 雅马哈贴片机操作手册.docx
雅马哈贴片机操作手册.docx
- 文档编号:30258529
- 上传时间:2023-08-13
- 格式:DOCX
- 页数:27
- 大小:219.23KB
雅马哈贴片机操作手册.docx
《雅马哈贴片机操作手册.docx》由会员分享,可在线阅读,更多相关《雅马哈贴片机操作手册.docx(27页珍藏版)》请在冰豆网上搜索。
雅马哈贴片机操作手册
YAMAHA_Xg系列贴片机编程
一、基本概念
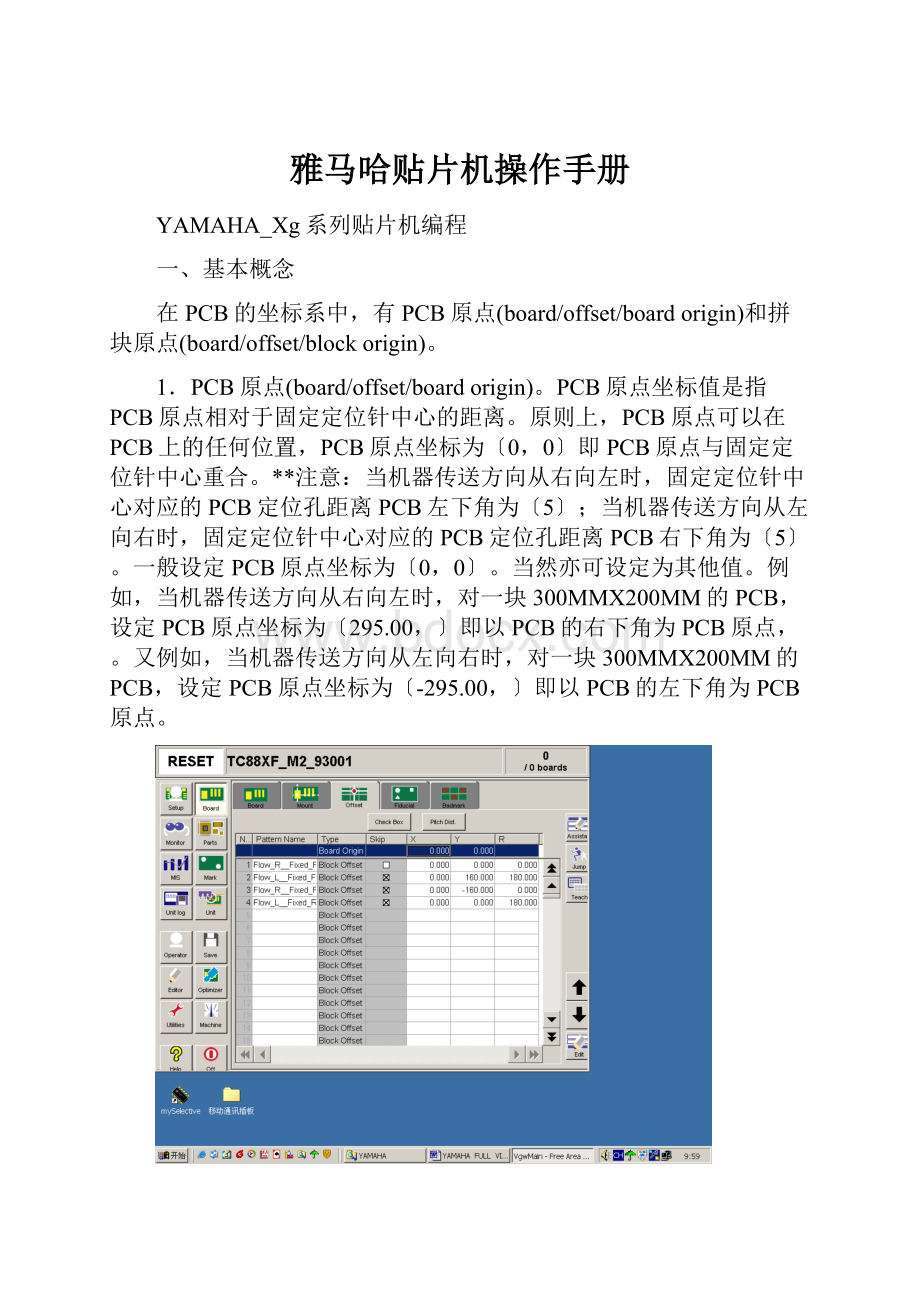
在PCB的坐标系中,有PCB原点(board/offset/boardorigin)和拼块原点(board/offset/blockorigin)。
1.PCB原点(board/offset/boardorigin)。
PCB原点坐标值是指PCB原点相对于固定定位针中心的距离。
原则上,PCB原点可以在PCB上的任何位置,PCB原点坐标为〔0,0〕即PCB原点与固定定位针中心重合。
**注意:
当机器传送方向从右向左时,固定定位针中心对应的PCB定位孔距离PCB左下角为〔5〕;当机器传送方向从左向右时,固定定位针中心对应的PCB定位孔距离PCB右下角为〔5〕。
一般设定PCB原点坐标为〔0,0〕。
当然亦可设定为其他值。
例如,当机器传送方向从右向左时,对一块300MMX200MM的PCB,设定PCB原点坐标为〔295.00,〕即以PCB的右下角为PCB原点,。
又例如,当机器传送方向从左向右时,对一块300MMX200MM的PCB,设定PCB原点坐标为〔-295.00,〕即以PCB的左下角为PCB原点。
2.拼块原点(board/offset/blockorigin)。
拼块原点是指每个拼块上所有的点的的坐标原点,原则上可以在拼块的任何位置,拼块原点坐标值是以PCB原点为坐标原点,拼块原点坐标为〔0,0〕即该拼块的原点与PCB原点重合。
拼块原点最好选取拼块中某个焊盘的中心或边角,不要选取丝印字符或孔中心。
3.PCB原点和拼块原点的关系。
首先,拼块原点坐标值是以PCB原点为坐标原点。
另外,PCB原点可以在PCB的任何地方,而拼块原点最好在小拼块中。
如果将PCB原点定在第一个拼块的原点位置,则PCB原点坐标值为该点到固定定位针中心的XY距离,第一拼块的拼块原点坐标为〔0,0〕。
*每个PCB板程序包括PCB信息子文件(board/board)、贴装信息子文件(board/mount)、原器件信息子文件(parts)、标记信息子文件(parts)、拼块原点信息子文件(board/offset)、局部标记信息子文件〔localfid.Markinf.〕和局部坏标记信息子文件〔localbadmarkinf.〕。
PCB程序
COMPONENTINFMARKINFPCBINFBLOCKREPEATINFLOCALFIDINFLOCALBADMARKINFMOUNTINF
*PCB信息子文件〔pcbinf.〕中,PCB标记点(pcbfid.)和坏板标记点(pcbbadmark)以PCB原点为坐标原点,拼块标记点(blockfid.)和坏块标记点(blockbadmark)以拼块原点为坐标原点。
贴装信息子文件〔mountinf.〕中贴装点的坐标有两种情况:
当不是拼板时以PCB原点为坐标原点;是拼板时以第一拼块的拼块原点为坐标原点。
*原器件信息子文件〔componentinf.〕和标记信息子文件〔markinf.〕是基本子文件,其他子文件要调用这两个子文件的内容,所以要先编制。
PCB信息子文件中,前三行为PCB原点、PCB尺寸和PCB标记点信息,是其他点的坐标基础,所以要先于其他点编制。
多拼板中拼块标记点(blockfid.)和坏块标记点(blockbadmark)以及贴装点坐标以拼块原点为坐标原点,所以拼块原点信息子文件要先于它们编制。
*程序编制完了后,要进行跟踪检查以确认贴装位置的准确性,再进行试贴以确认元件和贴装角度的准确,最后给出优化条件进行程序优化。
即以以下过程进行:
创建或修改PCB文件——编制PCB文件——跟踪检查贴装位置并修改——试贴元件并修改——设定条件进行优化
下面是几种单板和多拼板的几种PCB原点的不同设定的坐标情况。
5
5
说明:
心形中心为机器原点,十字星中心为固定定位针中心,五角星中心为PCB原点,三角形中心为拼块原点,实线圆为PCB标记,需线圆为拼块标记,方框中心表示贴装位置。
各末端箭头线表示箭头所处点的坐标是以该线的起点为坐标原点,例如贴装点坐标以拼块原点为坐标原点,而拼块原点以PCB原点为坐标原点。
上图表示PCB原点为〔〕,设定PCB原点与固定定位针中心不重合的多拼板的坐标系。
说明:
上图表示PCB原点设定到固定顶位针中心的多拼板的坐标系,PCB原点坐标为〔0,0〕。
说明:
上图表示将PCB原点设定到第一拼块原点的多拼板坐标系的情况。
实际上,两个原点为一个点,这种情况时,多拼板的编程过程将会简单。
请参看下面的编程流程介绍。
注意:
PCB原点坐标可能不为〔0,0〕,但第一拼块的原点坐标为〔0,0〕。
说明:
上图表示PCB原点与固定定位针不重合的单板的坐标系情况,次时,PCB原点坐标一定不为零。
说明:
上图表示PCB原点与固定定位针重合的单板的坐标系情况。
此时,PCB原点坐标一定为〔0,0〕,这是最简单的坐标系。
二、编程流程
YAMAHAVIOS软件〔机器中软件〕和YVOS〔离线软件〕支持拼板功能,即如果PCB本身为多拼板或生产时将多块PCB放在一个工装夹具组成多拼板,则编程时只需先编制拼块原点信息子文件〔blockrepeatinf.〕中的拼块原点信息再编制贴装信息子文件〔mountinf.〕中的第一拼块上各贴装点的贴装信息,然后优化时设定拼板转化条件即可,而不需要一一编制每个拼块的每个贴装点。
由于在编程过程中,多拼板要涉及到拼块概念和对应的拼块坐标系,所以将编程流程分为单板和多拼板两钟情况。
1.PCB板不是多拼板,而是一块单板。
创建并选择PCB文件
YVL88IIOperationManual
(Page4-5)
编辑原器件信息子文件〔componentinf.〕
(Page4-10)
编辑标记信息子文件〔markinf.〕
(Page4-83)
编辑PCB信息子文件〔pcbinf.〕
(Page4-100)
编辑局部标记信息子文件〔localfid.Markinf.〕
(Page5-28)
编辑局部坏标记信息子文件〔localbadmarkinf.〕
(Page5-41)
编辑贴装信息子文件〔mountinf.〕
(Page4-110)
检查、存盘、退出编辑优化条件设置,并进行优化
(Page4-116)
局部标记信息和局部坏标记信息根据实际情况决定是否需要编制,如果不需要则跳过相应的编程过程。
2.多拼板〔Multiblock〕。
分为两种情况:
一块大的PCB板是由多个相同的拼块连接而成的,来料为大板;多个小拼块放在一个工装夹具里进行贴装加工,来料为小拼块。
原则上,后一种情况时由于各拼板的相对位置是不定值,所以要保证贴装准确就必须使用块标记点(blockfid.)以确认该拼块的准确位置。
而前一种情况时依据PCB板情况和贴装精度要求来定是否使用块标记点。
一般来讲,PCB板越薄,尺寸越大,且由于拼块之间连接点少则PCB板就越容易变形,则仅依靠PCB标记识别很难全面校准整个PCB,此时使用块标记点比较好。
另外,贴装精度要求的高低也要考虑,精度要求高则最好使用块标记点。
对细间距元器件而言,采用局部标记点更好。
注意:
使用的标记点越多,识别标记点所用的时间也越多,每个识别点的识别过程至少要秒钟以上。
创建并选择PCB文件
YVL88IIOperationManual
(Page4-5)
编辑原器件信息子文件〔componentinf.〕
(Page4-10)
编辑标记信息子文件〔markinf.〕
(Page4-83)
编辑PCB信息子文件〔pcbinf.〕的前3行
(Page4-100)
编辑拼块原点信息子文件〔blockrepeatinf.〕
(Page5-5)
编辑PCB信息子文件〔pcbinf.〕的剩余行
(Page4-100)
编辑局部标记信息子文件〔localfid.Markinf.〕
(Page5-28)
编辑局部坏标记信息子文件〔localbadmarkinf.〕
(Page5-41)
编辑贴装信息子文件〔mountinf.〕
(Page4-110)只需编制第一拼块即可
检查、存盘、退出编辑优化条件设置,并执行程序优化
(Page4-116)
该流程增加了拼块概念。
由于有了拼块概念后,PCB信息子文件中的块标记点(blockfid.)和坏块标记点(blockbadmark)将有可能被使用,而它们以及贴装信息子文件中的贴装点坐标都以第一拼块原点为坐标原点,所以一定要在它们之前编制拼块原点信息子文件(blockrepeatinf.)。
在前面PCB原点与拼块原点的关系中曾提到假设将PCB原点设定到第一拼块的拼块原点,则第一拼块的拼块原点坐标值应该设为〔0,0〕。
而在编制拼块原点信息子文件前,拼块原点子程序内的拼块原点坐标缺省值也是〔0,0〕。
因此,如果将PCB原点设定到第一拼块原点且重合,则编程流程可以简化如下:
创建并选择PCB文件
YVL88IIOperationManual
(Page4-5)
编辑原器件信息子文件〔componentinf.〕
(Page4-10)
编辑标记信息子文件〔markinf.〕
(Page4-83)
编辑PCB信息子文件〔pcbinf.〕
将PCB原点设定到第一拼块原点且重合,读取坐标
(Page4-100)
编辑拼块原点信息子文件〔blockrepeatinf.〕
第一拼块原点坐标一定为〔0,0〕,
(Page5-5)
编辑局部标记信息子文件〔localfid.Markinf.〕
(Page5-28)
编辑局部坏标记信息子文件〔localbadmarkinf.〕
(Page5-41)
编辑贴装信息子文件〔mountinf.〕
(Page4-110)只需编制第一拼块即可
检查、存盘、退出编辑程序优化条件设置,并执行优化
(Page4-116)
三、编程细节
程序编辑中元件信息子文件和标记信息子文件是最基本的文件,其他子文件要调用这两个子文件中的内容〔序号〕;同时也是编程的重点和难点。
以下将主要介绍这两个子文件中的各项设定。
1.元件信息子文件〔COMP。
INF。
〕
元件信息子文件中,左侧的主视窗定义元件的序号和名称。
序号表示第几种元件,而非料站号。
序号将在贴装信息子文件中被调用。
一种元件可以有多个序号和相同的名称,且可以转换。
实际编程时,一种元件只编制一个序号即可,假设该种元件的贴装数量比较多而担忧换料频繁则可以在程序优化时设定将其分放〔MultiPlay〕为N种,程序将会自动添加〔N-1〕种元件且将贴装信息子文件中的相应元件序号分为N种。
右侧视窗为子视窗,包括用户项目子视窗(UserItems)、吸料贴装子视窗(Pick&Mount)、元件形状子视窗(Shape)、视觉参数子视窗(Vision)和料盘参数子视窗(Tray)〔只有盘装料才会自动出现此子视窗〕。
A.用户项目子视窗(UserItems)。
主要定义元件的包装形式(Comp.Package)、喂料器类型(FeederType)、数据库号(DatabaseNo.)、是否允许料站优化(Usefeederopt)、所用吸嘴类型(RequiredNozzle)、识别元件所用发光体选择(AlignmentModule)、料站号(FeederSetNo.)、吸料位置的定义方法和料站位置坐标〔Pos.Definition,Feederpos_Xmm,Feederpos_Ymm〕、以及元件转换(Alt.Comp)等。
*包装形式(Comp.Package)有带装(Tape)、管装(Stick)、散料盒装(Bulk)和盘装(Tray)。
*喂料器类型(FeederType)有各种带式喂料器、各种散料喂料器、多管喂料器、宽型多管喂料器、各种单管喂料器、各种高速管式喂料器、各种堆桟式管式喂料器、固定盘式喂料器(FixedTF即ManualTrayFeeder)、自动盘式喂料装置(AutoTC即ATS27A)、外部盘式喂料机(Ext.TC即YTF100A或YTF31A或YTF80W)。
只显示包装形式定义的类型的各项选择。
例如一个片式2125电容,包装形式定义为带装,则喂料器类型的显示只有各种规格的带式喂料器,用户自己选择与来料相对应的规格,2125电容一般用8MMTapeFeeder。
*数据库号(DatabaseNo.)表示与该元件外形尺寸一样的元件在数据库中的编号,例如2125大小的片式电阻在数据库中的编号为502。
输入数据库编号后,按F7键就可将该元件的基本参数都由数据库读过来,而不用再去逐项填写,只需修改个别项目。
个别项目包括包装形式、喂料器类型、料站号、料站位置、元件转换、料盘参数等。
如果数据库中没有相同元件,则可以输入一个相似的元件的数据库编号,读近来然后修改各项参数。
并可以再输入一个空内容的数据库编号,按SHIFT和F7键将该形元件保存〔回写〕到数据库中,以备以后调用。
注意:
如果该编号处有内容,则将被新内容覆盖掉,所以一定要输入一个空内容编号再回写到数据库中。
数据库的前499个编号供用户编写,500以后为YAMAHA标准数据。
*是否允许料站优化(Usefeederopt)表示程序优化时是否允许对该种元件已定义过的料站号进行变化,以节省工作时间提高工作效率。
一般来讲,如果料站位置定义为自动或相关时,可以允许料站优化即选YES;假设为示教则不允许进行料站优化即选NO。
*所用吸嘴类型(RequiredNozzle)表示选择何种类型吸嘴来吸取该元件。
一般来说要根据元件尺寸大小和形状来定义。
请参考吸嘴元件对应定义表。
另外,如果该元件的参数是由数据库调出,最好能对该项加以检查。
*识别元件所用发光体选择(AlignmentModule)表示以何种发光形式对元件进行照明。
该项目只在YVL888II中定义。
共有三种方式:
激光(Laser)、背光(Back)和前光(Fore)。
激光多用于识别片式元件、SOT、SOP、SOJ、PLCC等外形规则、对管脚不要求检查的元件,特点是速度快。
激光检查是机器标准配制,它只能检查元件本体,而不能检查管脚。
背光不对片式元件和底部球形元件进行检查,机器标准配置中配备背光,且可用于任合一个元件识别镜头。
前光可以检查任何元件,但为选件。
如果某个镜头上没有配备前光发光体而编程中编制使用前光,且该元件只有该镜头才能识别,则程序优化或用该程序进行生产时将会出现错误报警不能继续进行。
该项目共有8种参数以供选择,后种比前种优先。
例如,选Back&Laser时,机器将使用激光方式。
*料站号(FeederSetNo.)定义该种元件的喂料器放到哪个料站上,即喂料器底部的两个柱放进哪号料站的孔中,默认值为0有特殊意义〔参考程序优化章节中的喂料器优化条件BLKCOND2〕。
固定盘式喂料器的料站号为定值,要记住。
如果多种元件定义到同一个料站上,则必须将这些种元件都设定为允许喂料器优化。
编程时只需定义使用固定盘式喂料器和多管式喂料器的元件以及想要在固定料站放置的元件的料站号,其他元件只需设定为允许喂料器优化即可〔不用设定料站号〕。
*吸料位置的定义方法和料站位置坐标〔Pos.Definition,Feederpos_Xmm,Feederpos_Ymm〕。
吸料位置的定义方法有自动(Automatic)、示教(Teaching)和关连(Relative)三种。
自动指机器将直接调用机器参数中已定义好的该号料站的吸料坐标,用户将不能对其进行修改。
示教是指利用标记识别摄像头或贴装工作头对吸料位置进行示教,读取吸料位置的机器坐标,如果选择示教,则不能对其进行优化。
盘式喂料只能选择示教。
注意:
自动和手动盘式喂料器的吸料位置是指由机器前方看靠近人的一边的左手的〔左前角〕第一个元件的中心;外部盘式喂料机的吸料位置是指靠近YTF100A或YTF80W的拾放头原点的左前角的第一个元件的中心。
关连主要用在多管喂料器,料站位置坐标〔Feederpos_Xmm,Feederpos_Ymm〕是相对于该料站默认吸料即定义为自动时的位置点X和Y的距离。
例如,选择关连时,如果料站位置坐标为〔0,0〕,则意味着该点与自动时的吸料位置重合。
由于多管喂料器上可以放置多种元件,如果都采用这种设定,那么优化时这些元件将能够同时移动。
后
前
左料盘右
*元件转换(Alt.Comp)该种料用完后改吸哪种料,当然这几种料必须是同一种料。
元件转换必须形成闭合。
例如,元件信息子文件中第1、2、3行是同一种元件,则可以设定第一行的元件转换为2,第二行为3,第三行为1。
B.吸料贴装子视窗
可以单独设定某种元件的吸料和贴装方面的参数,以便适应该种料的特点,使吸料和贴装完成的更加顺利。
*吸料角度(Pickangle)定义吸嘴吸料前的角度,吸完料后吸嘴又回到0度。
设置这个参数是为了使元件检测时元件的方向与所定义元件形状中的NSEW一致。
一般带装片式料选0度吸料。
三极管选0〔N2S1〕或180〔N1S2〕。
而SOP元件比较复杂,有三种可能性。
SOP元件在检测时要检测EW方向上的管脚。
如以下图左〔管脚在垂直方向上〕管脚在EW方向上,与元件形状定义相同,所以吸料角度设为0度;特殊带装料〔以下图中〕如某些TSOP及管式料如以下图右〔管脚在水平方向上〕就要设为90或-90度,吸嘴以90或—90度吸料后又转回到0度,这时候元件管脚将转到EW方向,与元件形状定义相同。
其它种类元件如其他带装料和盘装料请参考SOP情况加以分析。
请参考YVL88IIOperationManualP4-26和4-68:
PickAngle来了解吸料角度与识别和贴装角度的关系。
E
SN
W
机器内部方向
带装0度带装±90度管装±90度
*吸料和贴装时间(PickTimer,MountTimer)定义在吸料和贴装时吸嘴在下位停留的时间。
一般对圆柱状或外表不够平但重量大的元件,选择一个吸料时间。
对圆柱状或其他重心不太稳的元件选择一个贴装时间。
*吸料和贴装高度(PickHeight,MountHeight)定义在吸料和贴装时吸嘴下降的高度额外值,即在标准的吸料或贴装高度上再下降多少。
正值表示多向下,负值表示少向下。
吸料高度过大会损坏吸嘴,过小则吸嘴不能接触元件而吸料不好。
一般纸带料吸料高度为0,而塑料带吸料高度为—1,Bulk喂料器的吸料高度为负的元件高度值。
贴装高度一般设为。
*扔料位置(DumpWay)是指将检测不通过的元件扔放到什么地方。
可选扔进废料盒(DumpPos),放到回收站(Station)和放回到该元件的托盘中的吸料位置(DumpBack)。
片式或管脚比较坚硬的元件可选废料盒;要求对元件管脚加以保护时如细间距IC选回收站,但回收站是选件;回放到吸料位置最好不要用以免将元件管脚损坏。
*贴装方式(MountAction)是指以何种方式将元件识别贴装到PCB上。
共有三种方式:
Normal、QFP和FINE。
NORMAL通常用于片式元件,使用的检测部件为激光或扫描式摄像头,精度最低,速度最快。
QFP通常用于IC,使用的检测部件为扫描式摄像头或点阵式摄像头,检测过程为以0度检测元件得到XYθ偏差然后移动到贴装位置转到贴装角度进行贴装。
FINE方式最为精确,但速度最慢,只能使用点阵式摄像头。
FINE方式以贴装角度检测角度偏差并进行转动补偿,然后再进行检测,之后移动到贴装位置进行贴装。
*真空检测(VacuumCheck)是指以何种方式检查吸料和贴装时的真空。
分为常规检测(normalcheck)、严格检测(specialcheck)和不检测(none)三种情况。
常规检测用于常规小元件;严格检测用于IC等;不检测仅用于特殊的例如漏气多的元件。
真空检测参考值为以下的吸料百分比和贴装百分比。
*吸料真空检测(pickupvacuum)和贴装真空检测(mountvacuum)以百分比表示。
具体含义如以下图所示。
100%
0lowerref.Highref.255
说明:
常压时真空为0,绝对真空时为255,即真空被分为255级。
Lowerref.为真空产生但不吸元件时的真空检测值,Highref.为元件吸着很好漏气很少时的真空检测值〔由于真空管路上有其他漏气的地方,所以不能到达255〕。
Highref.与lowerref.的差值被看做为100%。
Pickupvacmountvac
0lowerref.Highref.255
说明:
吸料真空检测参数表示吸料时如果真空检测值到达参数定义的百分比所对应的真空值,则机器认为已吸好该元件,头部将升起准备做下一个动作;从左向右值由小到大,值越大则头在下位停留时间越长。
贴装真空检测参数表示贴装时如果真空检测值下降到达参数定义的百分比所对应的真空值,则机器认为已贴装好该元件,头部将升起准备做下一个动作;从右向左值由小到大,值越大则头在下位停留时间越长。
注意:
吸料真空检测参数与贴装真空检测参数的和不能超过100,且可以用辅助调整“F6”功能来设定合适的参数值。
说明:
合适的参数设定应该使元件辅助调整功能中吸料检测到达上图的图样。
由此可见,假设要确保元件吸好贴装好,对外表平整的重量轻的元件吸料真空检测参数可以设定小一些如30〔%〕;对外表不平整如圆柱状元件或重量大的元件吸料真空检测参数可以设定大一些如40〔%〕以便吸上吸好该元件。
而贴装真空检测参数的设定对外表平整的重量轻的元件参数可以大一些如60〔%〕以便元件确实被贴装而不又被吸起;对外表不平整如圆柱状元件或重量大的元件吸料真空检测参数可以设定小一些如50〔%〕。
C.视觉参数子视窗〔Vision〕
该子视窗定义视觉方面的参数,如元件识别类型、发光亮度、元件成像的灰度门坎值、允许偏差和搜索范围等。
*元件识别类型(AlignmentType)表示以何种形状算法来对该元件进行套用识别。
例如对一个SOP28元件,应选用“SOP”类型,机器将会用SOP元件的外型特点及在元件形状中所定义的尺寸来检测该元件。
元件识别类型有多种,请参考元件识别类型定义资料。
*发光亮度(lightinglevel)表示以何种发光亮度去照射元件,对背光和前光有效,且分为8级,1/8—8/8亮度逐渐增大。
假设要对元件的进行良好识别,亮度值要合适,并非越大越好,且与灰度门坎值有关系。
可以用辅助调整“F6”功能来自动调整。
*元件成像的灰度门坎值(CompThreshold)是指设定一个灰度检测值,使所得到的元件检测成像符合元件识别类型和元件形状信息子视窗中所定义的各项参数。
分为255级,且不队激光检测起作用。
例如,对一个QFP元件,用前光和阵列CCD进行照明识别,假设该参数设定为1,则该元件的成像的所有部分将都被判定为亮,从而无法分辨检测出管脚;假设该参数设定为255,则该元件的成像的所有部分将都被判定为暗,


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 雅马哈贴片机 操作手册
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 #2机组现场施工用电布置措施.docx
#2机组现场施工用电布置措施.docx
-
《个人贵金属质押借款合同》兴业银行.docx
-
《科学发展观和小康社会的经济建设》复习导学案.docx
-
《我和祖父的园子》第一课时教案两篇word.docx
-
《质量》教学案例与设计.docx
-
2惠农小册子.docx
-
7A版个人与团队模拟考试题及答案.docx
-
10篇新部编四年级下册语文课内外阅读理解专项练习题及答案.docx
-
16初四物理热和能知识点总结精讲.docx
-
20XX社会语言经典语录流行风暴.docx
-
48篇教学案例分析报告题.docx
-
《电子工厂安全管理制度汇总》.docx
-
《机械制造课程设计》指导.docx
-
《钱学森》教案第二课时.docx
-
《边城》读后感5篇.docx
-
《固定式压力容器安全技术监察规程》.docx
-
《论雷峰塔的倒掉》.docx
-
《手术台就是阵地》教学设计三年级语文下册.docx
-
《夏洛的网》课外阅读教学设计.docx
-
《自己的花是让别人看的》教案.docx
-
3C检查表090429.docx
-
7客运专线CRTSⅡ型板式无砟轨道施工工法.docx
-
《笔算除法》课时教案设计.docx
-
11#楼高大模板支撑体系专项方案.docx
-
17科学分析经济形势.docx
-
《电流和电路》易错题精讲综合检测题与答案.docx
-
《会计信息系统》习题含答案.docx
-
《汽车电器设备与维修》发电机分教考分离试题及标准答案.docx
-
《四川省排污许可证管理暂行办法》.docx
-
《新编实用英语》教案第一册Unit.docx
-
0母版锅炉值班员计算题WORD版.docx
-
3年级下册英语单词记忆人教版.docx
-
消防安全技术实务整理0709解析.docx
-
口号标语之工地质量安全口号.docx
-
自考公共关系学第六章练习题.docx
-
物流部年度工作目标.docx
-
基于Web Quest高中化学教学设计的实践研究.docx
-
四川省泸州市泸县第一中学学年高一上学期期末模拟历史试题 Word版含答案.docx
-
中国工商银行招聘笔试题柜员类含答案模拟题.docx
-
一级建造师机电实务真题要点.docx
-
学年度职业发展协会社会实践部年度工作总结.docx
-
最新精选舒城县学年度高一第一学期期末质检语文试题精校版.docx
-
政治教案事物发展的状态.docx
-
极力推荐专用设备制造业行业分析报告精品分析报告.docx
-
湖南定额99计算规则文本.docx
-
工装装修合同范本5篇.docx
-
会计监督会计机构人员法律责任.docx
-
高压水除鳞主要技术要求.docx
-
蒋梦麟.docx
-
劳动模范事迹材料范文4篇.docx
-
临床医学检验技士考试辅导第三章 脂代谢及高脂血症的检查练习题.docx
