 飞行器系统仿真.docx
飞行器系统仿真.docx
- 文档编号:30081489
- 上传时间:2023-08-04
- 格式:DOCX
- 页数:32
- 大小:138.37KB
飞行器系统仿真.docx
《飞行器系统仿真.docx》由会员分享,可在线阅读,更多相关《飞行器系统仿真.docx(32页珍藏版)》请在冰豆网上搜索。
飞行器系统仿真
《飞行器系统仿真与CAD》学习报告
第一部分仿真(40)
题目1:
给定导弹相对于目标的运动学方程组为
r(0)=5km,q(0)=60deg,?
(0)=30deg,V=,Vm=,1Ma=340m/s,k=2
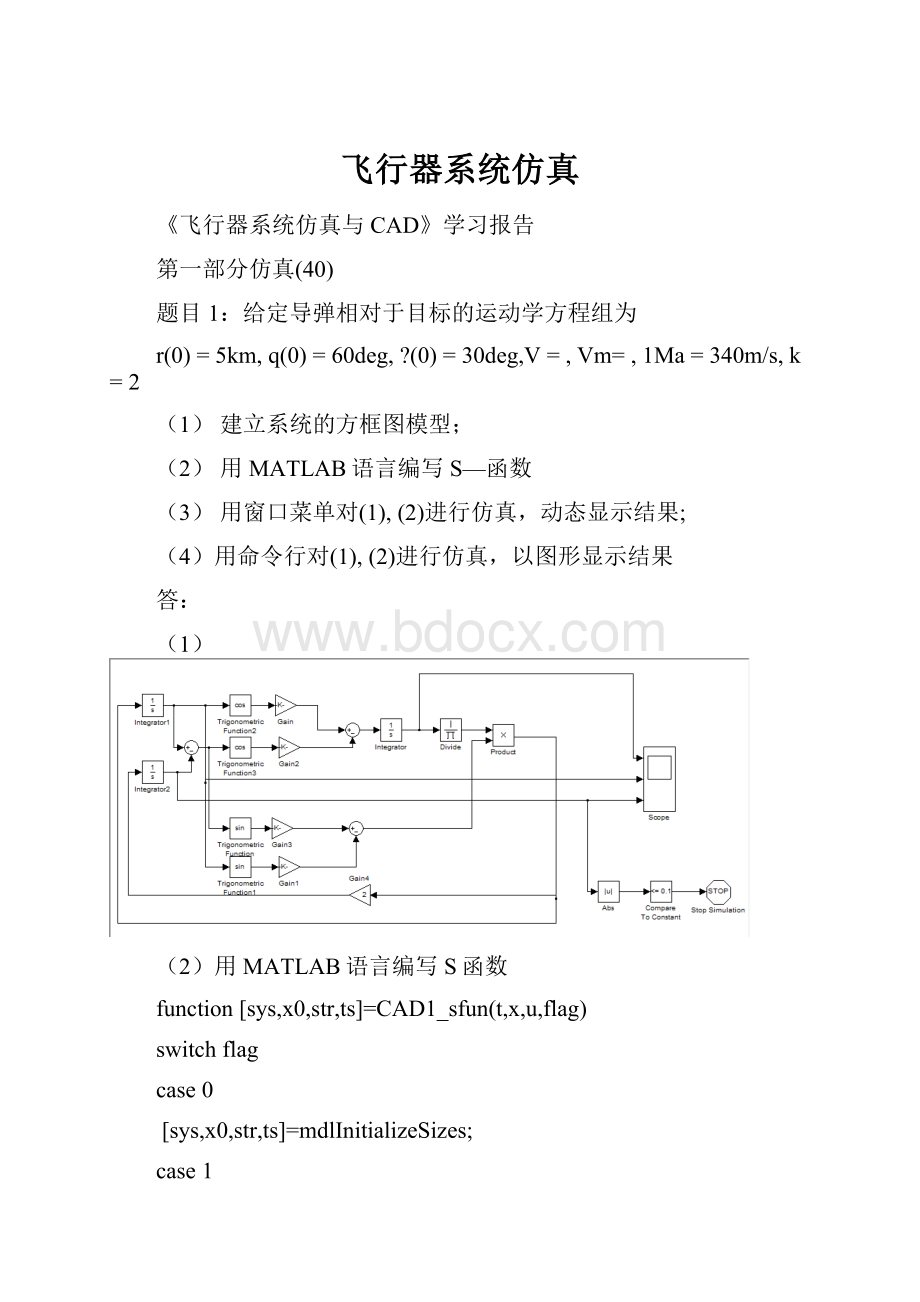
(1)建立系统的方框图模型;
(2)用MATLAB语言编写S—函数
(3)用窗口菜单对
(1),
(2)进行仿真,动态显示结果;
(4)用命令行对
(1),
(2)进行仿真,以图形显示结果
答:
(1)
(2)用MATLAB语言编写S函数
function[sys,x0,str,ts]=CAD1_sfun(t,x,u,flag)
switchflag
case0
[sys,x0,str,ts]=mdlInitializeSizes;
case1
sys=mdlDerivatives(t,x,u);
case3
sys=mdlOutputs(t,x,u);
case{2,4,9}
sys=[];
otherwise
error('unhandledflag=',num2str(flag))
end
function[sys,x0,str,ts]=mdlInitializeSizes
sizes=simsizes;
=3;
=0;
=3;
=0;
=1;
=1;
sys=simsizes(sizes);
str=[];
x0=[5000,pi/3,pi/6];
ts=[00];
functionsys=mdlDerivatives(t,x,u)
vm=*340;
v=*340;
k=2;
dx
(1)=vm*cos(x
(2))-v*cos(x
(2)-x(3));
dx
(2)=(v*sin(x
(2)-x(3))-vm*sin(x
(2)))/x
(1);
dx(3)=k*dx
(2);
sys=dx;
functionsys=mdlOutputs(t,x,u)
sys=x;
调用S函数的模型框图
(3)框图仿真结果:
S函数仿真结果:
(4)命令输入
clear;clc
[tx]=sim('CAD1');
hSimulink=figure();
subplot(3,1,1);
plot(t,x(:
1));grid;ylabel('r');
subplot(3,1,2);
plot(t,x(:
2));grid;ylabel('q');
subplot(3,1,3);
plot(t,x(:
3));grid;ylabel('sigma');
[tx]=sim('CAD1_S');
hSFun=figure();
subplot(3,1,1);
plot(t,x(:
1));grid;ylabel('r');
subplot(3,1,2);
plot(t,x(:
2));grid;ylabel('q');
subplot(3,1,3);
plot(t,x(:
3));grid;ylabel('sigma');
模型仿真结果:
S函数仿真结果:
题目2:
给出动态方程
;
(1)用MATLAB语言编写S—函数;
(2)用命令行gear/adams法对
(1)进行仿真,显示曲线x(t=0:
100);
(3)建立方框图,用RK45仿真50秒,显示曲线
答:
(1)用MATLAB语言编写S—函数
function[sys,x0,str,ts]=CAD2_sfun(t,x,u,flag)
switchflag
case0
[sys,x0,str,ts]=mdlInitializeSizes;
case1
sys=mdlDerivatives(t,x,u);
case3
sys=mdlOutputs(t,x,u);
case{2,4,9}
sys=[];
otherwise
error('unhandledflag=',num2str(flag))
end
function[sys,x0,str,ts]=mdlInitializeSizes
sizes=simsizes;
=2;
=0;
=2;
=0;
=1;
=1;
sys=simsizes(sizes);
str=[];
x0=[1,0];
ts=[00];
functionsys=mdlDerivatives(t,x,u)
dx
(1)=x
(2);
dx
(2)=1-t*x
(1)-(1-x
(1)^2)*x
(2);
sys=dx;
functionsys=mdlOutputs(t,x,u)
sys=x;
(2)直接调用ode数值积分函数进行仿真,系统微分方程:
functiondx=CAD01_02odefun(t,x)
dx
(1)=x
(2);
dx
(2)=1-(1-x
(1)*x
(1))*x
(2)-t*x
(1);
dx=dx';
调用ode解算器入口:
clear;clc;
[tx]=ode15s(@CAD01_02odefun,0:
100,[10]);
hGear=figure();
set(hGear,'NumberTitle','off','Name','IntegratedbytheGearalgorithm','Units','Normalized','Position',[]);
subplot(2,1,1);
plot(t,x(:
1));grid;ylabel('x');
subplot(2,1,2);
plot(t,x(:
2));grid;ylabel('dx/dt');
[tx]=ode113(@CAD01_02odefun,0:
100,[10]);
hAdams=figure();
set(hAdams,'NumberTitle','off','Name','IntegratedbytheAdamsalgorithm','Units','Normalized','Position',[]);
subplot(2,1,1);
plot(t,x(:
1));grid;ylabel('x');
subplot(2,1,2);
plot(t,x(:
2));grid;ylabel('dx/dt');
ode15s(Gear)仿真结果:
ode113(Adams)仿真结果:
(3)建立方框图,用RK45仿真50秒,显示曲线
方框图模型:
仿真结果:
问题3:
质量—弹簧系统,质量M,恢复系数K,阻力系数C,主动力P,动力学方程为
M=1kg,K=4kg/s2,C=100kg/m,g=s2,?
=;;
(1)在原点处用linmod线性化,求线性系统的A,B,C,D;
(2)对线性模型,判断能控性;
(3)对线性模型,求阶跃、脉冲响应曲线;
(4)对原模型进行仿真,P=sin(t)(使用Simulink);
(5)对原模型进行仿真,P=sin(t)(使用ode23)
答:
(1)①线性化时需在模型中制定输入端、输出端(状态),如下图,状态选为位置和速度
②linmod函数应用于该系统会出现奇异,故选用改进的linmod2函数:
clc;clear;
[A,B,C,D]=linmod2('CAD3');
ss0=ss(A,B,C,D);
Co=ctrb(ss0);
[rowcol]=size(A);
isControllable=~(rank(Co,eps)-row);
hStep=figure();
set(hStep,'NumberTitle','off','Name','StepResponse','unit','normalized','Position',[,,,]);
step(ss0);grid;
hImpulse=figure();
set(hImpulse,'NumberTitle','off','Name','ImpulseResponse','unit','normalized','Position',[,,,]);
impulse(ss0);grid;
命令窗口输出结果:
A=
+008*
0
B=
0
1
C=
10
01
D=
0
0
Thesystemiscontrolled
(3)阶跃响应:
脉冲响应:
(4)对原模型进行仿真,P=sin(t)(使用Simulink)
仿真结果:
(5)对原模型进行仿真,P=sin(t)(使用ode23)
系统微分方程:
functiondx=CAD3odefun(t,x)
M=1;K=4;C=100;g=;miu=;
dx
(1)=x
(2);
dx
(2)=(sin(t)-K*x
(1)-sign(x
(2))*(C*x
(2)*x
(2)+miu*M*g))/M;
dx=dx';
仿真入口程:
clc;clear;
options=odeset('RelTol',1e-3,'AbsTol',[1e-55e-5]);
[tx]=ode23(@CAD3odefun,0:
:
10,[00],options);
hode23=figure();
set(hode23,'NumberTitle','off','Name','Integratedbytheode23solver',...
'Units','Normalized','Position',[]);
subplot(2,1,1);
plot(t,x(:
1));grid;ylabel('x');
subplot(2,1,2);
plot(t,x(:
2));grid;ylabel('dx/dt');
仿真结果:
问题4:
给出一个系统,要求生成一个新Simulink模块,实现其功能
(1)Mask功能
(2)s-函数
答:
实现所需功能的S函数
function[sys,x0,str,ts]=CAD01_04sfun_kernel(t,x,u,flag,ul,ur,yl,yr)
switchflag,
case0,
[sys,x0,str,ts]=mdlInitializeSizes;
case3,
sys=mdlOutputs(t,x,u,ul,ur,yl,yr);
case9,
sys=[];
end
function[sys,x0,str,ts]=mdlInitializeSizes
sizes=simsizes;
=0;
=0;
=1;
=1;
=1;
=1;
sys=simsizes(sizes);
x0=[];
str=[];
ts=[00];
functionsys=mdlOutputs(t,x,u,ul,ur,yl,yr)
if(u>=ur+yr)
y=yr;
elseif(u<=ul+yl)
y=yl;
elseif(u>ul+yl)&&(u y=u-ul; elseif(u y=u-ur; else y=0; end sys=y; 在Simulink中将调用S函数的模块进行封装 参数传递及初始化 用户界面: 测试结果 问问题5: 已知系统A=[01;-1-2],B=[10;01],C=[10;01],D=[00;00],求系统的状态空间方程(linmod),并分析系统的稳定性,练习仿真参数设置 答: 对模型进行线性化并分析稳定性 clear;clc; [ABCD]=linmod('CAD5') ss0=ss(A,B,C,D); hpz=figure(); set(hpz,'NumberTitle','off','Name','Pole-zeromapofthelinmodsystem'); pzmap(ss0); sgrid; [rowcol]=size(A); P=lyap(A,eye(row)); fori=1: row subdet(i)=det(P(1: i,1: i)); end subdet 系统零极点图: 存在正实部的极点,系统不稳定。 问题6: 系统的动力学方程为dx/dt=Ax+Bu,y=Cx+Du,A=[0100;0010;0001;-1-2-3-4],B=[12;34;23;45],C=[1122;2354];D=[10;01],求: (1)系统动态平衡点 (2)x(0)=[1111]’,ix=[1234]’,dx=[0101]’,idx=[1234]’,的系统动态平衡点 答: 系统框图模型 系统的平衡点分析 程序 clear;clc; [x,u,y,dx,options]=trim('CAD6'); options(10) x0=[1111];ix=[1234];dx=[0101];idx=[1234]; [x,u,y,dx,options]=trim('CAD01_06',x0',[],[],ix,[],[],dx',idx); options(10) 运行结果 x=[0;0;0;0];u=[0;0];y=[0;0];ans=9 x=[;;;];u=[;];y=[;];ans=41 问题7: 自学文件C与M-s函数模板和示例文件 答: Simulink中的示例文件实现了将输入信号放大为2倍输出的功能,自学时对示例程序进行改进,使之可以指定信号放大的倍数。 语言S函数源代码 #defineS_FUNCTION_NAMECAD02_07sfun /***Modified: changethefunctionname*/ #defineS_FUNCTION_LEVEL2 #include"" staticvoidmdlInitializeSizes(SimStruct*S) { ssSetNumSFcnParams(S,1);/***Revised: setthenumberofinputparameters to1*/ if(ssGetNumSFcnParams(S)! =ssGetSFcnParamsCount(S)){ return; } if(! ssSetNumInputPorts(S,1))return; ssSetInputPortWidth(S,0,DYNAMICALLY_SIZED); ssSetInputPortDirectFeedThrough(S,0,1); if(! ssSetNumOutputPorts(S,1))return; ssSetOutputPortWidth(S,0,DYNAMICALLY_SIZED); ssSetNumSampleTimes(S,1); ssSetOptions(S,SS_OPTION_EXCEPTION_FREE_CODE); } staticvoidmdlInitializeSampleTimes(SimStruct*S) { ssSetSampleTime(S,0,INHERITED_SAMPLE_TIME); ssSetOffsetTime(S,0,; } staticvoidmdlOutputs(SimStruct*S,int_Ttid) { int_Ti; InputRealPtrsTypeuPtrs=ssGetInputPortRealSignalPtrs(S,0); real_T*y=ssGetOutputPortRealSignal(S,0); int_Twidth=ssGetOutputPortWidth(S,0); constmxArray*pmxRatio=ssGetSFcnParam(S,0);/***Revised: getthe pointertotheparameterinthetypeofmxArray*/ constreal_T*pRatio=mxGetPr(pmxRatio);/***Revised: getthepointerto theparameterinthetypeofreal_T*/ for(i=0;i *y++=(*pRatio)*(*uPtrs[i]);/***Revised: themagnifyingratiois acquiredfromtheinputparameter*/ } } staticvoidmdlTerminate(SimStruct*S){} #ifdefMATLAB_MEX_FILE #include"" #else #include"" #endif 封装及用户界面: 问题8自学文件Stateflow示例文件 function[varargout]=stateflow(varargin) %STATEFLOWOpensSIMULINKandcallssfnewwhenappropriate. %Copyright1995-2002TheMathWorks,Inc. ifnargout>0 [varargout{: }]=sf(varargin{: }); else sf(varargin{: }); end Stateflow是有限状态机(finitestatemachine)的图形工具,它可以用于解决复杂的逻辑问题,用户可以通过图形化工具实现在不同状态之间的转换。 Stateflow可以直接嵌入到Simulink仿真模型中,并且在仿真的初始化阶段,SIMULINK会把Stateflow绘制的逻辑图形通过编译程序转换成C语言,使二者有机地结合在一起。 Stateflow可以在SIMULINKExtra模块库中找到。 Stateflow的仿真原理是有限状态机(finitestatemachine)理论,有限状态机是指系统含有可数的状态,在相应的状态事件发生时,系统会从当前状态转移到与之对应的状态。 在有限状态机中实现状态的转移是有一定条件的,同时相互转换的状态都会有状态转移事件,这样就构成了状态转移图。 在SIMULINK的仿真窗口中,允许用户建立有限个状态以及状态转移的条件与事件,从而绘制出有限状态机系统,这样就可以实现对系统的仿真。 Stateflow的仿真框图一般都会嵌入到Simulink仿真模型中,同时实现状态转移的条件或是事件即可以取自Stateflow仿真框图,也可以来自Simulink仿真模型。 第二部分综合(60) 2. J2 HPOP 3采用STK轨道机动模块实现任意两个圆轨道间的霍曼转移 答: 利用轨道转移模块Astrogator,结合轨道机动打靶功能Target实现霍曼转移。 对卫星的Astrogator设置如下的任务控制序列(MSC)。 09May201315: 17: 05 Satellite-Satellite1 AstrogatorMissionControlSequenceSummary --------------------------------------------------------------------------------------------------- ***--------------------------------------------------------------------------*** MCSSegmentType: InitialState Name: InitialState UserComment: -InitialStateDescription- ---------------------------------- SatelliteStateatEndofSegment: ---------------------------------- UTCGregorianDate: 1Jun200312: 00: UTCJulianDate: 2452792 JulianEphemerisDate: Timepastepoch: 0sec(EpochinUTCGregorianDate: 1Jun200312: 00: StateVectorinCoordinateSystem: EarthCenteredMeanJ2000 ParameterSetType: Cartesian X: kmVx: km/sec Z: kmVz: km/sec ParameterSetType: Keplerian sma: kmRAAN: 0deg ecc: w: 0deg inc: 0degTA: 0deg ParameterSetType: Spherical Decl: 0degAzimuth: 90deg OtherEllipticOrbitParameters: Ecc.Anom: 0degMeanAnom: 0deg LongPeri: 0degArg.Lat: 0deg TrueLong: 0degVertFPA: 90deg Vel.RA: 90degVel.Decl: 0deg TimePastPeriapsis: 0sec GeodeticParameters: GeocentricParameters: SpacecraftConfiguration: DragArea: 1e-006km^2 SRPArea: 1e-006km^2 DryMass: 500kg Fuel


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 飞行器 系统 仿真
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 #2机组现场施工用电布置措施.docx
#2机组现场施工用电布置措施.docx
-
《个人贵金属质押借款合同》兴业银行.docx
-
《科学发展观和小康社会的经济建设》复习导学案.docx
-
《我和祖父的园子》第一课时教案两篇word.docx
-
《质量》教学案例与设计.docx
-
2惠农小册子.docx
-
7A版个人与团队模拟考试题及答案.docx
-
10篇新部编四年级下册语文课内外阅读理解专项练习题及答案.docx
-
16初四物理热和能知识点总结精讲.docx
-
20XX社会语言经典语录流行风暴.docx
-
48篇教学案例分析报告题.docx
-
《电子工厂安全管理制度汇总》.docx
-
《机械制造课程设计》指导.docx
-
《钱学森》教案第二课时.docx
-
《边城》读后感5篇.docx
-
《固定式压力容器安全技术监察规程》.docx
-
《论雷峰塔的倒掉》.docx
-
《手术台就是阵地》教学设计三年级语文下册.docx
-
《夏洛的网》课外阅读教学设计.docx
-
《自己的花是让别人看的》教案.docx
-
3C检查表090429.docx
-
7客运专线CRTSⅡ型板式无砟轨道施工工法.docx
-
《笔算除法》课时教案设计.docx
-
11#楼高大模板支撑体系专项方案.docx
-
17科学分析经济形势.docx
-
《电流和电路》易错题精讲综合检测题与答案.docx
-
《会计信息系统》习题含答案.docx
-
《汽车电器设备与维修》发电机分教考分离试题及标准答案.docx
-
《四川省排污许可证管理暂行办法》.docx
-
《新编实用英语》教案第一册Unit.docx
-
0母版锅炉值班员计算题WORD版.docx
-
3年级下册英语单词记忆人教版.docx
-
家居建材城开业活动总结0121.docx
-
家乡的四季优秀作文400字通用11篇.docx
-
假如给我三天光明读后感200字.docx
-
工业洁净车间设计五大要求SICOLAB.docx
-
歌词写作技巧.docx
-
个人年度工作报告范文工作报告.docx
-
给女友未来保证的话语 女朋友胃疼关心的话语.docx
-
工厂合作协议书完整版.docx
-
工程承包合同完整版.docx
-
工程全面预算管理制度.docx
-
工作简报创城.docx
-
工作总结就业再就业工作总结.docx
-
公路工程试验实施细则.docx
-
公文写作公文写作标点符号用法.docx
-
公职人员辞职申请书精选模板.docx
-
骨干教师教坛新秀申报表.docx
-
管道焊接技术标准.docx
-
管理学基础实训教程.docx
-
公园旋转座椅工业设计人机工程学.docx
