精密行星减速机
1只
4
伺服驱动器
1只
5
伺服编码器线、伺服主电路线
1只
十四、自动生产线工作站(投标时提供实物照片)
1
自动生产工作站
包含供料单元、平皮带、轴承、主动轴、从动轴、码垛工作台等组成
1套
2
变频器
1只
3
旋转编码器
1只
4
减速电机80YS
1只
十五、书写工作站(投标时提供实物照片)
1
书写工作站
包含书写平台,采用A4纸、书写笔、书写笔夹具等组成
1套
十六、装配台
1
装配钳工台
尺寸:
900mm*500mm*1300mm;
共分为两层,下层采用角铁焊接而成台采用20mm的实木台面。
上层有工具固定存放区域,不同的工具存放在其固有位置,并配有台虎钳。
1个
十七、工装套件存放柜
1
工装套件存放柜
钣金柜,上下节,共分四层,可按规定存放8套相关实训套件。
1个
十八、软件仿真教学视频
1
软件仿真教学视频
视频具有以下功能机器人标准IO板的设定,机器人系统输入输出与IO信号的关联,机器人程序数据,机器人IO通讯的介绍,机器人系统的备份与恢复,机器人设定机器人系统的日期与时间等。
★配备ABB机器人教学仿真软件和工作站仿真软件以及学习视频资料)
1套
十九、电脑桌
1
电脑桌
铝木结构,含4个万向带刹车轮,580*400*780mm
1张
二十、配套工具
1
配套工具
人机界面通信电缆、可编程控制器通信电缆、小一字螺丝刀、小十字螺丝刀、长柄一字螺丝刀、长柄十字螺丝刀,剪刀、剥线钳、电工钳、尖嘴钳、斜口钳、、活动扳手、万用表等。
1套
二十一
1
电脑
I5-6400/H110/4GDDR4/1T/1G显卡/DVD/DOS/19.5"WLCD投标时提供该系统软件著作证书、原厂正版授权及相关信息安全认证等证明资料
1套
二十二
1
教材
教材具有实操与应用技巧、应用案例精析、虚拟仿真、现场编程、工作站系统集成、工业机器人技术应用等相关内容并现场提供教材或教材样稿;
1本
3
工业机器人焊接系统控制与应用装备
1、设备整体要求:
工业机器人焊接系统控制与应用装备主要由机器人、机器人控制器、焊机、送丝装置、焊枪、烟雾过滤器、气瓶(100%工业液体二氧化碳)、焊接工作台,控制柜、电脑工作台等组成。
的整体采用的是大型钢板落地式结构,这样能很好的保证工业机器人在该平台上可以达到100%的速度,体现出机器人的稳、准、快。
2、技术参数要求:
1.交流电源:
三相AC380V±10%50Hz;
2.温度:
-10~50℃;环境湿度:
≤90%无水珠凝结;
3.外形参考尺寸(含防护栏):
长×宽×高=(5000×3000×2000)mm
4.整机功耗:
≤6kW
安全保护措施:
具有接地保护、漏电保护、断电保护功能,安全性符合相关的国家标准。
3、功能特点
随着现代制造业和服务业的转型升级,工业机器人在装配、码垛、包装、金属切割、焊接、喷涂、和涂装等领域得到了越来越多的应用。
在不同领域的应用会对机器人的安装、编程、调试人员提出了不同的要求,选择一种能满足各种领域技术要求又能方便与学习的装备显的十分重要。
机器人非常广泛的应用在实际工业领域的装配、包装、焊接等任务,同时提供了多种环境学习系统。
主要工作任务是根据实际需要完成相应的焊接任务(如对焊、脚焊),提高工作效率,让学生掌握基本的焊接技巧与方法。
其次又可以完成装配、包装等工作,一机多用,节约了学校的设备投资。
(1)机器人单元的基本功能
机器人单元在高质高效的焊接生产中发挥了极其重要的作用,对于焊接夹具不同的工作面,机器人都能通过程序判断出相应的焊接指令,同时如果工艺有所更改,只要修改焊接程序就能满足相应的变化。
焊接电压、电流、焊接速度及焊接干伸长对焊接的结果起决定性作用,使用机器人可以保证每条焊缝的焊接参数是恒定的,这样焊接质量受人为因素小,降低了对工人操作技术的要求,提高了焊接质量。
(2)烟尘净化单元的基本功能
设备配有烟雾净化器,吸管安装在工作区域内,能够直接吸走烟尘和飞溅,吸力强,节约资源。
有效的减少对环境的烟尘排放,能有效防止焊接废气对人体的伤害。
(3)焊接单元的基本功能
焊接单元主要有焊机、送丝机、送丝盘、焊枪、100%工业液体二氧化碳等组成,焊接单元主要任务是提供高质量的焊接,焊接单元可以实现以下功能:
①具有过流、过压、欠压、热保护、堵丝、开机保护功能,保障焊机的可靠性及操作者的安全
②系统内置焊接专家数据库,自动智能化参数组合
③优异的焊接性能,实现多种材料高品质焊接
④数字化控制,控制波形精细,实现一脉一滴过渡
⑤标配数字、模拟专机接口,选配机器人接口,容易实现焊接自动化
⑥全数字送丝控制系统,焊丝送丝平稳
⑦解决了焊铝起弧难熔合,收弧易形成弧坑的难题
(4)控制柜单元的基本功能
控制柜单元主要有PLC、触摸屏、开关电源、等组成,主要功能是控制1355A设备的启动、停止、监控,对报警信息的及时响应,是1355A设备的控制中心。
4、设备实训项目
(1)硬件的安装与调试
a.工业机器人底座的安装与调试技术
b.工业机器人安装与调试技术
c.工业机器人夹具安装与调试技术
e.工业机器人焊接系统的安装与调试技术
f.工业机器人焊接系统送丝机的安装与调试
(2)电气安装与调试
a.工业机器人本体与控制器之间


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 需求 清单
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 #2机组现场施工用电布置措施.docx
#2机组现场施工用电布置措施.docx
-
《个人贵金属质押借款合同》兴业银行.docx
-
《科学发展观和小康社会的经济建设》复习导学案.docx
-
《我和祖父的园子》第一课时教案两篇word.docx
-
《质量》教学案例与设计.docx
-
2惠农小册子.docx
-
7A版个人与团队模拟考试题及答案.docx
-
10篇新部编四年级下册语文课内外阅读理解专项练习题及答案.docx
-
16初四物理热和能知识点总结精讲.docx
-
20XX社会语言经典语录流行风暴.docx
-
48篇教学案例分析报告题.docx
-
《电子工厂安全管理制度汇总》.docx
-
《机械制造课程设计》指导.docx
-
《钱学森》教案第二课时.docx
-
《边城》读后感5篇.docx
-
《固定式压力容器安全技术监察规程》.docx
-
《论雷峰塔的倒掉》.docx
-
《手术台就是阵地》教学设计三年级语文下册.docx
-
《夏洛的网》课外阅读教学设计.docx
-
《自己的花是让别人看的》教案.docx
-
3C检查表090429.docx
-
7客运专线CRTSⅡ型板式无砟轨道施工工法.docx
-
《笔算除法》课时教案设计.docx
-
11#楼高大模板支撑体系专项方案.docx
-
17科学分析经济形势.docx
-
《电流和电路》易错题精讲综合检测题与答案.docx
-
《会计信息系统》习题含答案.docx
-
《汽车电器设备与维修》发电机分教考分离试题及标准答案.docx
-
《四川省排污许可证管理暂行办法》.docx
-
《新编实用英语》教案第一册Unit.docx
-
0母版锅炉值班员计算题WORD版.docx
-
3年级下册英语单词记忆人教版.docx
-
冰雪答题4 6年纪必会题和提高题库.docx
-
South Park612.docx
-
部编版人教版九年级上册历史复习提纲知识点doc.docx
-
八年级生物下册期末必考题及答案.docx
-
05仿真题答1经营分析与信息技术.docx
-
新概念二第62讲学生版.docx
-
窗口服务演讲稿范文.docx
-
部编人教版八年级上册词语解释全册内容10页.docx
-
部编语文79年级完整版必背内容.docx
-
创新创业课程心得体会精选.docx
-
新湖南师范大学学生管理系统综合素质测评指南.docx
-
13年第四季度全国兽药监督抽检辖区计划不合格产品汇总表.docx
-
财管第18章短期预算.docx
-
财务管理第一轮复习A含答案第三章筹资管理.docx
-
新农村建设现状问题对策1.docx
-
春季仁爱英语八年级下册 Unit 8 topic 1 重点知识点总结及练习.docx
-
0456体育公共关系复习思考题.docx
-
财务经理竞聘演讲稿大全.docx
-
《信息技术与信息安全》最新标准答案.docx
