 打印虎教程.docx
打印虎教程.docx
- 文档编号:30694560
- 上传时间:2023-08-19
- 格式:DOCX
- 页数:46
- 大小:2.11MB
打印虎教程.docx
《打印虎教程.docx》由会员分享,可在线阅读,更多相关《打印虎教程.docx(46页珍藏版)》请在冰豆网上搜索。
打印虎教程
第一步,我们先搭建3D打印机的亚克力框架部分。
这一步的搭建过程中,我们需要的材料包括:
部件
数量
备注
亚克力激光切割部件
9
厚度6mm,使用13块中的9块。
Y轴步进电机支架、热床支架以及两块Z轴顶板后面再使用
M3*16螺丝、垫片、螺母
16
这一步中对所使用部件最关键的质量要求,是亚克力板一定要切割整齐,不能有1毫米的误差。
一旦出现误差,后面的安装很难继续,即使勉强安装上,3D打印机也会因为内部受力变形,引发各种问题。
工具方面,这一步很简单,只需要合适的十字螺丝刀一把就可以了。
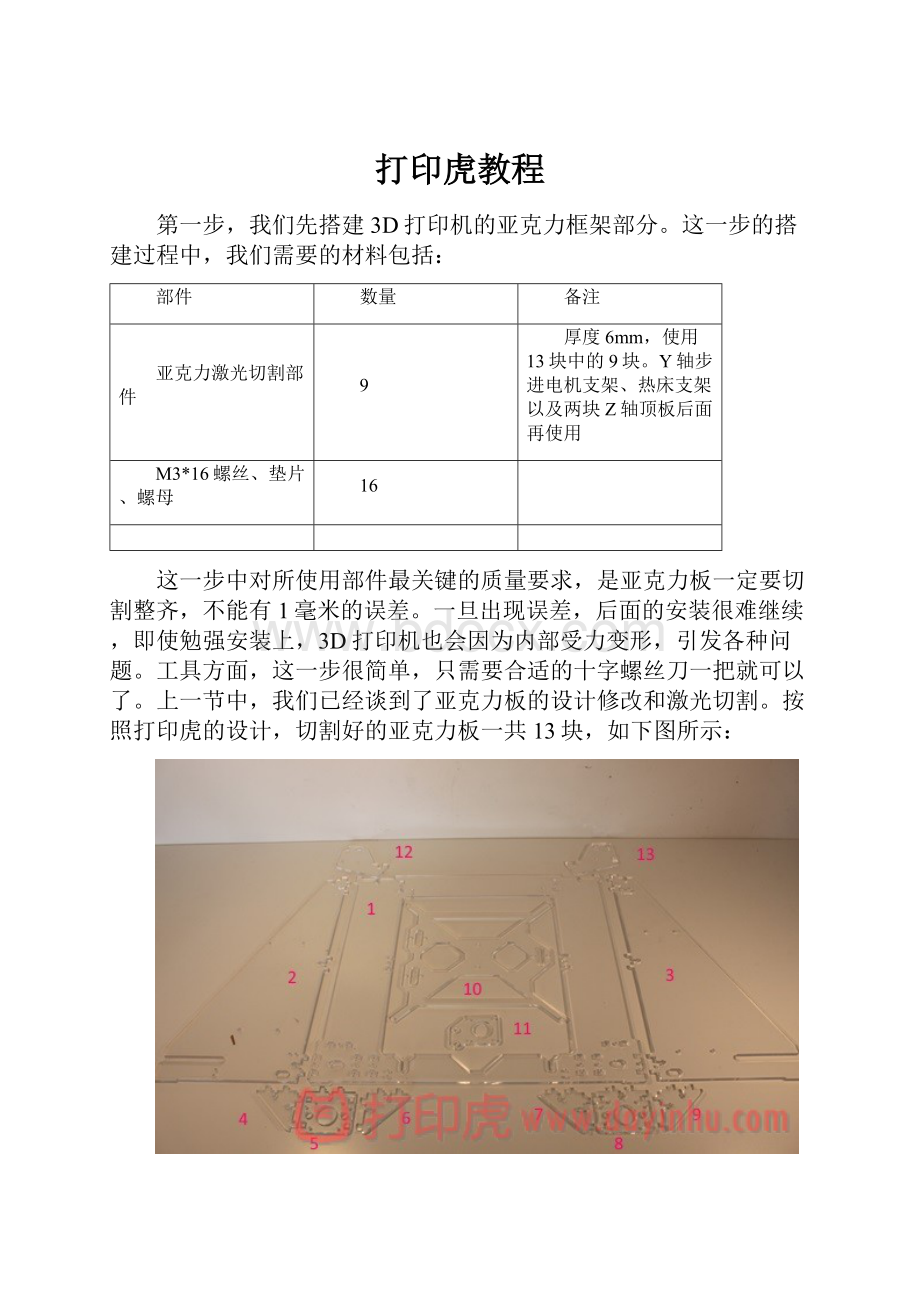
上一节中,我们已经谈到了亚克力板的设计修改和激光切割。
按照打印虎的设计,切割好的亚克力板一共13块,如下图所示:
在这一步中,我们会使用这13块亚克力部件中的9块。
剩下4块在后面的步骤中再安装。
使用螺丝刀以及M3*16螺丝、垫片和螺母,组装起这9块亚克力板,如下图所示:
这时,9块亚克力板组成的框架,已经可以站起来了。
由于我们使用的亚克力板是透明的,所以图中部件的前后顺序可能会看不太清楚。
以图中的红色箭头所指为Y轴正方向,大三角支撑板位于Y轴负方向一侧,而用于固定Z轴步进电机的小支撑板,位于Y轴的正方向一侧。
注意不要把它们安装到同一侧。
另外,要特别注意的是左上角红色圆圈处的线缆穿孔。
这个孔一定要在图示的位置,如果安装反了,最好立刻纠正,否则越拖到后面越麻烦。
其他零件都是对称的,没有方向的问题。
第二步,搭建框架Y轴部分。
这一步的搭建过程中,我们需要的材料包括:
部件
数量
备注
3D打印件
5
这一步使用Y轴四角、Y轴惰轮端以及Y轴同步带固定件共5件
亚克力板激光切割件
2
这一步使用Y轴步进电机支架和热床支架
光杆
2
465mm*2
丝杆
6
495mm*2,275mm*1,210mm*3
LM8UU直线轴承
3
MF105ZZ轴承
2
M8螺母、垫片
38
M5*20螺丝、螺母
1
M3*16螺丝、垫片、锁紧螺母
2
小扎带
7
这一步对零件的质量要求,是光杆、丝杆一定要足够直。
特别是光杆,由于直线轴承在光杆上运行,如果光杆不够直,必然会造成直线轴承运动阻力过大,失灵的情况。
同时,轴承也不能是劣质产品,需要有良好的润滑和一定的耐久度。
工具方面,除了需要螺丝刀之外,这一步还需要两把用于M8螺母的扳手(通常是14号)。
Prusai33D打印机的Y轴部分,是由光杆、丝杆以及四角的打印件组成的。
为了保证3D打印范围的Y轴尺寸足够大,我们在这里采用了465mm的直线光轴和495mm的丝杆。
这一步中,我们在丝杆上准备好M8螺丝和垫片(共8对),在光杆上准备好LM8UU直线轴承。
如下图所示:
从上面的图片中,可能看的不是很清晰,丝杆上螺母和垫圈的排列顺序,从左到右是
(1)垫片
(2)螺母(3)螺母(4)垫片(5)垫片(6)螺母(7)螺母(8)垫片。
两根丝杆是同样的。
这样准备好丝杆和光杆之后,把这两对金属杆,安装到四角打印件支撑上,打印件外侧再加上M8螺丝和垫片(共4对),用扳手把两端固定用的螺母拧紧,并用小扎带固定好:
准备Y轴的惰轮,需要Y轴惰轮端打印件,以及一对M5*20螺丝、螺母,再加两只MF105ZZ轴承。
MF105ZZ是带法兰边的轴承,要把带边的两端向外侧,不带边的两端向内侧安装,形成一个限制同步带运动的沟槽:
接下来,找到剩下的4根丝杆,长度分别是1根275mm和3根210mm,加上用于安装Y轴步进马达的亚克力板,以及用于安装Y轴同步带轴承的打印件:
可以看到,较长的275mm丝杆,以及亚克力板,都位于3D打印机的Y轴负方向一侧。
而用于安装Y轴同步带轴承的打印件,位于3D打印机的Y轴正方向一侧。
这时,我们就可以用M8螺母和垫片将它们固定起来:
这次的螺母,先不要用扳手拧紧,用手拧上就可以了。
等一下和亚克力板框架安装到一起,调整好之后,再拧紧。
在Y轴后侧比较长的那根丝杆上再加4对M8螺丝、螺母之后,亚克力板框架和Y轴框架就能够安装到一起了:
先把亚克力板和Y轴框架摆成图中的状态。
这时要注意图中四个红圈内的亚克力板与Y轴框架结合部的状态。
如果没有问题,就把Y轴框架沿箭头所指的方向推入。
调整各个部位的螺丝状态之后,就可以使用扳手拧紧了。
拧紧螺母之后的3D打印机框架如图所示:
接下来,我们就可以安装热床支撑了。
这一步非常简单,首先使用M3*16螺丝、垫片以及锁紧螺母(带尼龙防滑圈的螺母),将Y轴同步带固定装置打印件固定在热床支撑亚克力板上。
注意这里要使用锁紧螺母,以防在热床运动中螺丝逐渐松脱。
下图是Y轴热床支架翻过来的样子:
之后,只要用三根小扎带把亚克力板热床支架固定住就可以了:
这时,Y轴热床支架应该已经可以在Y轴上自由滑动了。
如果上图看不清楚小扎带是如何绑的,可以看这张高清大图:
第三步,搭建框架X轴部分。
这一步的搭建过程中,我们需要的材料包括:
部件
数量
备注
3D打印件
3
这一步使用X轴步进电机端、X轴惰轮端以及X轴移动平台三个3D打印件
光杆
2
385mm
全铝挤出头的铝制框架
1
全铝挤出头的一部分
梯形丝杆配套螺母
2
梯形丝杆步进电机的一部分
LM8UU直线轴承
3
MF105ZZ轴承
2
M5*20螺丝、螺母
1
M3*10螺丝、四方螺母
4
M3*16螺丝、螺母
8
小扎带
6
这部分对零部件的要求,同样是光杆要直。
这里的光杆,直接影响到未来3D打印机X轴的运转是否顺畅。
工具方面,这一步只需要螺丝刀就可以了。
在Prusai33D打印机的设计中,X轴连接着挤出头,并在Z轴的支撑下移动,因此是一个比较复杂的部分。
我们先把X轴与挤出头的连接部安装起来。
首先,我们使用6条小扎带将3个LM8UU直线轴承固定在X轴与挤出头连接用的3D打印件上。
如果先进行后面的步骤,再返回头做这步,有可能会遇到麻烦:
这里要注意一点,使用6条小扎带安装3个直线轴承的时候,一定要完全按照打印件预设的穿孔走线,否则会给后期的安装带来困难。
这步之后,我们使用4个M3*10螺丝以及对应的四方螺母,连接这个部件与全铝挤出头的铝制框架:
这个部件完成之后,我们就可以组装整个X轴了。
类似Y轴的做法,我们先准备好X轴的惰轮。
这里需要X轴惰轮端打印件,以及一对M5*20螺丝、螺母,再加两只MF105ZZ轴承:
因为我们希望使用梯形丝杆作为Z轴,X轴的步进电机端以及惰轮端两个打印件,都需要先安装好与梯形丝杆配套的螺母。
这里我们需要M3*16螺丝、螺母8对。
工作在Z轴的四个LM8UU直线轴承,也在这时候塞入X轴步进电机端以及惰轮端两个打印件中:
这一步中需要注意的是,梯形丝杆配套的铜质螺母是与梯形丝杆配套的零件,通常发货时会套在梯形丝杆上,而不是和其他螺丝螺母放在一起。
安装这个铜质螺母时,因为是和打印件固定在一起,通常要多费些力气,但一定要注意安装到位。
一旦没有安装到位,X轴和Z轴连接部很可能会不够垂直,导致X轴整体无法顺利升降。
然后,使用两根385mm直线光轴,连接X轴步进电机端打印件、X轴惰轮端打印件以及X轴与挤出头连接用打印件。
如图:
因为缺少Z轴步进电机的支撑,X轴暂时还不能与主框架对接在一起。
到此为止,3D打印机的框架部分已经完成。
检查一下目前还剩下的元件。
亚克力板方面,应该还剩下两块Z轴的顶板。
所有的打印件,除了用于限位开关的3个小卡子之外,应该都已经被使用了。
同时,除了两根Z轴光杆之外,所有光杆、丝杆以及轴承,应该已经都被安装在正确的位置上,手边不应该有空闲的轴承了。
如果你不幸发现跟我的情况不一样,应该停下来检查一遍,及早解决问题。
如果经过检查,确定到目前为止一切正常,下面我们开始步进电机以及电子系统的安装。
第三节,步进电机和电子系统
完成了框架和机械部件的搭建之后,我们得到了两个大的模块。
一块是3D打印机的主体结构,另一块是3D打印机的X轴。
下面,我们开始安装步进电机和电子系统。
第一步,Z轴步进电机的安装。
这一步的搭建过程中,我们需要的材料包括:
部件
数量
备注
光杆
2
320mm
Z轴梯形丝杆步进电机
2
梯形丝杆长度300mm
亚克力板激光切割件
2
两块Z轴顶板
M3*16螺丝、垫片、螺母
4
M3*10螺丝、垫片
8
从这一节开始我们要使用步进电机。
步进电机是整个3D打印机的动力来源,因此步进电机的质量,对于3D打印机的工作状态是很关键的。
根据打印虎的测试表明,不同厂商的步进电机,质量差异很大,而且与售价关系不大。
有些步进电机卖的不便宜,但质量却也很难让人满意。
好的步进电机,工作噪音小,发热量小,运行平滑稳定,扭矩也足够大。
对于梯形丝杆步进电机来说,梯形丝杆还要足够直。
满足以上全部这些要求,才能算是好的步进电机。
这么好的步进电机哪里去找?
自然是到打印虎的网上商店啦,哈哈哈哈。
工具方面,仍然非常简单,一把螺丝刀应该就够用了。
另外,整个第三节中,有多个地方需要处理导线,而处理导线几乎一定要用剥线钳,关于剥线钳后面就不再重复了。
我们先把两只步进电机安装在Z轴底部的步进电机安装架上。
这一步需要8个M3*10螺丝、垫片。
安装步进电机的时候,要注意把步进电机引线从亚克力板预留的孔中穿过。
如图:
然后,将上一节已经制作好的X轴框架通过两个梯形丝杆螺母与梯形丝杆步进电机连接上。
很明显,这里要先把X轴两个梯形螺母间距调整好,然后搭在Z轴梯形丝杆顶部,用双手同步轻轻旋转步进电机的梯形丝杆,将X轴与Z轴连接好。
这一步的最后,我们把Z轴光杆穿入,并把Z轴的顶部亚克力板安装上。
这里需要4组M3*16的螺丝、垫片和螺母。
安装的时候,要注意顺序,先插入光杆,再安装Z轴顶部的亚克力板。
安装亚克力板,会帮我们最终固定两个Z轴步进电机的距离,使它们的梯形丝杆保持垂直状态。
完成Z轴的安装之后,可以再次尝试用双手同步旋转Z轴,使X轴框架沿Z轴方向上下移动,检查双手所需用力是否均匀,X轴框架移动是否平稳。
第二步,安装Y轴步进电机。
这一步的搭建过程中,我们需要的材料包括:
部件
数量
备注
42步进电机
1
5mm轴,出轴长度22mm
同步轮
1
自带无头紧固螺丝
同步带
1
同步带锁紧弹簧
1
M3*10螺丝、垫片
4
使用内六角头螺丝便于安装
小扎带
2
这一步的主要工具是内六角扳手、螺丝刀和尖嘴钳。
内六角扳手用于安装同步轮。
而没有尖嘴钳的帮助,同步带锁紧弹簧还是很难安装上的。
驱动Y轴的步进电机在安装之前,需要先套上同步轮,并用同步轮自带的黑色无头紧固螺丝固定。
如图:
然后,使用4个M3*10内六角螺丝、垫片固定。
因为这里的操作空间比较小,我们特别使用了内六角螺丝,这种螺丝可以用小扳手拧紧。
这里要特别注意Y轴步进电机的安装方向。
如果看起来和我的照片不同,那么很可能是安装反了。
虽然反向安装也可以通过固件设置的方法使其正常工作,但那毕竟是给自己找麻烦了,不如这里就把问题解决。
最后,用同步带连接步进电机、惰轮以及热床。
同步带的接头,应该位于热床下面。
如果有必要,还应该加上同步带锁紧弹簧。
在锁紧之前,要注意Y轴同步带的三个支撑点,包括同步轮、惰轮以及热床支撑,需要在同一条直线上。
两个方向的同步带之间不要直接摩擦。
调整好之后,把两端的M8螺母拧紧,最终完成Y轴的传动部分。
第三步,安装X轴步进电机。
这一步的搭建过程中,我们需要的材料包括:
部件
数量
备注
42步进电机
1
5mm轴,出轴长度22mm
同步轮
1
自带无头紧固螺丝
同步带
1
同步带锁紧弹簧
1
M3*20螺丝
4
小扎带
2
X轴与Y轴非常相似。
首先也是把步进电机套上同步轮,并且固定好。
这与刚刚做的Y轴动作完全一样,就不给图片了。
下一步是把带同步轮的X轴步进电机安装到X轴上。
这步需要用M3*20螺丝4个,安装好之后如图:
这里需要注意的是,未来同步带将在打印件中运行。
这样就要求同步轮上的齿,要和打印件的槽口大体对应上。
如果偏差太多,运行起来就会引起不必要的摩擦。
与Y轴类似,用同步带连接步进电机、惰轮以及X轴与挤出头的连接部。
同步带的接头,应该位于X轴与挤出头的连接部后面。
如果有必要,也应该加上同步带锁紧弹簧。
第四步,安装三轴限位开关。
这一步的搭建过程中,我们需要的材料包括:
部件
数量
备注
3D打印件
3
三轴限位开关卡子
限位开关
3
型号为SS-5GL
M2*20螺丝、垫片、螺母
6
细红黑导线
若干
热缩管
若干
在这一步中,限位开关是否灵敏,关系到3D打印机的定位准确性。
三个轴中,最关键的是Z轴的定位。
Z轴是否能够准确定位,与最终打印质量的关系很大。
建议使用欧姆龙的限位开关,别用杂牌子的。
安装这些限位开关,主要需要使用螺丝刀。
当然,在安装之前,可能需要用电子焊接设备(电烙铁、焊锡、助焊剂)连接上红黑细导线。
三个轴的限位开关安装并不复杂。
如果你是从零开始的散件安装,需要在安装之前先给限位开关焊接上足够长的导线。
导线有多种不同的接法,我建议接COM和NC两端,这样开关未触发时,是连通状态。
三个轴的安装方法都是类似的,各需要限位开关打印件1个、限位开关1个、M2*20螺丝、垫片和螺母2组。
安装完成之后,可以看到如下图所示的状态:
第五步,安装热床。
这一步的搭建过程中,我们需要的材料包括:
部件
数量
备注
热床
1
建议使用3mm铝基板热床
热敏电阻
1
热床支撑弹簧
4
M3*20螺丝、垫片、锁紧螺母
4
粗红黑导线
若干
建议使用1.5平方毫米线材
Kapton胶带
若干
常见的热床,分铝基板和PCB基板两种。
铝基板更平整,导热更快更均匀,因此我们建议大家使用铝基板热床。
如果用不够平整的PCB基板热床,一张附加的高硼硅玻璃几乎就是必须的了,而这样的话整体造价可能就更贵了,而且玻璃还比较易碎,使用维护都比较麻烦。
因此还是铝基板热床更优一些。
这步的安装,仍然需要焊接设备,以及螺丝刀。
热床在安装之前,需要先经过处理。
处理包括了焊接电线、在上面粘贴kapton胶带,以及在反面粘贴热敏电阻。
如果是常用的12V电源,要把红色线焊接到1号焊点,黑色导线同时焊接到2号和3号焊点。
如果想做的更完美,还可以焊接上电阻和发光二极管。
这样,热床通电的时候发光二极管会亮,对用户来说是一个提示。
完成这些处理后的热床,如下图所示,引出四根线:
安装并不复杂。
只要在热床支架上,利用四组穿过弹簧的M3*20螺丝、垫片、锁紧螺母,将热床固定在热床支架上即可。
方向要稍微注意一下,把引出的导线,指向Y轴的负方向就可以了。
这里利用了弹簧,使热床既能稳定地支撑在热床支架上,有能有一定的向下压缩的空间。
这样,即使挤出头校准不够好,也不会和热床硬碰硬,造成挤出头或热床的严重损坏。
安装好热床的Prusai3如图:
第六步,安装挤出头。
这一步的搭建过程中,我们需要的材料包括:
部件
数量
备注
全铝挤出头套件
1
挤出头是3D打印机的一个关键部件。
这部分是否能够可靠运转,直接决定了3D打印机能否正常使用。
当然,这部分也可以使用3D打印件完成,这可以方便我们对其做随时的设计修改。
但一旦设计定型,我们还是希望使用更可靠的铝合金部件。
因此,我在这里使用了一套全铝挤出头套件。
这里主要还是用螺丝刀,以及几种不同型号的内六角扳手,没有复杂的工具要求。
在安装之前,我们要把挤出头套件拆开为几个部分,以便接下来的安装。
这几个部分分别是挤出机部分、挤出头部分、一个M4螺丝、加热头和热敏电阻、挤出头风扇(需要M3*20螺丝两只)。
如下图所示。
首先,我们把挤出机部分安装好。
在已经安装在X轴上的U型铝架的上下两侧,分别是挤出机和挤出头。
把它们安装到一起。
然后,再用M4螺丝固定。
这里的每一个螺丝,都必须拧紧。
因为一旦开始加热,原本很小的缝隙将变大,一来部件之间可能会变得很容易活动,二来如果内部有塑料流动的部件,还很可能会溢出液体的塑料。
如下图,注意加热铝块的方向。
如果方向错误,下面的加热头和热敏电阻会很难安装。
接下来,安装加热头和热敏电阻。
这两个部件,都是插在加热铝块中,使用其中的无头紧固螺丝固定。
下图是安装好之后的样子:
最后,把侧面的风扇固定好。
注意风扇出风口和挤出头喷嘴之间的相对位置。
这个风扇是专门给挤出头喷嘴处降温的。
所有这些部件安装好之后,用小扎带把这一组线扎起来。
第七步,安装电源,并把所有的电子部件连接到Melzi电路板。
这一步的搭建过程中,我们需要的材料包括:
部件
数量
备注
12V350W电源
1
带三芯电源线
Melzi电路板
1
带USB线
M4*12螺丝、垫片
4
粗红黑导线
若干
建议使用1.5平方毫米线材
各种颜色细导线
若干
电源和主板的重要性,我在这里就不用多讲了。
Melzi是整个3D打印机的大脑。
因此,这两个部件,也需要讲求质量,千万不要图便宜,用劣质产品。
在连接之前,需要先检查一下各个部件的引线长度是否足够。
如果不够,这时需要用焊接的方式延长引线。
不能确定的时候,可以先连到Melzi电路板,之后在整理电线的一步中,再根据情况适当增减。
首先,我们给电源连上线。
把+12V红线连到+V,直流地线连到-V。
220V交流电源线,把外皮剥开之后,棕色火线连接L,蓝色零线连接N,黄绿色地线连接地。
如下图所示。
你的开关电源的接线排列和我的不一定完全相同,要注意正确接线。
由于热床、加热挤出头电流较大,3D打印机的整体电流可能达到20A甚至30A,这里一定要使用比较粗的线。
我使用了1.5平方毫米的线材。
连好线之后,就可以把电源模块安装到3D打印机框架上了。
使用4个M4*12螺丝、垫片,如图所示安装好。
现在,所有的部件都准备好了,就差核心的主板了。
把所有部件都按照顺序连接到主板上,整个工作就完成了。
在打印虎搭建的Prusai3中,我们选择了更为紧凑、专用的Melzi作为主板。
在开始连线之前,我们有一项尽量要提前完成的操作,就是调整Melzi主板上的步进电机电流。
虽然通常卖家在卖给我们Melzi主板的时候,已经把这个地方调整好了,但我们自己最好确认一下,免得安装好了之后发现问题再调,就麻烦的多了。
具体的步进电机电流调整方法,可以参考【打印虎】RepRap3D打印机步进电机电流调整图解,我们这里就不再重复了。
下面,我们拿着已经调整好步进电机电流的Melzi电路板,按照Melzi电路板从左至右的顺序连接每一条线。
最左边是X,Y,Z,E四个步进电机接口X-MOTOR,Y-MOTOR,Z-MOTOR,E-MOTOR。
所有的步进电机,要按照A+A-B+B-的顺序接线。
如下图所示,可以看出,对于我的步进电机来说,是黄、蓝、绿、红的线序。
这里需要特殊说明的,是Z轴步进电机。
由于Z轴有两个步进电机,我们需要把它们串联起来使用。
从Melzi主板出发,接线的顺序是:
第一个接线柱接左侧步进电机A+,左侧步进电机A-接右侧步进电机A+,右侧步进电机A-接第二个接线柱;第三个接线柱接左侧步进电机B+,左侧步进电机B-接右侧步进电机B+,右侧步进电机B-接第四个接线柱。
通过这样的连接方式,可以实现左右两个Z轴步进电机完全同步工作。
需要说明的是,上面的左侧和右侧完全是为了描述方便,两个步进电机的连接是可交换的。
可以参考下面的逻辑图:
下面POWER连接电源。
从开关电源出来的粗线连接到这里。
同时,把挤出机散热风扇电源线连接到这里。
挤出机散热风扇不同于吹挤出头的风扇,是一个常开的风扇,不能通过程序调节,因此,就直接连接到12V电源上了。
再下面的三个端口HOTBED,HOTEND,FAN,分别连接热床加热、挤出头加热和挤出头风扇。
可以明显的看出,根据不同元件消耗功率的不同,采用了不同粗细的电线。
接着,标记了XSTOP,YSTOP,ZSTOP的三个位置,分别连接三个轴的限位开关。
可以看到,整个板子上所有红黑两线的接头,都是红线在左黑线在右。
虽然限位开关实际上正接反接都可以,但我们还是保持了这个习惯。
最后,只要把热床热敏电阻接入BTEMP,把挤出头热敏电阻接入ETEMP,就完成了。
全部完成之后,我的3D打印机全貌。
看起来连线是不是非常杂乱?
没关系,收拾一下就会变好。
不过,在收拾之前,也许你已经迫不及待尝试运行它了。
如果想开始试运行,可以跳过本节下面的部分,直接开始下一节。
如果你更有耐心,可以先跟我一起,把线整理好。
第八步,整理线缆,并最终把Melzi电路板安装到亚克力支架上。
这一步的搭建过程中,我们需要的材料包括:
部件
数量
备注
M3*8双通尼龙柱
4
M3*8+6尼龙螺柱
4
M3*10螺丝、垫片
4
小扎带
若干
粗细缠线管
若干
首先把Melzi电路板用两个尼龙柱、两个尼龙螺柱和两套M3*10螺丝垫片固定在外侧。
这不是Melzi电路板的最终位置,但在这个位置上操作空间比较大,比较适合我这样不太灵巧的人。
从下图可以看出,我在做的过程中把很多线都压在了电路板下面,这也不是最终的状态,下面我们要逐一理顺这些电线。
下面整理Y轴步进电机、Z轴远离Melzi电路板一边的步进电机以及电源的引线。
Y轴的步进电机4根引线,要从下图下面箭头指向处用小扎带绑住;Z轴远离Melzi电路板一遍的步进电机,有2根引线要连到步进电机,加上2根12V电源线,再加上汇集到一起的Y轴步进电机的4根引线,一共8根线,要从下图上面箭头指向处用小扎带绑住。
这里还可以用缠线管,把这些线绕起来,显得更加整齐。
当然,你应该已经发现,做这步之前,这8根线一定要从Melzi电路板上拆下,从我们设计的Prusai3门型框架的上方通过之后,再重新连接到Melzi电路板上。
搞定了远离Melzi电路板一侧的走线之后,下面我们处理挤出头。
类似地,挤出头上所有的线,也都要汇集到Melzi电路板,把这些线都用缠线管绕在一起。
这些线包括了挤出头步进电机4根线、加热头2根线、热敏电阻2根线、挤出头散热风扇2根线和喷嘴散热风扇2根线一共12根线。
把上面所有处理过的线汇集到一起之后,在红色箭头处用小扎带固定。
要注意,这时候最好把挤出头移动到最远端,保证留出了足够长的挤出头电缆。
在红色箭头指向的小扎带右边,有我们预留的导线通孔,把所有的线从这个孔导出。
很明显,所有的线都要从Melzi电路板上拆下,才能完成这一步。
除了上面两股电缆之外,还有热床相关的第三股电缆。
同样用绕线管把这些电缆缠绕起来,这里包括了2根加热电线以及2根热敏电阻线。
这股电缆就不需要任何固定了。
别忘了,两侧Z轴步进电机之间,还有两根连接线。
我们在下方框架,也预留了红色箭头指向处两个用于小扎带的孔,可以把这两根电线剪裁到合适的长度,并且用小扎带固定在框架上。
如下图所示。
上面我们把所有的导线,都从远离Melzi主板的一端开始整理,最后自然就是重新连接到Melzi主板了。
逐一把导线修剪成合适的长度,重新固定在Melzi的接口上。
最后,把Melzi从我们开始整理导线时临时固定在的靠外的两个螺丝孔位,移动到靠内的两个螺丝孔位。
再把剩下的X轴步进电机以及三轴限位开关套上绕线管,就全部完成了。
如下图所示。
图中可以看到,我故意把挤出头和热床都放在了远端。
这样,就可以确认即使他们运行到最远端的时候,也不会拉扯到


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 打印 教程
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 #2机组现场施工用电布置措施.docx
#2机组现场施工用电布置措施.docx
-
《个人贵金属质押借款合同》兴业银行.docx
-
《科学发展观和小康社会的经济建设》复习导学案.docx
-
《我和祖父的园子》第一课时教案两篇word.docx
-
《质量》教学案例与设计.docx
-
2惠农小册子.docx
-
7A版个人与团队模拟考试题及答案.docx
-
10篇新部编四年级下册语文课内外阅读理解专项练习题及答案.docx
-
16初四物理热和能知识点总结精讲.docx
-
20XX社会语言经典语录流行风暴.docx
-
48篇教学案例分析报告题.docx
-
《电子工厂安全管理制度汇总》.docx
-
《机械制造课程设计》指导.docx
-
《钱学森》教案第二课时.docx
-
《边城》读后感5篇.docx
-
《固定式压力容器安全技术监察规程》.docx
-
《论雷峰塔的倒掉》.docx
-
《手术台就是阵地》教学设计三年级语文下册.docx
-
《夏洛的网》课外阅读教学设计.docx
-
《自己的花是让别人看的》教案.docx
-
3C检查表090429.docx
-
7客运专线CRTSⅡ型板式无砟轨道施工工法.docx
-
《笔算除法》课时教案设计.docx
-
11#楼高大模板支撑体系专项方案.docx
-
17科学分析经济形势.docx
-
《电流和电路》易错题精讲综合检测题与答案.docx
-
《会计信息系统》习题含答案.docx
-
《汽车电器设备与维修》发电机分教考分离试题及标准答案.docx
-
《四川省排污许可证管理暂行办法》.docx
-
《新编实用英语》教案第一册Unit.docx
-
0母版锅炉值班员计算题WORD版.docx
-
3年级下册英语单词记忆人教版.docx
-
广东最重要的水源地文档格式.docx
-
管理学罗宾斯小测验答案Word格式.docx
-
国际海上拖航合同协议书范本模板Word格式文档下载.docx
-
国学常识200题Word格式.docx
-
汉字的传统笔画顺序Word文件下载.docx
-
河南城建学院马克思考试复习Word文件下载.docx
-
厚德载物销售期方案技术标Word格式.docx
-
湖北专版届高三英语总复习配套专题练习 阅读理解Word格式.docx
-
湖南长沙中考英语真题及答案Word文档下载推荐.docx
-
河南省洛阳市学年高二下学期期中考试语文试题 含答案 精品Word文档格式.docx
-
规范化学校标准要求Word文件下载.docx
-
贵州重点项目六枝特区优质肉猪产业建设项目可行性研究报告文档格式.docx
-
建立健全人民代表大会制度的意义Word格式文档下载.docx
-
国际金融学试题和答案免费1范文文档格式.docx
-
国家免检产品建议报告Word文件下载.docx
-
河北专版中考英语复习方案第二篇语法专题突破专题07动词及动词短语试题冀教版Word文档格式.docx
-
国有企业开展保持党员先进性教育实施意见Word格式文档下载.docx
-
工程质量控制程序及质量保证措施Word文件下载.docx
-
含有动物或颜色的英语趣味短语Word文档下载推荐.docx
