 材料分选实验报告.docx
材料分选实验报告.docx
- 文档编号:30225506
- 上传时间:2023-08-07
- 格式:DOCX
- 页数:29
- 大小:808.97KB
材料分选实验报告.docx
《材料分选实验报告.docx》由会员分享,可在线阅读,更多相关《材料分选实验报告.docx(29页珍藏版)》请在冰豆网上搜索。
材料分选实验报告
TVT-99B材料分拣系统
系统介绍
99B材料分拣系统简介
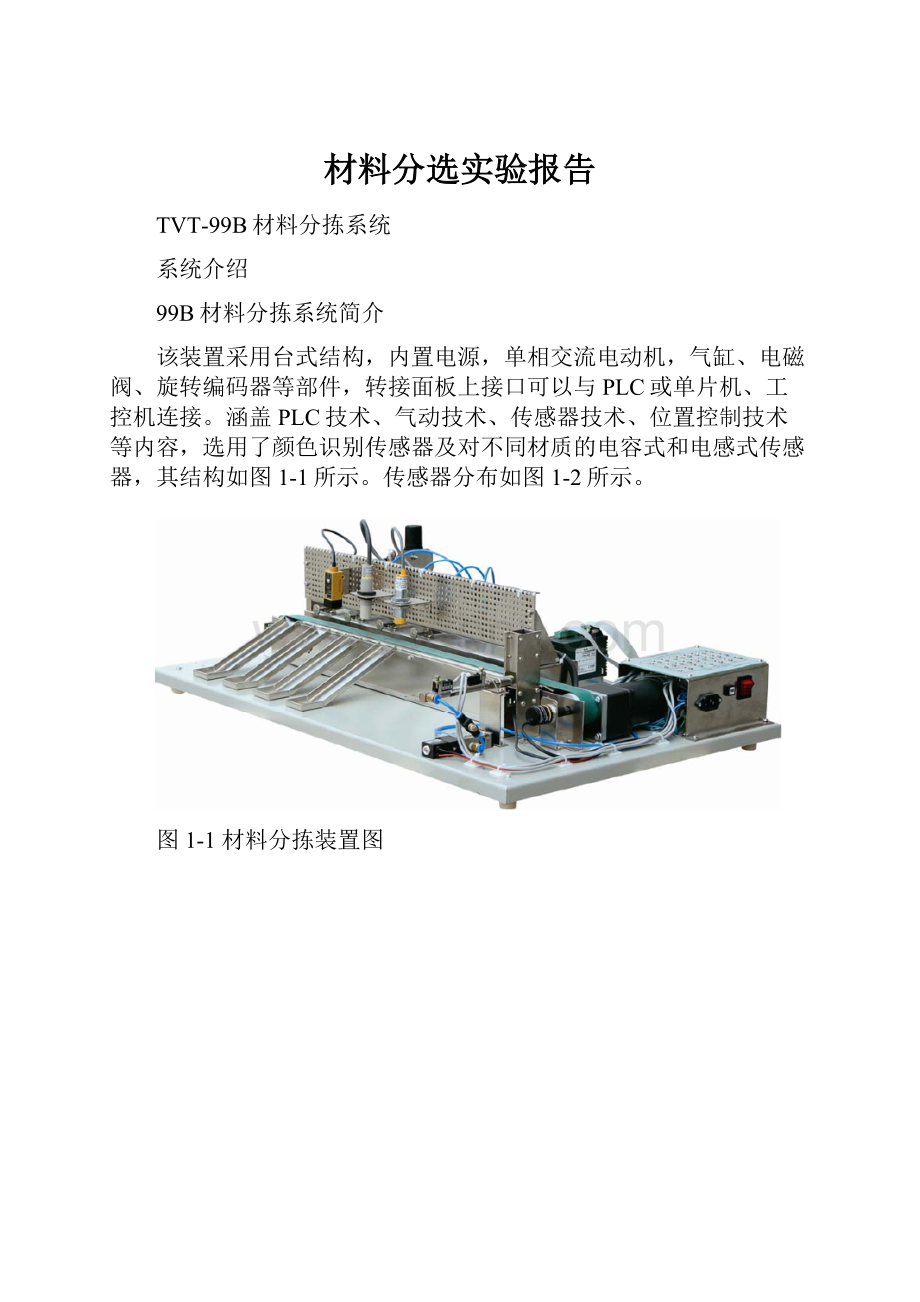
该装置采用台式结构,内置电源,单相交流电动机,气缸、电磁阀、旋转编码器等部件,转接面板上接口可以与PLC或单片机、工控机连接。
涵盖PLC技术、气动技术、传感器技术、位置控制技术等内容,选用了颜色识别传感器及对不同材质的电容式和电感式传感器,其结构如图1-1所示。
传感器分布如图1-2所示。
图1-1材料分拣装置图
图1-2传感器位置分布图
在接通电源之前,请注意:
1)确然电源接线、输入/输出接线和电压是正确;
2)确认控制单元是处于停止工作状态。
接下来也介绍传感器技术和气动技术。
传感器是与人的感觉器官相对应的元件。
国家标准GB7665-87对传感器下的定义是:
“能够感受规定的被测量并按照一定的规律转换成可用输出信号的器件或装置,通常由敏感元件和转换元件组成”。
敏感元件,是指传感器中能直接感受或响应被测量(输入量)的部分;转换元件,是指传感器中能将敏感元件感受的或响应的被探测量转换成适于传输和(或)测量的电信号的部分。
图1.3所示为传感器组成方块图,此图也说明了传感器的基本组成和工作原理。
图1.3传感器组成方块图
传感器种类繁多,功能各异。
由于同一被测量可用不同转换原理实现探测,利用同一种物理法则、化学反应或生物效应可设计制作出检测不同被测量的传感器,而功能大同小异的同一类传感器可用于不同的技术领域,故传感器有不同的分类法。
(1)根据传感器感知外界信息所依据的基本效应,可以将传感器分成三大类:
基于物理效应如光、电、声、磁、热等效应进行工作的物理传感器;基于化学反应如化学吸附、选择性化学反应等进行工作的化学传感器;基于酶、抗体、激素等分子识别功能的生物传感器。
(2)按工作原理分类,可分为应变式、电容式、电感式、电磁式、压电式、热电式等传感器。
(3)根据传感器使用的敏感材料分类,可分为半导体传感器、光纤传感器、陶瓷传感器、金属传感器、高分子材料传感器、复合材料传感器等等。
(4)按照被测量分类,可分为力学量传感器、热量传感器、磁传感器、光传感器、放射线传感器、气体成分传感器、液体成分传感器、离子传感器和真空传感器等等。
(5)按能量关系分类,可分为能量控制型和能量转换型两大类。
所谓能量控制型是指其变换的能量是由外部电源供给的,而外界的变化(即传感器输入量的变化)只起到控制的作用。
如用电桥测量电阻温度变化时,温度的变化改变了热敏电阻的阻值,热敏电阻阻值的变化使电桥的输出发生变化(注意电桥的输出是由电源供给的)。
(6)按传感器是利用场的定律还是利用物质的定律,可分为结构型传感器和物性型传感器。
二者组合兼有两者特征的传感器称为复合型传感器。
场的定律是关于物质作用的定律,例如动力场的运动定律、电磁场的感应定律、光的干涉现象等。
利用场的定律做成的传感器,如电动式传感器、电容式传感器、激光检测器等。
物质的定律是指物质本身内在性质的规律。
例如弹性体遵从的虎克定律、晶体的压电性、半导体材料的压阻、热阻、光阻、湿阻、霍尔效应等。
利用物质的定律做成的传感器,如压电式传感器、热敏电阻、光敏电阻、光电管等。
(7)按依靠还是不依靠外加能源工作,可分为有源传感器和无源传感器。
有源传感器敏感元件工作需要外加电源,无源传感器工作不需外加电源。
(8)按输出量是模拟量还是数字量,可分为模拟量传感器和数字量传感器。
下面就几种常用的的传感器来讲解一下传感器的工作原理及特性。
1.2光电耦合器件
光电耦合器件是一种光电结合的器件。
从结构上看,就是将发光元件和受光元件完全封装起来,并将外部光线加以遮断的元件。
常用硅光电三极管作受光部分,砷化镓发光二极管作发光部分。
发光二极管不属于传感器的范围,这里略加介绍。
发光二极管(LED)是靠注入PN结的载流子自发跃迁产生的自发辐射发光的。
发射的是相干光,波长在可见光或红外光区域。
发光二极管的开启电压约为1~2V,发光亮度与流过管子的电流密度有关。
光电耦合器件工作时,在输入端接入电信号,使发光器件发光,而受光器件管芯在此光辐射的作用下输出光电流。
通过电-光、光-电两次转换,进行输入端和输出端之间的电的耦合。
图1.5为一种光电三极管和发光二极管组合的光电耦合器件的结构和外形。
这种器件能将输出和输入进行完全的电气隔离,以消除漏电流的影响,同时还可以使输入和输出完全没有反馈。
另外,它还具有独立选择输入阻抗和输出阻抗的优点。
输入与输出之间有1011~1012Ω的高绝缘电阻,其分布电容只有几皮法,这就大大增强了器件的抗干扰能力和隔离性能。
1.3半导体色敏传感器
半导体色敏传感器可用来直接测量从可见光到红外波段内单色辐射的波长。
半导体色敏传感器的结构如图1.3(a)所示。
它有两个深浅不同的PN结,形成反向连接的两个光电二极管PD1和PD2,故又称为双结光电二极管。
当外部光照射到色敏器件上时,P1层吸收光子产生电子—空穴对,电子扩散到P1N结,形成电流I1。
在N层中吸收透过P1层的长波光,产生电子—空穴对,其中一半向P1层一侧扩散,另一半向P2层一侧扩散,分别形成电流I2和I3。
到达P2层的红外光区域的光在这里被吸收,产生电子,扩散到P2N结,形成电流I4。
光电二极管PD1和PD2的短路电流Isc1和Isc2为
光电二极管的光谱特性与PN结的结深有关,在靠近表面的PN结的PD1对短波长的光比较灵敏,而远离表面的PN结的PD2对长波长比较灵敏。
上面的一个PN结距离上表面约0.5μm,对580nm波长具有峰值灵敏度,距上表面深度为10μm的另一PN结,对900nm波长具有峰值灵敏度。
为了测定入射光的波长,仅有这两个光电二极管的光谱灵敏度特性曲线还不够。
为此,将这两个光电二极管等效电路串联连接,先取出PD1的短路电流Isc1及PD2的短路电流Isc2,然后测出它们的电流比Isc2/Isc1,如图3.58(b)所示。
该短路电流比与波长有一一对应的关系,如图3.60所示。
因此,如果测出短路电流比,就可以求出对应的入射光的波长,即可分辨出不同的颜色。
1.4电感式传感器
电感式传感器的结构原理图如下图所示。
它由线圈1、铁芯2和衔铁3三部分组成,在铁芯和衔铁之间留有空气隙δ。
被测物与衔铁相连,当被测物移动时通过衔铁引起空气隙变化,改变磁路的磁阻,使线圈电感量变化。
电感量的变化通过测量电路转换为电压、电流或频率的变化,从而实现对被测物位移的检测。
气动技术:
气动传动简称气动,是指以压缩空气为工作介质来传递动力和控制信号,控制和驱动各种机械和设备,以实现生产过程机械化、自动化的一门技术。
它是流体传动及控制学科的一个重要分支。
因为以压缩空气为工作介质,具有防火、防爆、防电磁干扰,抗振动、冲击、辐射,无污染,结构简单,工作可靠等特点。
典型的气压传动系统是由气压发生装置、执行元件、控制元件和辅助元件四个部分组成,
如图10-1所示。
气压发生装置简称气源装置,是获得压缩空气的能源装置,其主体部分是空气压缩机,另处还有气源净化设备。
空气压缩机将原动机供的机械能转化为空气的压力能;而气源净化设备用以降低压缩空气中的水分、油分以及污染杂质等。
使用气动设备较多的厂矿将气源装置集中在压气站(俗称空压站)内,由压气站再统一向各用气点(分厂、车间和用气设备等)分配供应压缩空气。
执行元件是以压缩空气为工作介质,并将压缩空气的压力能变为机械能的能量转换装置。
包括作直线往复运动的气缸,作连续回转运动的气马达和作不连续回转运动的摆动马达。
控制元件又称操纵、运算、检测元件,是用来控制压缩空气流的压力、流量和流动方向等,以便使执行机构完成预定运动规律的元件。
包括各种压力阀、方向阀、流量阀、逻辑元件、射流元件、行程阀、转换器和传感器等。
辅助元件是使压缩空气净化、润滑、消声以及元件间连接所示需要的一些装置。
包括分小滤气器、油雾器、消声器以及各种管路附件等。
油雾器是以压缩空气为动力,将润滑油喷射成雾状并混合于压缩空气中,使该压缩空气具有润滑气动元件的能力。
目前,气动控制阀,气缸和气马达主要是靠这种带有油雾的压缩空气来实现润滑的,其优点是方便、干净、润滑质量高。
气压传动装置的噪声一般都比较大,尤其当压缩气体直接从气缸或阀中排向大气,较高的压差使气体体积急剧膨胀,产生涡流,引起气体的振动,发出强烈的噪声,为消除这种噪声应安装消声器。
消声器是指能阻止声音传播而允许气流通过的一种气动元件,气动装置中的消声器主要有阻性消声器、抗性消声器及阻抗复合消声器三大类。
系统的实训实验课题。
课题1:
认识材料分拣装置
项目1、熟悉各器件名称
实验内容:
对照实验装置,找出对应的元器件,并填写相应的规格型号,完成下列表格。
项目2、熟悉接口电路
实验内容:
根据下面的I/O分配表,找出对应的信号线,并观察信号的流向。
课题二、利用PLC的高数计数功能完成材料的分拣功能。
实验一:
控制要求,在出料塔中现有一个货物,要求将其送入到1号仓库。
网络1是初始化高数计数器。
通过将SMB37中传送16#F8,设置高数计数器模式为:
允许计数,写入新的当前值,写入新的预置值,写入计数方向,设置初始计数方向为加计数,启动输入和复位输入高电平有效。
利用高速计数器定义指令HDEF启动高速计数器HSC0,设置其模式为0。
通过将SMB38中传送0,清除当前HSC0的计数当前值。
网络2是用于将高速计数器的当前值送入到VW20中去。
网络3是用于控制出料气缸动作的。
只有气缸处于回位状态,下料传感器检测到出料塔中有货物时,当扫描脉冲信号到来时,下料气缸动作,动作到其限位状态时,气缸停止动作。
网络4是用于控制传送带动作的。
当下料气缸开始动作时,传送带启动,直到推气缸1
动作时,传送带才停止运行。
网络5是用来控制推气缸动作。
当货料出库时,高数计数器的当前值就记录了货料的位置,因此当1号仓库所处位置的脉冲坐标值HL1等于货料到达1号仓库的脉冲值L1,即L1=HL1(其中L1表示控制入库的脉冲值,HL1表示1号仓库所处位置的脉冲坐标值。
)时,气缸1动作,将货料推入到1#仓库中去。
(2)实验操作步骤
1)对照上述梯形图编写程序,然后下载到PLC中去。
2)按照要求完成系统动作,观察动作是否正常,如果不正常,利用信号流向法排擦错误。
3)写出实验报告。
(3)思考题
1)如果系统中的货物数目大于1个,要求所有货物均能进入到1#仓库中去,应该如何编写程序?
2)如果1#仓库换成2号仓库,应该如何修改程序?
网络1是初始化高数计数器。
通过将SMB37中传送16#F8,设置高数计数器模式为:
允
许计数,写入新的当前值,写入新的预置值,写入计数方向,设置初始计数方向为加计数,
启动输入和复位输入高电平有效。
利用高速计数器定义指令HDEF启动高速计数器HSC0,设置其模式为0。
通过将SMB38中传送0,清除当前HSC0的计数当前值。
网络2是用于将高速计数器的当前值送入到VW20中去。
网络3是用于控制出料气缸动作的。
只有气缸处于回位状态,下料传感器检测到出料塔
中有货物时,当扫描脉冲信号到来时,下料气缸动作,动作到其限位状态时,气缸停止动作。
网络4是用于控制传送带动作的。
当下料气缸开始动作时,传送带启动,直到推气缸1
动作时,传送带才停止运行。
网络5是用来控制推气缸动作。
当货料出库时,高数计数器的当前值就记录了货料的位置,因此当1号仓库所处位置的
脉冲坐标值HL1等于货料到达1号仓库的脉冲值L1,即L1=HL1(其中L1表示控制入库的脉
冲值,HL1表示1号仓库所处位置的脉冲坐标值。
)时,气缸1动作,将货料推入到1#仓库
中去。
(2)实验操作步骤
1)对照上述梯形图编写程序,然后下载到PLC中去。
2)按照要求完成系统动作,观察动作是否正常,如果不正常,利用信号流向法排擦错误。
3)写出实验报告。
(3)思考题
1)如果系统中的货物数目大于1个,要求所有货物均能进入到1#仓库中去,应该如何编写程序?
2)如果1#仓库换成2号仓库,应该如何修改程序?
实验二:
控制要求:
在出料塔中现有四个货物,要求按下面要求完成实验。
(1)当第一个货物从出料塔中被推出来后,到达1号仓库时,推料气缸动作将其入库。
(2)当第二个货物从出料塔中被推出来后,到达2号仓库时,推料气缸动作将其入库。
(3)当第三个货物从出料塔中被推出来后,到达3号仓库时,推料气缸动作将其入库。
(4)当第四个货物从出料塔中被推出来后,到达4号仓库时,推料气缸动作将其入库。
例题解释:
根据题目要求,参照系统的I/O分配表,编写程序如下所示:
实验二:
控制要求:
在出料塔中现有四个货物,要求按下面要求完成实验。
网络1是初始化高数计数器。
通过将SMB37中传送16#F8,设置高数计数器模式为:
允许计数,写入新的当前值,写入新的预置值,写入计数方向,设置初始计数方向为加计数,启动输入和复位输入高电平有效。
利用高速计数器定义指令HDEF启动高速计数器HSC0,设置其模式为0。
通过将SMB38中传送0,清除当前HSC0的计数当前值。
网络2是用于将高速计数器的当前值送入到VW20中去。
网络3是用于制作一个脉冲信号,信号的周期为5S,当系统运行时,脉冲发生器开始工作。
这个脉冲信号是用于检测出料塔中是否有货物,每隔5S进行一次扫描。
网络4是用于控制出料气缸动作的。
只有气缸处于回位状态,下料传感器检测到出料塔中有货物时,当扫描脉冲信号到来时,下料气缸动作,动作到其限位状态时,气缸停止动作。
网络5是用于控制传送带动作的。
当下料气缸开始动作时,传送带启动,直到推气缸4动作时,传送带才停止运行。
网络6到网络9是用来分别控制4个推气缸动作。
由于题目要求采用通过旋转编码器的脉冲值来控制每个货料的入库情况,这就要求系统能够识别不同货料的当前位置。
当第一个货料出库时,高数计数器的当前值就记录了货料的位置,因此对于第一个货料入库控制,只要求1号仓库所处位置的脉冲坐标值HL1等于货料到达1号仓库的脉冲值L1,即L1=HL1;其中L1表示控制入库的脉冲值,HL1表示1号仓库所处位置的脉冲坐标值。
当第二个货料出库时,由于其出库时间比第一个货料晚5S,因此对于它的入库控制,要求在3号仓库所处位置的脉冲坐标值HL2加上传送带在5S内所行走的脉冲值,即L2=HL2+Li,Li表示传送带在5S内所行走的脉冲值。
同理,第三个货料入库的脉冲值,等于3号仓库所处位置的脉冲坐标值HL3加上传送带在5S内所行走的脉冲值的2倍,即L3=HL3+2Li。
第四个货料入库的脉冲值等于4号仓库所处位置的脉冲坐标值HL4加上传送带在5S内所行走的脉冲值的3倍,即L3=HL4+3Li。
其中HL1、HL2、HL3、HL4可以通过实验的方法测量得出。
当系统高数计数器的当前值HC0等于控制对应气缸的脉冲值时,气缸动作,将货料推入到相应的仓库中去。
网络10是用于系统结束运行时,初始化系统参数,以便系统进行下一轮动作。
(2)实验操作步骤
1)对照上述梯形图编写程序,然后下载到PLC中去。
2)按照要求完成系统动作,观察动作是否正常,如果不正常,利用信号流向法排擦错误。
3)写出实验报告。
(3)思考题
1)如何用实验的方法测量出HL1、HL2、HL3、HL4?
写出实验步骤,并上机实验,写出测量值。
2)如果系统中的货物数目大于4个,要求按照出库顺序依次进入不同的仓库,即要求第5个货料进入1号仓库,第6号货料进入2号仓库,依此类推,应该如何修改程序?
3)如果系统中可用的仓库数为3个,应该如何修改程序?
课题三:
利用传感器的检测技术完成材料的分拣功能.
实验一、控制要求:
系统运行时,传送带启动,当检测到铁质材料时,送入到1号仓库;检
测到铝质材料时,送入到2号仓库;检测到黄色货物时,将其送入到3号仓库。
要求将其送
入到1号仓库。
例题解释:
根据题目要求,参照系统的I/O分配表,编写程序如下所示:
网络1是用来控制传送带运行的,当系统启动时,传送带就会运行。
网络2和网络3是用来控制1号推气缸。
当铁质材料经过时,电感传感器有信号输出时,1号推气缸就会从回位状态运动到限位状态。
在上述梯形图中,系统通过中间继电器来控制推气缸的动作,这是因为气缸动作速度比较快,为了避免传感器检测点与仓库入口位置的差距而设置延长一小段时间。
网络4和网络5是用来控制2号推气缸。
当铝质材料经过时,电容传感器有信号输出时,2号推气缸就会从回位状态运动到限位状态。
网络6和网络7是用来控制3号推气缸。
当黄色货料经过时,颜色传感器有信号输出时,3号推气缸就会从回位状态运动到限位状态。
(2)实验操作步骤
1)对照上述梯形图编写程序,然后下载到PLC中去。
2)按照要求完成系统动作,观察动作是否正常,如果不正常,利用信号流向法排擦错误。
3)写出实验报告。
(3)思考题
1)如何检测蓝色货物?
2)如果电感传感器与电容传感器的位置进行互换,如何分辨出铁质货物和铝质货物?
实验二、控制要求:
现有一堆货物,要求挑选黄色铁质货料送入到3号仓库,黄色塑料货料送入到4#仓库。
例题解释:
根据题目要求,系统要求能够区分铁质和塑料,以及检测出黄色,这需要用到两种传感
器,即颜色传感器和电感传感器,根据现有设备,可以先让系统检测材料的属性,然后再
检测货物的颜色,编写程序如下所示:
在上述梯形图中,中间状态M1.0用于记录货物的材质属性,当物体为铁质时,其状态
为1,否则为0。
中间状态M1.2是用于记录货物的颜色,当货物颜色为黄色时,其状态为1,否则为0。
在网络4中,通过判断M1.0和M1.2的当前状态,可以判断是进入3#仓库还是进入4#仓库。
当系统进入4号仓库时,通过系统延时3.7s,启动4号推气缸将物体送入到4号仓库中去。
(2)实验操作步骤
1)对照上述梯形图编写程序,然后下载到PLC中去。
2)按照要求完成系统动作,观察动作是否正常,如果不正常,利用信号流向法排擦错误。
3)写出实验报告。
(3)思考题
1)如果要求选择的物体为蓝色铁质物品和蓝色铝质货物,应该如何设计程序?
2)如果颜色传感器与电感传感器的位置进行互换,程序又该如何设计?
系统的综合训练
一、实验内容
现有三类货物,分别是铁、铝、塑料材质的货料,每种材质各两个,每种货料均为正方
体,在货料的各个侧面都涂有不同的颜色,分别为红色、黄色、绿色。
为了能够检测出货物
的类别,现配有颜色、电感、电容三个传感器。
要求:
(一)、系统首先能从6个料块中检测出铁质的货料,标志为第一类货物;然后再从余下的4个料块中检测出铝质的货料,标志为第二类货物;最后对于塑料材质的货料,当其顶面(正方体的上底面)为黄色时,检测其为第三类货物,余下的为第四类货物。
(二)、所有货物都从出料塔中进行装载,由系统自动移动到传送带上面,当系统检测到第一类货物时,将其放入到1号仓库;当系统检测到第二类货物时,将其放入到2号仓库;当系统检测到第三类货物时,将其放入到3号仓库;当系统检测到第四类货物时,将其放入到4号仓库。
(三)、系统具有统计功能,能实时统计每个仓库的货料数目,同时也能统计所有装置货物的数目。
二、动作流程
根据系统的要求,现设计系统的流程图如下所示:
1)当系统通电时,各个动作机构回到初始位置,各个气缸处于回位限位状态,传送带开始
运行。
2)当向出料塔中装载货料时,下料传感器SN输出信号,传送带停止运行,下料气缸YV5
动作,将货物推到传送带上面。
3)传送带动作,将货物送到传感器检测区,当电感传感器输出信号时,1号推气缸动作,
将货物送到1号仓库。
4)当电容传感器输出信号时,2号推气缸动作,将货物送到2号仓库。
5)当颜色传感器输出信号时,3号推气缸动作,将货物送到3号仓库。
6)当所有传感器都没有输出信号时,4号推气缸动作,将货物送到4号仓库。
7)当传送带上没有货物时,运行一段时间后系统复位。
8)当推气缸动作时,传送带停止运行,直到气缸处于回位状态。
三I/O分配表
根据系统的流程图,PLC的I/O分配表如下表所示。
四、程序图
TVT-99B材料分拣系统程序如下所示:
BEGIN
Network1//NetworkTitle
//设定高速计数器控制方式,增计数,初始值为0,使用HSC0
LDSM0.1
OM5.2
MOVB16#F8,SMB37
HDEF0,0
MOVD+0,SMD38
HSC0
Network2
LDSM0.0
DTIHC0,VW20
Network3
LDSM0.0
MOVWVW20,VW24
DIV77,VD22
Network4
LDW=VW22,0
AW>VW24,0
=M5.1
Network5
LDM5.1
AW>VW20,400
=M5.2
Network6
LDI1.4
ANC0
=Q0.5
Network7
LDM5.1
LDSM0.1
LDI1.4
EU
OLD
LDI2.4
EU
OLD
CTUC0,7
Network8
LDM5.1
AI2.4
OQ0.4
ANI0.4
=Q0.4
Network9
LDI0.5
OM1.0
ANQ0.0
=M1.0
TONT33,+20
Network10
LDI0.6
OM1.1
ANQ0.1
=M1.1
TONT34,+50
Network11
LDI0.7
OM1.2
ANQ0.2
=M1.2
TONT35,+50
Network12
LDT33
OQ0.0
ANI2.5
=Q0.0
Network13
LDT34
OQ0.1
ANI0.1
=Q0.1
Network14
LDT35
OQ0.2
ANI0.2
=Q0.2
Network15
LDSM0.1
OC0
MOVB16#FF,VB50
Network16
LDM5.1
OM5.3
ANC0
=M5.3
Network17
LDM5.1
EU
AM5.3
SLBVB50,1
Network18
LDM5.1
AI1.4
SV50.0,1
Network19
LDI1.4
EU
R


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 材料 分选 实验 报告
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 #2机组现场施工用电布置措施.docx
#2机组现场施工用电布置措施.docx
-
《个人贵金属质押借款合同》兴业银行.docx
-
《科学发展观和小康社会的经济建设》复习导学案.docx
-
《我和祖父的园子》第一课时教案两篇word.docx
-
《质量》教学案例与设计.docx
-
2惠农小册子.docx
-
7A版个人与团队模拟考试题及答案.docx
-
10篇新部编四年级下册语文课内外阅读理解专项练习题及答案.docx
-
16初四物理热和能知识点总结精讲.docx
-
20XX社会语言经典语录流行风暴.docx
-
48篇教学案例分析报告题.docx
-
《电子工厂安全管理制度汇总》.docx
-
《机械制造课程设计》指导.docx
-
《钱学森》教案第二课时.docx
-
《边城》读后感5篇.docx
-
《固定式压力容器安全技术监察规程》.docx
-
《论雷峰塔的倒掉》.docx
-
《手术台就是阵地》教学设计三年级语文下册.docx
-
《夏洛的网》课外阅读教学设计.docx
-
《自己的花是让别人看的》教案.docx
-
3C检查表090429.docx
-
7客运专线CRTSⅡ型板式无砟轨道施工工法.docx
-
《笔算除法》课时教案设计.docx
-
11#楼高大模板支撑体系专项方案.docx
-
17科学分析经济形势.docx
-
《电流和电路》易错题精讲综合检测题与答案.docx
-
《会计信息系统》习题含答案.docx
-
《汽车电器设备与维修》发电机分教考分离试题及标准答案.docx
-
《四川省排污许可证管理暂行办法》.docx
-
《新编实用英语》教案第一册Unit.docx
-
0母版锅炉值班员计算题WORD版.docx
-
3年级下册英语单词记忆人教版.docx
-
消渴诊疗方案的优化_精品文档Word格式.doc
-
山大西方经济学模拟试题及参考答案1234Word文档下载推荐.docx
-
消毒隔离知识培训_精品文档Word文档下载推荐.docx
-
生猪养殖项目可行性研究报告Word格式文档下载.docx
-
消毒供应室普通器械手工清洗流程_精品文档Word下载.doc
-
人教版一年级上数学电子教案Word下载.docx
-
诗和远方作文800字Word下载.docx
-
医院感染管理基础知识考试及答案文档格式.doc
-
人教版五年级数学上册期末复习计划3篇Word格式.docx
-
山东省济宁市学年高二下学期期末考试物理试题含答案Word下载.docx
-
医院感染管理自查表Word格式.doc
 新标日第4课课件PPT文档格式.ppt
新标日第4课课件PPT文档格式.ppt
-
医院感染应知应会基本知识Word文件下载.docx
-
数学课堂教学开放活动总结Word下载.docx
-
教育心理学-学习策略的学习PPT格式课件下载.ppt
 医院安全生产与消防安全检查表表格推荐下载.xlsx
医院安全生产与消防安全检查表表格推荐下载.xlsx
-
消防污水可行性方案_精品文档文档格式.doc
-
施工组织设计中建三局文档格式.docx
-
消防安全应急预案修订版_精品文档Word文件下载.doc
