 运动控制卡固高卡硬件.docx
运动控制卡固高卡硬件.docx
- 文档编号:29822386
- 上传时间:2023-07-27
- 格式:DOCX
- 页数:22
- 大小:316.13KB
运动控制卡固高卡硬件.docx
《运动控制卡固高卡硬件.docx》由会员分享,可在线阅读,更多相关《运动控制卡固高卡硬件.docx(22页珍藏版)》请在冰豆网上搜索。
运动控制卡固高卡硬件
第三章GT-400-SG运动控制器硬件结构及接线
3.1系统硬件
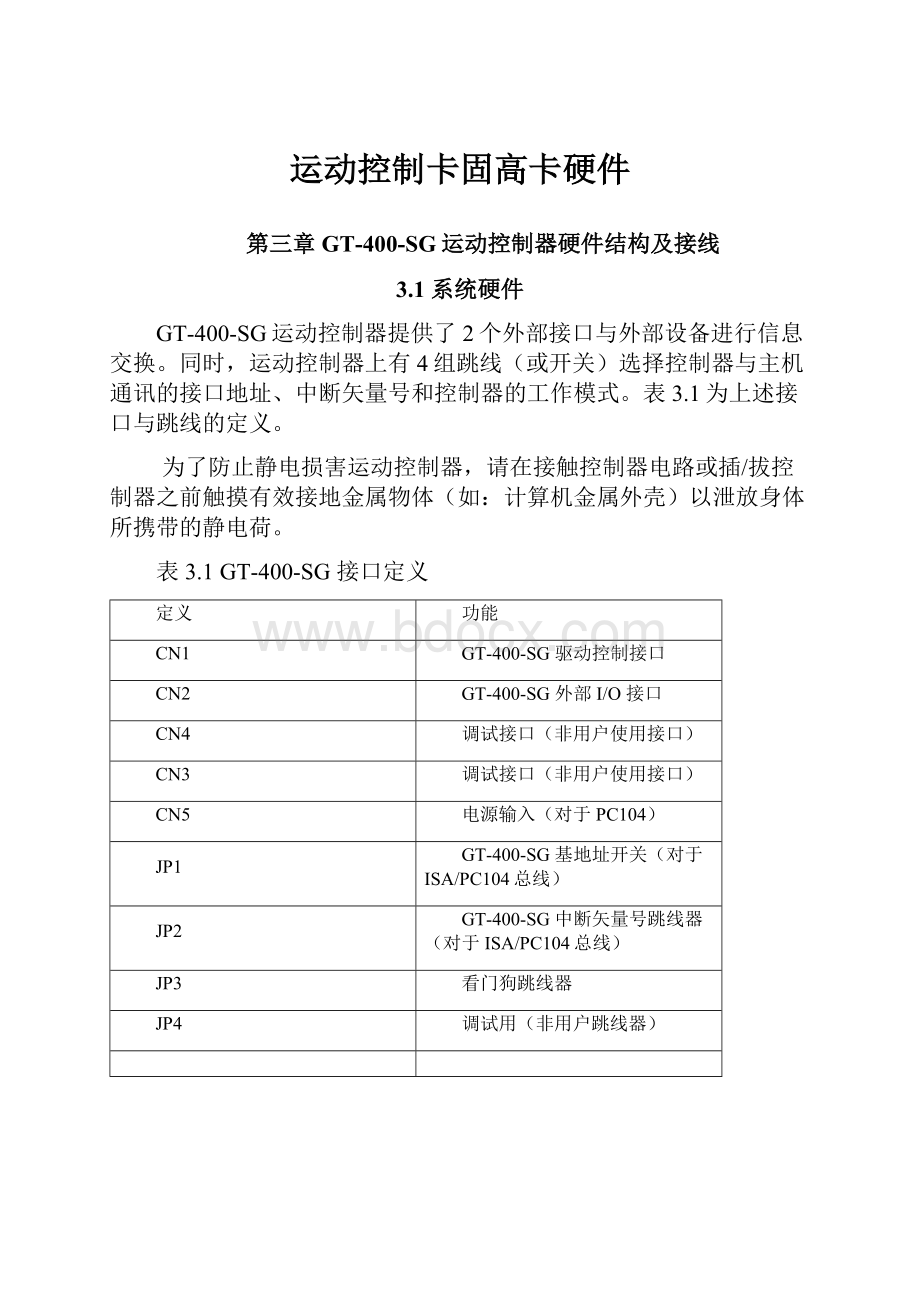
GT-400-SG运动控制器提供了2个外部接口与外部设备进行信息交换。
同时,运动控制器上有4组跳线(或开关)选择控制器与主机通讯的接口地址、中断矢量号和控制器的工作模式。
表3.1为上述接口与跳线的定义。
为了防止静电损害运动控制器,请在接触控制器电路或插/拔控制器之前触摸有效接地金属物体(如:
计算机金属外壳)以泄放身体所携带的静电荷。
表3.1GT-400-SG接口定义
定义
功能
CN1
GT-400-SG驱动控制接口
CN2
GT-400-SG外部I/O接口
CN4
调试接口(非用户使用接口)
CN3
调试接口(非用户使用接口)
CN5
电源输入(对于PC104)
JP1
GT-400-SG基地址开关(对于ISA/PC104总线)
JP2
GT-400-SG中断矢量号跳线器(对于ISA/PC104总线)
JP3
看门狗跳线器
JP4
调试用(非用户跳线器)
3.1.1GT-400-SG主机通讯接口基地址
JP1为GT-400-SG的基地址开关,开关定义如表3.2所示,控制器出厂默认基地址为0x300(16进制)。
运动控制器从该地址起连续占用14个主机I/O地址,实现与主机的通讯。
用户在安装GT-400-SG运动控制器之前,请检查主机地址占用情况以免地址发生冲突,影响系统工作。
表3.3为GT-400-SG运动控制器的基地址跳线选择表。
表3.4提供了PC机已占用的I/O地址,供设置GT-400-SG的基地址时参考。
表3.2JP1基地址开关默认定义
地址编号
定义
A4
ON
A5
ON
A6
ON
A7
ON
A8
OFF
A9
OFF
表3.3GT-400-SG运动控制器基地址开关选择表
基地址(hex)
A9
A8
A7
A6
A5
A4
0x100
ON
OFF
ON
ON
ON
ON
0x120
ON
OFF
ON
ON
OFF
ON
0x140
ON
OFF
ON
OFF
ON
ON
0x160
ON
OFF
ON
OFF
OFF
ON
0x180
ON
OFF
OFF
ON
ON
ON
0x1a0
ON
OFF
OFF
ON
OFF
ON
0x1c0
ON
OFF
OFF
OFF
ON
ON
0x1e0
ON
OFF
OFF
OFF
OFF
ON
0x200
OFF
ON
ON
ON
ON
ON
0x220
OFF
ON
ON
ON
OFF
ON
0x240
OFF
ON
ON
OFF
ON
ON
0x260
OFF
ON
ON
OFF
OFF
ON
0x280
OFF
ON
OFF
ON
ON
ON
0x2a0
OFF
ON
OFF
ON
OFF
ON
0x2c0
OFF
ON
OFF
OFF
ON
ON
0x2e0
OFF
ON
OFF
OFF
OFF
ON
0x300(默认)
OFF
OFF
ON
ON
ON
ON
0x320
OFF
OFF
ON
ON
OFF
ON
0x340
OFF
OFF
ON
OFF
ON
ON
0x360
OFF
OFF
ON
OFF
OFF
ON
0x380
OFF
OFF
OFF
ON
ON
ON
0x3a0
OFF
OFF
OFF
ON
OFF
ON
0x3c0
OFF
OFF
OFF
OFF
ON
ON
0x3e0
OFF
OFF
OFF
OFF
OFF
ON
表3.4PC机已占用地址表
ISA总线地址分配
功能
000~01F
DMA控制器1
020~03F
中断控制器1
040~05F
定时器
060~06F
键盘
070~07F
实时时钟NMI
080~09F
DMA页寄存器
0A0~0BF
中断控制器2
0C0~0DF
DMA控制器2
0F0~0FF
数学协处理器
1F0~1F8
硬盘驱动器
200~20F
游戏口
210~217
扩展单元
278~27F
并行口2
2B0~2DF
可选择EGA
2F8~2FF
异步通信口2
300~31F
原型卡
360~36F
PC网络卡
378~37F
并行口1
380~38F
SDLC通信口2
390~393
保留
3A0~3A9
SDLC通信口1
3B0~3BF
IBM单显
3C0~3CF
EGA
3D0~3DF
彩显/图显
3F0~3F7
软盘驱动器
3F8~3FF
异步通信口2
X2E1
GPIB适配器
X390~X393
异步通信口1
3.1.2主机中断矢量
运动控制器提供时间中断和事件中断信号,供主机使用。
JP2为GT-400-SG运动控制器中断矢量跳线器。
跳线器的跳针定义如表3.5所示。
GT-400-SG设置的默认中断矢量号为IRQ10。
表3.5主机中断矢量跳线定义
跳针
功能
跳针
功能
1
IRQ15
2
中断请求
3
IRQ14
4
中断请求
5
IRQ12
6
中断请求
7
IRQ11
8
中断请求
9
IRQ10
10
中断请求
3.1.3其它跳线定义
运动控制器提供看门狗实时监视其工作状态。
JP3为看门狗跳线选择器。
用户通过跳线设置使看门狗有效后,当控制器死机时,看门狗在延时一段时间后自动使控制器复位。
默认设置时,看门狗无效。
JP4为控制器调试跳线选择器,出厂时已设定,用户不得更改跳线。
3.2GT-400-SG运动控制器接口
GT-400-SG运动控制器需与接口端子板等附件配套使用,图3.2是它与这些附件的连接图。
先将GT-400-SG的CN2接口用随板配备的扁平电缆与转接挡板相连接。
将GT-400-SG插入计算机内的空ISA插槽内,并固定在计算机机箱上。
将转接挡板固定在机箱上的合适位置。
GT-400-SG的CN1接口通过随板配备的屏蔽电缆直接与接口端子板上的CN1接口相连接。
转接挡板的CN2接口通过随板配备的屏蔽电缆,连接到接口端子板上的CN2接口。
GT-400-SG的所有控制信号,都是经过接口端子板与控制对象连接的。
下面将分别对GT-400-SG及接口端子板上的连接器和接线端子加以介绍。
图3.2运动控制器与接口端子板连接示意图
3.2.1GT-400-SG控制接口CN1
CN1为GT-400-SG运动控制器的驱动控制接口。
该接口连接电机驱动器。
表3.6为GT-400-SG控制接口定义。
GT-400-SG的CN1与接口端子板的CN1定义相同,CN1接口主要用于电机的控制。
用户在使用运动控制器之前,须了解运动控制器的接口信号和电机驱动器的接口定义,妥善连线并避免带电插拔接口。
否则,信号连接错误或带电操作可能导致系统正反馈或硬件损坏使系统不能正常工作。
表3.6GT-400-SG控制接口CN1定义
引脚
信号
说明
引脚
信号
说明
引脚
信号
说明
1
22
43
2
23
44
3
24
PULSE0+
1轴脉冲输出
45
PULSE0-
1轴脉冲输出
4
DIR0+
1轴方向信号输出
25
DIR0-
1轴方向信号输出
46
5
26
47
6
27
48
7
PULSE1+
2轴脉冲输出
28
PULSE1-
2轴脉冲输出
49
DIR1+
2轴方向信号输出
8
DIR1-
2轴方向信号输出
29
50
9
30
51
10
31
52
PULSE2+
3轴脉冲输出
11
PULSE2-
3轴脉冲输出
32
DIR2+
3轴方向信号输出
53
DIR2-
3轴方向信号输出
12
33
54
13
34
55
14
35
PULSE3+
4轴脉冲输出
56
PULSE3-
4轴脉冲输出
15
DIR3+
4轴方向信号输出
36
DIR3-
4轴方向信号输出
57
A4+
辅助编码器1输入
16
A4-
辅助编码器1输入
37
B4+
辅助编码器1输入
58
B4-
辅助编码器1输入
17
C4+
辅助编码器1输入
38
C4-
辅助编码器1输入
59
A5+
辅助编码器2输入
18
A5-
辅助编码器2输入
39
B5+
辅助编码器2输入
60
B5-
辅助编码器2输入
19
AD_CLK
同步串行时钟
40
AD_TX
同步串行发送
61
AD_RX
同步串行接收
20
AD_RF
同步信号
41
N/A
保留
62
GND
数字地
21
GND
数字地
42
+5V
电源输出
3.2.2GT-400-SG控制接口CN2
CN2为GT-400-SG输入/输出接口。
该接口用于限位开关、Home信号输入、电机驱动器报警清除、驱动使能、报警信号输入和通用输入/输出以及RS-232。
表3.7是接口端子板和转接挡板的CN2接口定义(注意:
GT-400-SG上的CN2引脚定义不同)。
表3.7为GT-400-SGCN2定义
引脚
信号
说明
引脚
信号
说明
引脚
信号
说明
1
ENABLE0
1轴驱动允许
22
ENABLE1
2轴驱动允许
43
ENABLE2
3轴驱动允许
2
ENABLE3
4轴驱动允许
23
RESET0
1轴驱动报警清除
44
RESET1
2轴驱动报警清除
3
RESET2
3轴驱动报警清除
24
RESET3
4轴驱动报警清除
45
ALM0
1轴驱动报警
4
ALM1
2轴驱动报警
25
ALM2
3轴驱动报警
46
ALM3
4轴驱动报警
5
HOME0
1轴原点输入
26
HOME1
2轴原点输入
47
HOME2
3轴原点输入
6
HOME3
4轴原点输入
27
LIMIT0+
1轴正向限位
48
LIMIT0-
1轴负向限位
7
LIMIT1+
2轴正向限位
28
LIMIT1-
2轴负向限位
49
LIMIT2+
3轴正向限位
8
LIMIT2-
3轴负向限位
29
LIMIT3+
4轴正向限位
50
LIMIT3-
4轴负向限位
9
EXI0
通用数字量输入
30
EXI1
通用数字量输入
51
EXI2
通用数字量输入
10
EXI3
通用数字量输入
31
EXI4
通用数字量输入
52
EXI5
通用数字量输入
11
EXI6
通用数字量输入
32
EXI7
通用数字量输入
53
EXI8
通用数字量输入
12
EXI9
通用数字量输入
33
EXI10
通用数字量输入
54
EXI11
通用数字量输入
13
EXI12
通用数字量输入
34
EXI13
通用数字量输入
55
EXI14
通用数字量输入
14
EXI15
通用数字量输入
35
EXO0
通用数字量输出
56
EXO1
通用数字量输出
15
EXO2
通用数字量输出
36
EXO3
通用数字量输出
57
EXO4
通用数字量输出
16
EXO5
通用数字量输出
37
EXO6
通用数字量输出
58
EXO7
通用数字量输出
17
EXO8
通用数字量输出
38
EXO9
通用数字量输出
59
EXO10
通用数字量输出
18
EXO11
通用数字量输出
39
EXO12
通用数字量输出
60
EXO13
通用数字量输出
19
EXO14
通用数字量输出
40
EXO15
通用数字量输出
61
GND
数字地
20
RX
RS-232输入
41
GND
数字地
62
+5V
电源输出
21
TX
RS-232输出
42
+5V
电源输出
3.2.3接口端子板控制接口CN3
CN3接外部电源,以保证CN2各引脚正常工作。
板上标有+12V~+24V的端子接+12V~+24V,标有OGND的接外部电源地,至于使用的外部电源的具体的电压值,取决外部的传感器和执行机构的供电要求,使用时应根据实际要求选择电源。
3.2.4接口端子板控制接口CN4
CN4用于串行通讯的信号连接。
表3.8端子板CN4定义
引脚
信号
说明
引脚
信号
说明
1
6
2
RX
RS-232接收
7
3
TX
RS-232发送
8
4
9
5
GND
数字地
3.2.5端子板控制接口CN5,CN6,CN7,CN8
CN5、CN6、CN7、CN8使用时与电机驱动器相连,CN5对应1轴,CN6对应2轴,CN7对应3轴,CN8对应4轴。
以CN5为例,表3.9提供了各引脚的定义。
CN6、CN7、CN8的定义与CN5完全相同。
外部电源地指+12V~+24V地。
在脉冲控制信号输出的方式下,有两种工作模式。
一种是脉冲、方向信号模式,此时,引脚23、11输出差动的脉冲控制信号,引脚9、22输出差动的运动方向信号。
另一种工作模式是正反脉冲模式,此时,引脚9、22输出差动的正转脉冲控制信号,引脚23、11输出差动的反转脉冲控制信号。
如果驱动器需要的信号不是差动信号,将相应信号接于上述差动信号输出的正信号端(即引脚9、23)。
输出波形见表3.10。
表3.9端子板CN5定义
引脚
信号
说明
引脚
信号
说明
1
OGND
外部电源地
14
OVCC
+12V/+24V输出
2
ALM0
驱动报警
15
RESET0
驱动报警清除
3
ENABLE0
驱动允许
16
4
17
5
18
6
19
7
+5V
电源输出
20
GND
数字地
8
21
GND
数字地
9
DIR0+
步进方向输出
22
DIR0-
步进方向输出
10
GND
数字地
23
PULSE0+
步进脉冲输出
11
PULSE0-
步进脉冲输出
24
GND
数字地
12
25
13
GND
数字地
表3.10步进输出波形
有的步进电机驱动器没有驱动允许、驱动报警和驱动报警清除信号线时,则可以不接。
3.2.6接口端子板控制接口CN9,CN10
CN9、CN10对应于两个辅助编码器输入接口(可选),用户若需要该功能,在定购时特别申明。
其引脚定义见表3.11、表3.12。
表3.11端子板CN9定义
引脚
信号
说明
引脚
信号
说明
1
A4+
编码器输入
6
A4-
编码器输入
2
B4+
编码器输入
7
B4-
编码器输入
3
C4+
编码器输入
8
C4-
编码器输入
4
9
GND
数字地
5
+5V
电源输出
表3.12端子板CN10定义
引脚
信号
说明
引脚
信号
说明
1
A5+
编码器输入
6
A5-
编码器输入
2
B5+
编码器输入
7
B5-
编码器输入
3
8
4
9
GND
数字地
5
+5V
电源输出
3.2.7接口端子板控制接口CN11
GT-400-SG为用户提供了8路模拟输入通道(可选),用户若需要该功能,在定购时特别申明。
表3.13端子板CN11定义
引脚
信号
说明
引脚
信号
说明
1
AIN0
模拟输入
9
AGND
模拟地
2
AIN1
模拟输入
10
AGND
模拟地
3
AIN2
模拟输入
11
AGND
模拟地
4
AIN3
模拟输入
12
AGND
模拟地
5
AIN4
模拟输入
13
AGND
模拟地
6
AIN5
模拟输入
14
AGND
模拟地
7
AIN6
模拟输入
15
AGND
模拟地
8
AIN7
模拟输入
3.2.8端子板控制接口CN12,CN13,CN14
CN12、CN13、CN14用作专用及通用数字量输入/输出。
引脚定义见表3.14—表3.16。
引脚EXI0除作输入外,还可用作PC机的外部中断及一号辅助编码器信号锁存(可选)。
另外,通用输出的供电可以从CN12或CN13上引出。
表3.14端子板CN12引脚定义
引脚
信号
说明
1
HOME0
1轴原点输入
2
HOME1
2轴原点输入
3
HOME2
3轴原点输入
4
HOME3
4轴原点输入
5
LIMIT0+
1轴正向限位
6
LIMIT0-
1轴负向限位
7
LIMIT1+
2轴正向限位
8
LIMIT1-
2轴负向限位
9
LIMIT2+
3轴正向限位
10
LIMIT2-
3轴负向限位
11
LIMIT3+
4轴正向限位
12
LIMIT3-
4轴负向限位
13
EXI0
通用输入
14
EXI1
通用输入
15
OGND
外部电源地
16
OVCC
+12V/+24V输出
表3.15端子板CN13引脚定义
引脚
信号
说明
1
EXI2
通用输入
2
EXI3
通用输入
3
EXI4
通用输入
4
EXI5
通用输入
5
EXI6
通用输入
6
EXI7
通用输入
7
EXI8
通用输入
8
EXI9
通用输入
9
EXI10
通用输入
10
EXI11
通用输入
11
EXI12
通用输入
12
EXI13
通用输入
13
EXI14
通用输入
14
EXI15
通用输入
15
OGND
外部电源地
16
OVCC
+12V/+24V输出
表3.16端子板CN14引脚定义
引脚
信号
说明
1
EXO0
通用输出
2
EXO1
通用输出
3
EXO2
通用输出
4
EXO3
通用输出
5
EXO4
通用输出
6
EXO5
通用输出
7
EXO6
通用输出
8
EXO7
通用输出
9
EXO8
通用输出
10
EXO9
通用输出
11
EXO10
通用输出
12
EXO11
通用输出
13
EXO12
通用输出
14
EXO13
通用输出
15
EXO14
通用输出
16
EXO15
通用输出
3.3GT-400-SG运动控制器连接方法
3.3.1电机驱动器及专用输入连接方法
一般的步进电机驱动器与运动控制器连接,包括三个部分:
脉冲输出、专用输出、专用输入。
运动控制器的任何控制轴,都可以根据用户的要求设置成脉冲控制信号输出的形式,用来控制步进电机或脉冲方式控制的伺服电机。
脉冲输出、专用输出通过端子板CN5、CN6、CN7、CN8与电机驱动器连接,连接方法见图3.3—图3.4。
图3.3脉冲控制输出信号连接图
图3.4专用输出信号连接图
专用输入通过端子板CN5、CN6、CN7、CN8、CN12与电机驱动器及外部开关相连,连接方法见图3.5。
驱动器报警输入信号为常闭状态,(用户不用时,请将该输入对地短接)。
根据安全标准,系统的限位开关须接成常闭状态。
当工作台的运动超过其物理有效行程将使限位开关打开。
限位开关输入信号的有效电平可以通过主机命令进行选择。
原点开关为常开状态。
图3.5专用输入信号连接图
3.3.2通用数字量输入/输出连接方法
通用数字量输出由端子板CN14输出,连接方法见图3.6。
当输出接感性负载时,应考虑反电势的泄放。
通用数字量输入由端子板CN13、CN12输入,连接方法见图3.7。
图3.6通用输出信号连接图
图3.7通用输入信号连接图
3.3.3RS-232连接方法
运动控制器提供串行通讯方式与主机交换信息的方法,通讯通过接口端子板CN4实现。
连接方法见图3.9。
图3.9串行通讯连接图
3.3.4模拟输入连接方法
运动控制器提供可选的模拟输入信号,通过端子板CN11实现。
连接方法见图3.10。
图3.10模拟输入信号连接图
3.4GT-400-SG运动控制器安装注意事项
●检查GT-400-SG运动控制器外观是否有损坏;
●设定合理的基地址;
●关闭计算机电源,打开机盖;
●在计算机空闲的ISA总线插槽中插入GT-400-SG运动控制器;
●用螺钉锁紧GT-400-SG运动控制器及转接挡板;
●连接好两根62线的电缆及其他电气连线;
●合上计算机机盖,开机测试。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 运动 控制 卡固高卡 硬件
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《贝的故事》教案4.docx
《贝的故事》教案4.docx
-
《对韵歌》优秀教案8.docx
-
《函数yAsinωx+φ+P图象》wwwnet.docx
-
《静夜思》教学设计.docx
-
《汽车底盘构造与维修》题库与考核标准.docx
-
《世说新语》复习资料.docx
-
《我的服装我做主》教案设计.docx
-
《在品味情感中成长》教学片断设计.docx
-
11造价员《建设工程造价管理基础知识》精讲教程文件.docx
-
《不会叫的狗》教案 人教部编版1.docx
-
《操作系统》二学期A卷及答案.docx
-
《傅雷家书》名著阅读笔记.docx
-
《反不正当竞争法》下互联网平台封禁行为考辨以消费者用户合法权益保护为中心.docx
-
《化工原理》第六章蒸发.docx
-
《蓝海战略》概要11页.docx
-
《人生》读书心得.docx
-
《荷叶圆圆》公开课教案优秀教学设计26.docx
-
《科技出行研究报告》智能网联与新能源将变革未来汽车出行.docx
-
《272 向量的应用举例》导学案1.docx
-
《秋天》评课稿.docx
-
《电算化》第二章会计电算化的工作环境章节练习.docx
-
《室外给排水管道》施组.docx
-
《广东省建筑与装饰工程综合定额》计算规则.docx
-
《我多想去看看》教学.docx
-
《直通车车手基础认证》 考试答案 70题之欧阳育创编.docx
-
7天销量翻10倍皇冠卖家教您玩转最精准流量.docx
-
9 阿长和山海经.docx
-
《比例尺》教案.docx
-
《菜根谭》注译四闲适篇.docx
-
《福尔摩斯探案集》读后感15篇.docx
-
《红对勾》古代诗歌选择题答案补充.docx
-
《课堂密码》读后感及心得精选多篇.docx
-
安全播出事件事故管理实施细则 版.docx
-
城乡居民公共卫生服务管理平台操作说明.docx
-
关于中学生学习压力的研究性学习报告.docx
-
安徽省高等学校 质量工程项目结题报告.docx
-
高考地理一轮复习试题第36讲六个国家课后巩固训练教师版.docx
-
教学管理制度汇编.docx
-
案例泰国的金融危机.docx
-
光机电一体化控制技术.docx
-
安全目标管理.docx
-
北师大版小学数学四年级上册教学设计与反思.docx
-
节能减排知识题库100题.docx
-
广西继续教育公需科目考试题和答案满分.docx
-
哺乳期饮食指导.docx
-
安装工程水电施工方案.docx
-
国际会计准则第不动产厂房和设备.docx
-
精伦IDR210通用二次开发文档.docx
-
班级活动策划书范文范文精选.docx
-
财务报表分析客观题爱博.docx
-
行风建设工作计划小学行风建设工作计划.docx
