 电力拖动自动控制系统运动控制系统第四版复习题考试题目doc.docx
电力拖动自动控制系统运动控制系统第四版复习题考试题目doc.docx
- 文档编号:29646818
- 上传时间:2023-07-25
- 格式:DOCX
- 页数:15
- 大小:225.52KB
电力拖动自动控制系统运动控制系统第四版复习题考试题目doc.docx
《电力拖动自动控制系统运动控制系统第四版复习题考试题目doc.docx》由会员分享,可在线阅读,更多相关《电力拖动自动控制系统运动控制系统第四版复习题考试题目doc.docx(15页珍藏版)》请在冰豆网上搜索。
电力拖动自动控制系统运动控制系统第四版复习题考试题目doc
直流调速系统
选择题
1直流双闭环调速系统中出现电源电压波动和负载转矩波动吋,(A)。
AACR抑制电网电压波动,ASR抑制转矩波动
BACR抑制转矩波动,ASR抑制电压波动
CACR放大转矩波动,ASR抑制电压波动
DACR放大电网电压波动,ASR抑制转矩波动
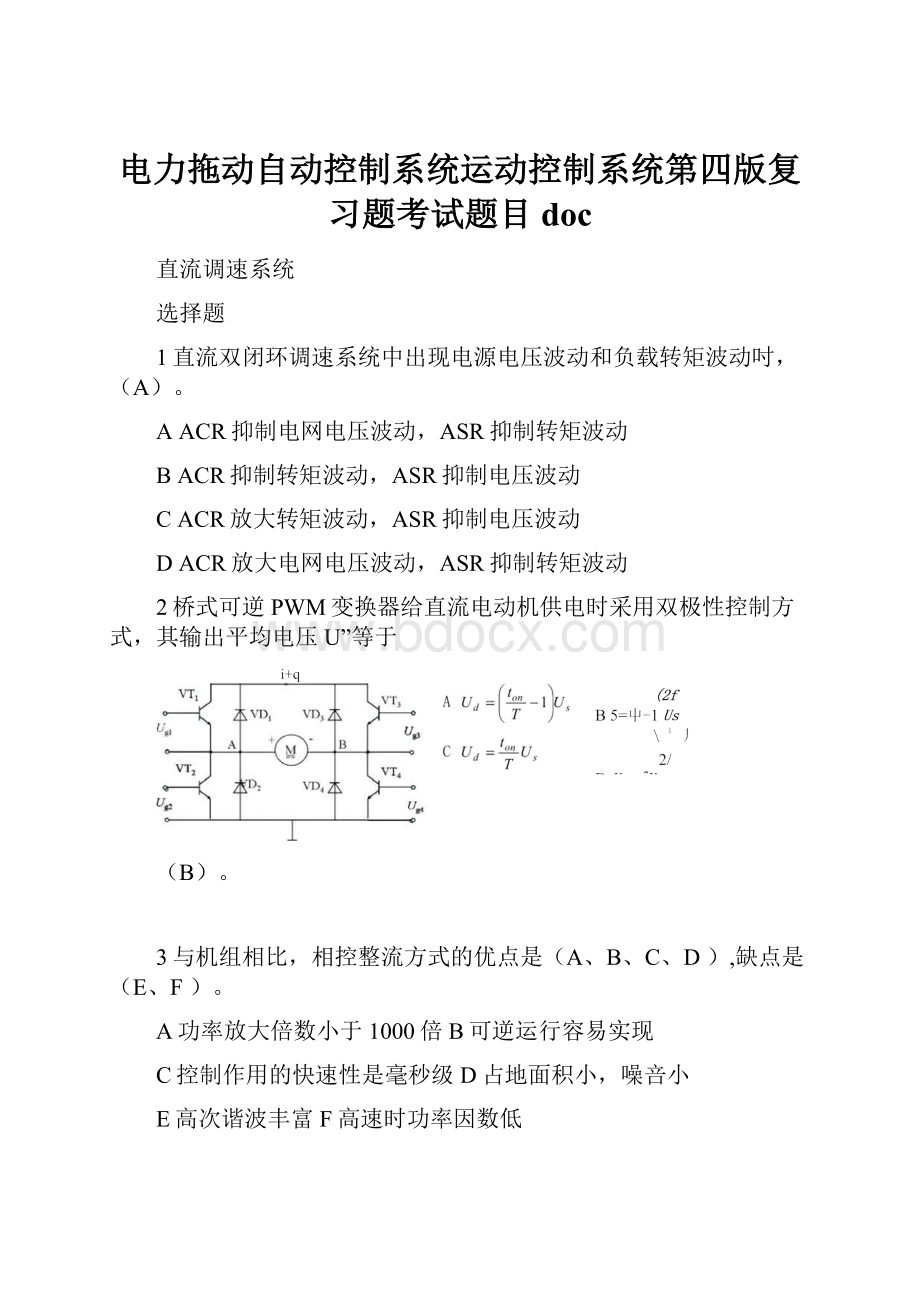
2桥式可逆PWM变换器给直流电动机供电时采用双极性控制方式,其输出平均电压U”等于
(B)。
3与机组相比,相控整流方式的优点是(A、B、C、D),缺点是(E、F)。
A功率放大倍数小于1000倍B可逆运行容易实现
C控制作用的快速性是毫秒级D占地面积小,噪咅小
E高次谐波丰富F高速时功率因数低
4系统的静态速降厶ned—定时,静差率S越小,则()。
A1B0(K为开环放大倍数)
C1+KD1/(1+K)
6速度单闭环系统中,不能抑制(D)的扰动。
A调节器放大倍数B电网电压波动
C负载D测速机励磁电流
7转速一电流双闭环不可逆系统正常稳定运转后,发现原定正向与机械要求的正方向相反,需改变电机运行方向。
此吋不应(C)。
A调换磁场接线B调换电枢接线
C同时调换磁埸和电枢接线D同时调换磁埸和测速发电机接线
8—个设计较好的双闭环调速系统在稳态工作时(C)0
A两个调节器都饱和B两个调节器都不饱和
CST饱和,LT不饱和DST不饱和,LT饱和
9a=[3配合控制有环流可逆调速系统的主回路中(D)
A既有直流坏流又有脉动环流B有直流坏流但无脉动坏流
C既无直流环流又无脉动环流D无直流环流但有脉动环流10普通逻辑无环流(既无推B乂无准备)可逆调速系统中换向时待工作组投入工作时,电
动机处于(B)状态。
A回馈制动B反接制动C能耗制动D自由停车
11双闭环直流调速系统电流环调试时,如果励磁电源合闸,电枢回路亦同时通电,给定由ACR输入端加入且产生恒定的额定电流,贝U()。
(假定电机不带机械负载)
A电机会稳定运转B电机不会运转C电机会加速到最高转速D过流跳闸12速度单闭环系统中,不能抑制()的扰动。
A调节器放大倍数B电网电压波动
C负载D测速机励磁电流
13a=P配合控制有坏流可逆调速系统的主回路采用反并联接线,除平波电抗器外,还需要()个环流电抗器。
A2B3C4D1
14转速PID调节器的双闭环系统与转速PI调节器的双闭环系统相比,(C)
A抗负载干扰能力弱B动态速降增大
C恢复时间延长D抗电网电压扰动能力增强
15输入为零时输出也为零的调节器是
AP调节器BI调节器CPI调节器DP1D调节器
16下列电动机哪个环节是比例惯性环节
AU/s)b5(s)cI/s)dE(s)
'n(s)I(s)Ud(s)-E(s)Id(s)-Ifz(s)
17直流电动反并联晶闸管整流电源供电的可逆调速系统给定为零时,主要停车过程是
A本桥逆变,回馈制动B它桥整流,反接制动
C它桥逆变,回馈制动D自由停车
18直流电动一组晶闸管整流电源供电的不可逆调速系统给定为零时,主要停车过程是
A本桥逆变,回馈制动B它桥整流,反接制动
C它桥逆变,回馈制动D自由停车
填空题
[如图,埸效应管VT5的作用是零速封锁即在给泄为零且反馈为零使调节器输出为零,以防止由于PI中由于积分作用输出不为零,使得移相控制角可能处于授小,出现全压启动导致过电流故障。
电位器RP1可调整输出正限幅值,RP2可调整输出负限幅。
C11是积分
电容,C5和R9接入速
度反馈构成微分调节器。
C6、C7是输入滤波电容。
2电流断续时KZ-D系统的机械特性变软,相当于电枢回路的电阻值壇
4脉宽调速系统中,开关频率越高,电流脉动越尘,转速波动越尘,动态开关损耗越大。
5采用转速一电流双闭环系统能使电动机按允许的最大加速度起动,缩短起动时间。
7典型I型系统的超调量比典型II型系统尘,抗扰动性能比典型II型系统羞。
8下图为单闭环转速控制系统。
u二二{J:
=ior,电枢回路最大电流为i(htl=30/,
(1)图中V是晶闸管整流器;
(2)图中J是平波电抗器,它的作用是抑制电流脉动和保证最小续流电流;
(3)图中采用的是PI即比例积分调节器,它的主要作用是保证动静态性能满足系统要求;
⑷此系统主电路由_^相交流电供电;⑸此系统具有转速(速度)负反馈环节;
(6)改变转速,应调节_RP1_电位器;
(7)整定额定转速1500转/分,对应8V,应调节_1<卩2_电位器;
(8)系统的输出量(或被控制量)是—转速
四分析与计算题
1如下图,转速、电流双闭坏调速系统中,八SR、ACR均采用PT调节器。
已知参数:
电动机:
Pn=3:
1KW,UN=220K,IN=20A,nN=lOOOr/min,电枢回路总电阻/?
=1.5Q,设
电力电子变换器的放大系数心=40。
(1)电流反馈系数“和转速反馈系数Q;(5分)
(2)突增负载后又进入稳定运行状态,则ACR的输出电压/•、变流装置输
出电压5,电动机转速〃,较之负载变化前是增加、减少,还是不变?
可调节什么参数?
(4)
若要改变系统起动电流应调节什
Un
么参数?
此时,设u;为正电压信号,在右图
ASR中应调节中哪个电位器?
当电动机在最高转速发生堵转时的Ud,U*,Ui9Uc值;(10分)
a=—==-^―=0.0W/rpm
解:
⑴:
山1000
J3=^~=—=O.33V/A
%30
小/小-=SJlR=空务愛JUd=KSUC?
U;=c.n=c
⑶因为口:
=Un=00^=^,所以调节a可以改变转速”0a
⑷因为U:
=5=阻,起动时转速调节器ASR饱和,输出限幅值U;严叽,所以改变ASR限幅值可以改变起动电流/伽,口;为正时,起动时ASR输出为负,所以应调节RP5來改变起动电流。
不能改变电流反馈系数,因为它述影响电流环的动特性。
⑸
U;=Uyi
U:
=107Q”=07,|t/:
冃41=107,
^/=Ur=30x1.5=45V,
U=^=Q^=Z^=30x^=H3K
cKKK,40
•>•>•>
2双闭环调速系统中如反馈断线会出现什么情况,正反馈会出什么情况?
答:
反馈断线后,匕=0,ASR饱和,输出为限幅值,转速环开环,相当于堵转,电流给定为ASR的输出最大值,电流闭环,按最大电流值恒流加速,转速上升,但由于转速反馈断线,触发移相控制电压增大到极限,触发角最小移至Q斷,转速达到最高值。
n=6-/凤=5cos%_,同样,正反馈时,也是一样。
QCe
五(10分)
下图所示为控制系统实验装置中的过流保护单元电路原理图,试简述其工作原理。
解:
当主电路电流超过某一数值后(2A左右),由9R3,9R2上収得的过流信号电压超过运算放大器的反向输入端,使D触发器的输出为高电平,使品体三极管V由截止变为导通,结果使继电器K的线圈得电,继电器K由释放变为吸引,它的常闭触点接在主回路接触器的线圈回路中,使接触器释放,断开主电路。
并使发光二极管亮,作为过流信号指示,告诉操作者已经过流跳闸。
SA为解除记忆的复位按钮,当过流动作后,如过流故障已经排除,则须按下以解除记忆,恢复正常工作。
六设计题
2已知控制对象开环传递函数G(s)二
(加+1加+1)'
T2>T},试加入串联调节器NG)将其
1校正为典世I型系统的儿种调节器选择
!
I
/
I心
Kz1
心
K2
对层i
(丁心1)(丁宀
1)1T$+1
s(c»1)](r15+i)(丁2$十))(5+1)
715-r1?
丁3S+I
)
|不多大,或八貉小!
调节器I
KP1("+
1)(r2s+1)
1
5
1
TS
„!
:
T严?
T£=l八「3
校正为典型II型系统的几种调节器选择
1心
K.
©
r•LQt
s(T^+i)(丁
1
卩十1)(^25十“
5(7\s+1)(□$+I)
s(丁门+1)(7事十1)1)(72s+i]
1
T“
Ti.丁2和近
丁、、丁2都较小
(Tj$I)
1
1
1!
I
1
i心心1
X(T】s+1)(丫2$十1);
■■■■MM•
kT】S+1
Api——
kT2i
3
"!
3
FW
ii
!
T产巧
:
6=班八4儿丿
1
丁或h八)
•i«J.1
参数記合
Ti=h(Tj4T2
IXJ・・
12十i
1
1
—1
"了2(或厂)
1
=・・—
|1
/1・、
1
校正为开坏典型I型系统,并求调节器结构和参数(15分)
必讥巧=(丁丄1、
5(715+1)
K.KpiK2Kpi1
•••KT=J卩T=卩T、=-
TT2
wg)叫f冷严叭时爲”)K叶+】)(&+「)=M
5(75+1)K2Pl©
':
T2>A.•.空+1=T2s+\,t=T2
%
••Kpi-2环22T{K2
所以,调节器的结构为PI调节器,
CS
UrRCS+11於+1"於+1
_丄—=•=_k•
UcaRCSRXaR\TSPTS
KP=—fT=RC
PaR\
375t
GD2nN
gd2r
eg
4计算电机空载时恒流升速到额定转速时间
375Te375导,炉2
交流调速系统
选择题
1带二极管整流器的SPWU变频器是以正眩波为逆变器输11!
波形,是一系列的(A)矩
形波。
A幅值不变,宽度可变B幅值可变,宽度不变
C幅值不变,宽度不变D幅值可变,宽度可变
2绕线式异步电动机双馈调速,如原处于低同步电动运行,在转子侧加入与转子反电动势相位相同的反电动势,而负载为恒转矩负载,则(B)
AOvSvl,输出功率低于输入功率BSvO,输出功率高于输入功率
COvSvl,输出功率高于输入功率DSvO,输出功率低于输入功率
3普通串级调速系统中,逆变角0T,则(C)。
A转速上升,功率因数下降B转速下降,功率因数上升
C转速上升,功率因数上升D转速下降,功率因数下降
4绕线式异步电动机双馈调速,如原处于低同步电动运行,在转子侧加入与转子反电动势相位相同的反电动势,而负载为恒转矩负载,则(C)
A,7
Cn>n},输出功率高于输入功率Dn>n},输出功率低于输入功率
5与矢量控制相比,直接转矩控制(D)
A调速范围宽B控制性能受转子参数彫响大C计算复杂D控制结构简单
6异步电动机VVVF调速系统的机械特性最好的是(C)
A恒4/0){控制B恒Eja)\控制
C恒Q./©控制D恒IJ(OX控制
7异步电动机WVF调速系统中低频电压补偿的目的是
A补偿定子电阻压降B补偿定子电阻和漏抗压降
C补偿转子电阻压降D补偿转子电阻和漏抗压降
8异步电动机WVF调速系统的机械特性最好的是(D)
A恒压频比控制B恒定子磁通控制C恒气隙磁通控制D恒转子磁通控制
9电流跟踪PWM控制时,当环宽选得较大时,
A开关频率高,B电流波形失真小C电流谐波分量高D电流跟踪精度高
填空题(10分)
下图为异步电动机矢量控制原理结构图,A,B,C,D分别为坐标变换模块,请指出它们分别表示什么变换?
(8分)这些变换的等效原则是什么(2分)?
解:
A矢量旋转逆变换yL,B二相静止坐标变成厂相静止坐标变换
C三相静止坐标系变成二相静止坐标变换
D矢量旋转变换VR,将二相静止坐标下的互相垂直的交流信号变换成二相旋转的互相垂直的直流信号。
等效变换的原则是旋转磁场等效或磁动势等效
下图为异步电动机矢量变换与电流解耦数学模型,A,B分别为坐标变换模块,请指出它们分別表示什么变换?
(8分)这些变换的等效原则是什么(2分)?
解:
A三相静止处标系变成二相静止处标变换B矢量旋转变换VR将二相静止坐标下的互相垂直的交流信号变换成二相旋转的互相垂直的直流信号。
其等效变换的原则是旋鯉场箋效或磁动势等效。
五简述题
下图为调速范围DW3的串级调速系统主回路单线原理框图,试说明起动时各电器开关正确的合闸顺序和停机时的分闸顺序,并说明理由。
(15分)
间接起动操作顺序
1•先合上装置电源总开关S,使逆变器在ySnin下等待工作。
2•然后依次接通接触器K1,接入起动电阻心再接通K0,把电机定子冋路与电网接通,电动机便以转子串电阻的方式起动。
3•待起动到所设计的/7min(5max)时接通K2,使电动机转子接到串级调速装置,然后断开K1,切断起动电阻,此后电动机就可以串级调速方式继续加速到所需的转速运行。
停车操作顺序
1•由于串级调速没有制动能力,应先将转速降至mnin,再合上K1,然后断开K2,使电
动机转子回路与串级调速装置脱离;
2.最后断开K0,以防止当K0断开时在转子侧感生断闸高电压而损坏整流器与逆变器。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 电力 拖动 自动控制系统 运动 控制系统 第四 复习题 考试 题目 doc
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《贝的故事》教案4.docx
《贝的故事》教案4.docx
-
《对韵歌》优秀教案8.docx
-
《函数yAsinωx+φ+P图象》wwwnet.docx
-
《静夜思》教学设计.docx
-
《汽车底盘构造与维修》题库与考核标准.docx
-
《世说新语》复习资料.docx
-
《我的服装我做主》教案设计.docx
-
《在品味情感中成长》教学片断设计.docx
-
11造价员《建设工程造价管理基础知识》精讲教程文件.docx
-
《不会叫的狗》教案 人教部编版1.docx
-
《操作系统》二学期A卷及答案.docx
-
《傅雷家书》名著阅读笔记.docx
-
《反不正当竞争法》下互联网平台封禁行为考辨以消费者用户合法权益保护为中心.docx
-
《化工原理》第六章蒸发.docx
-
《蓝海战略》概要11页.docx
-
《人生》读书心得.docx
-
《荷叶圆圆》公开课教案优秀教学设计26.docx
-
《科技出行研究报告》智能网联与新能源将变革未来汽车出行.docx
-
《272 向量的应用举例》导学案1.docx
-
《秋天》评课稿.docx
-
《电算化》第二章会计电算化的工作环境章节练习.docx
-
《室外给排水管道》施组.docx
-
《广东省建筑与装饰工程综合定额》计算规则.docx
-
《我多想去看看》教学.docx
-
《直通车车手基础认证》 考试答案 70题之欧阳育创编.docx
-
7天销量翻10倍皇冠卖家教您玩转最精准流量.docx
-
9 阿长和山海经.docx
-
《比例尺》教案.docx
-
《菜根谭》注译四闲适篇.docx
-
《福尔摩斯探案集》读后感15篇.docx
-
《红对勾》古代诗歌选择题答案补充.docx
-
《课堂密码》读后感及心得精选多篇.docx
-
宏观经济学第三章习题及答案.docx
-
红外能量法二点式自动对焦系统.docx
-
浅析保密意识和保密常识教育感悟体会Word下载.docx
-
标书模板医药Word下载.docx
-
软件工程复习资料选择题简化版Word下载.docx
-
天津大学研究生奖学金暂行管理规定Word文件下载.docx
-
什么是速读及速读的具体方法docWord文档格式.docx
-
事业单位联考综合应用能力C类真题及答案Word格式文档下载.docx
-
高中读《傲慢与偏见》有感800字精选5篇Word文档下载推荐.docx
-
第七册下初一下英语单词表Word下载.docx
-
陇南金石题壁文化研究Word文档格式.docx
-
村安全生产工作制度精.docx
-
水利工程施工课程设计报告书Word下载.docx
-
名师高清优质常规课例素材评选结果公示docWord文件下载.docx
-
高等教育学模拟考试试题及答案文档格式.docx
-
暖风芯体 QTF A165Word格式文档下载.docx
-
moldflow61安装教程文档格式.docx
-
鲁教版地理必修二23《城市空间结构》教案Word文件下载.docx
-
项目评估模拟考试试题附答案Word下载.docx
