 全自动洗衣机的基本构造及工作原理毕业论文.docx
全自动洗衣机的基本构造及工作原理毕业论文.docx
- 文档编号:29580065
- 上传时间:2023-07-24
- 格式:DOCX
- 页数:25
- 大小:476.63KB
全自动洗衣机的基本构造及工作原理毕业论文.docx
《全自动洗衣机的基本构造及工作原理毕业论文.docx》由会员分享,可在线阅读,更多相关《全自动洗衣机的基本构造及工作原理毕业论文.docx(25页珍藏版)》请在冰豆网上搜索。
全自动洗衣机的基本构造及工作原理毕业论文
全自动洗衣机的基本构造及工作原理毕业论文
第一章绪论
1.1全自动洗衣机的基本构造及工作原理
1.1.1全自动波轮洗衣机结构图
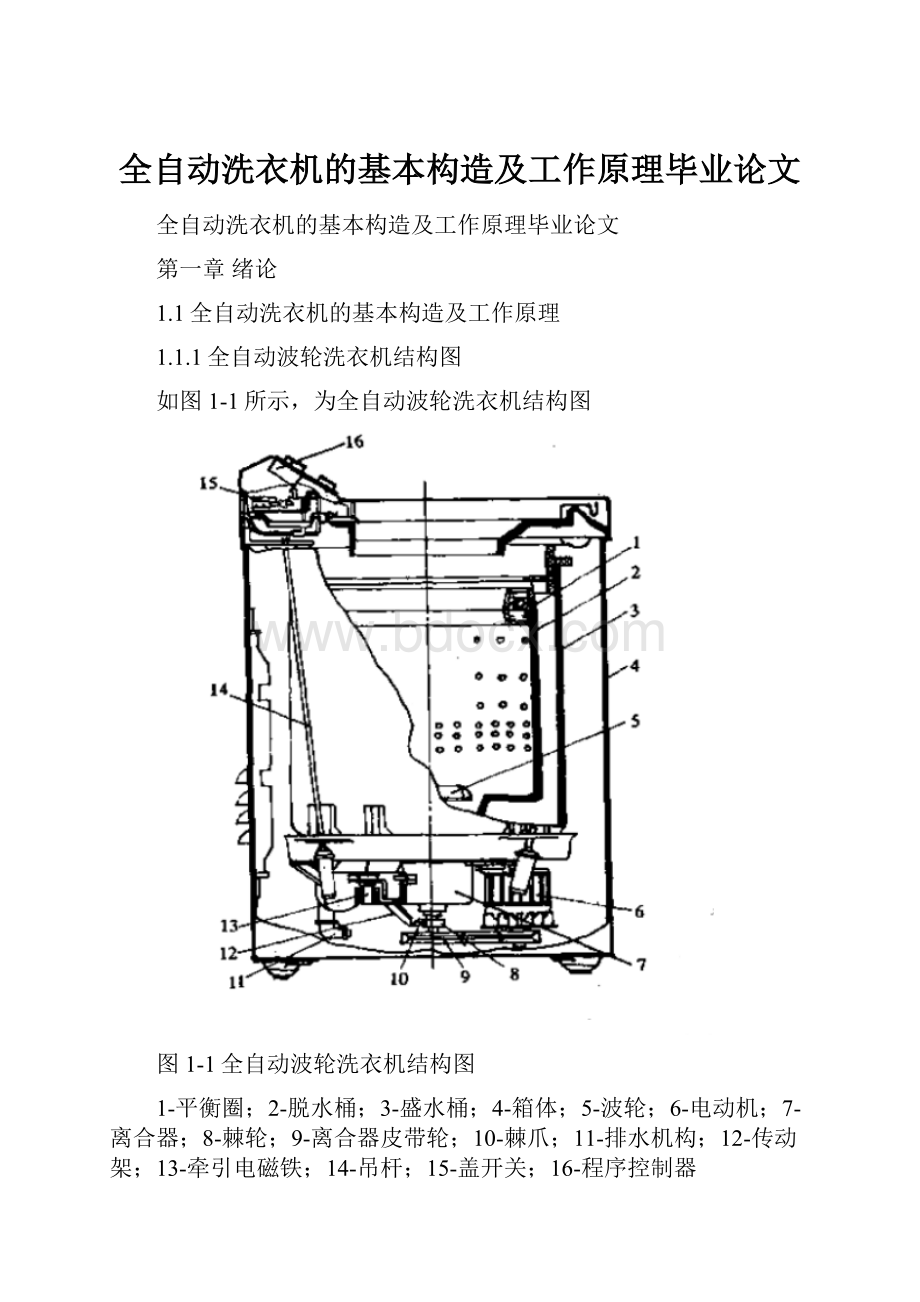
如图1-1所示,为全自动波轮洗衣机结构图
图1-1全自动波轮洗衣机结构图
1-平衡圈;2-脱水桶;3-盛水桶;4-箱体;5-波轮;6-电动机;7-离合器;8-棘轮;9-离合器皮带轮;10-棘爪;11-排水机构;12-传动架;13-牵引电磁铁;14-吊杆;15-盖开关;16-程序控制器
1.1.2全自动洗衣机工作原理
全自动洗衣机是通过电磁阀和继电器一起配合来控制进水、排水以及电机的通断,从而实现自动控制。
电磁进水阀起着通、断水源的作用。
当电磁进水阀的线圈断电时,移动铁芯在重力以及弹簧力的作用下,紧紧地顶着橡胶膜片,并将膜片的中心小孔堵塞,此时阀门关闭,切断水源。
当电磁进水阀线圈得电后,移动铁芯在磁力作用下上移,离开膜片,并使膜片的中心小孔打开,于是膜片上方的水通过中心小孔流入洗衣桶,实现进水。
由于中心小孔的流通能力大于膜片两侧小孔的流通能力,膜片上方压强迅速减小,膜片将在压力差的作用下上移,闭门开启,水流导通。
进水时采用重力感应传感器对水位进行实时监测。
洗衣机进水过程,重力感应传感器对盛水桶中的水位进行实时监测。
当水位到达预设水位时,自动停止进水,开始洗涤/漂洗。
全自动洗衣机的洗涤过程主要是在机械产生的排渗、冲刷等机械作用和洗涤剂的润湿、分散作用下,将污垢拉入水中来实现洗净的目的。
首先充满于波轮叶片间的洗涤液,在离心力作用下被高速地甩向桶壁,同时沿桶壁上升。
在波轮的中心处,因甩出液体从而形成低压区,使得洗涤液流回到波轮附近。
这样,在波轮附近形成了以波轮轴线为中心的涡流。
衣服在涡流的作用下,作螺旋式的回转运动,吸入中心后又被甩向桶壁,与桶壁发生摩擦。
又因为波轮的中心是低压区,衣物比较易被吸在波轮附近,不断地与波轮发生摩擦,就如同人工揉搓衣服,从而迫使污垢脱离衣服。
其次,当在放进洗涤液之后,由于惯性作用衣服的运动开始变得缓慢,在水流与衣服之间存在着速度差,使得两者发生相对运动,水流与衣服便开始相对摩擦,这种水流冲刷力同样有助于污垢脱离衣物。
再者由于洗衣涌不规则的形状,当旋转着的水流碰到桶壁后,其速度及方向都会发生改变,从而形成湍流。
在湍流的作用下,衣物做无规则地运动并且不断翻滚,其纤维不断地被弯曲、绞纽和拉长,衣物开始相互相摩擦,增大了洗涤的有效面积,提高衣物洗净的均匀性。
1.2全自动洗衣机的优缺点
全自动洗衣机是集洗涤、漂洗和甩干于一体,并且能自动完成洗衣全过程的洗衣机。
全自动洗衣机可提供多种洗涤方式供用户选择,用户可以自己根据自己需要洗涤的衣服的多少自由选择。
全自动洗衣机还能自动处理脱水不平衡(具有各种故障以及高低电压自动保护功能),工作结束或电源故障会自动断电,无需用户看管,确保用电安全。
目前,有的全自动洗衣机上还采用了模糊技术,即洗衣机能对传感器提供的信息进行逻辑推理,自动判断衣服的质地、重量和脏污的程度,从而可以自动选择最佳的洗涤、漂洗和甩干时间,进水量的多少和洗涤剂的使用量,使用方便,节能减排,真正地实现了洗涤衣物的自动化。
全自动洗衣机也有一些不可避免的缺点,比如耗水、衣物易缠绕、耗电量偏大、清洁性不佳、故障率偏高、洗涤剂使用量偏大和适用围有限等。
1.3我国全自动洗衣机的发展现状
2013年10月起,洗衣机能效新标准正式实施,我国洗衣机产品将发生结构性的变化。
与现行标准相比,新标准对洗衣机耗电量和用水量的限定值的要求提高了几个台阶,洗衣机的耗电量大幅下降。
尤其是滚筒洗衣机现行1级能效仅相当于新标准的5级。
洗衣机市场的准入门槛提高,考验洗衣机企业技术研发、产品结构调整、成本控制、市场布局等各方面的综合能力,洗衣机行业格局将发生改变。
前瞻产业研究院发布的《中国洗衣机行业产销需求与投资预测分析报告》显示,2013年1-9月,我国共生产洗衣机4208.95万台,同比增长2.66%;销洗衣机2752.35万台,同比增长7.78%;出口洗衣机1337.96万台,同比下降15.05%。
随着一线城市竞争日趋白热化和城镇化进程加快,三四级市场已经成为了洗衣机企业的竞争战场。
现阶段我国三四级市场消费者对价格的承受能力上限逐渐与城市市场趋同,消费需求逐渐由价格焦点转向品牌质量焦点。
这种背景下,能效新标准的实施使这种形势更为严峻,谁能在技术研发、产品结构调整、成本控制、市场布局等各方面的综合能力获得竞争优势,谁将在三四级市场获得市场占有率.
逐渐从价格战中脱离出来的三四级市场将迎来新的竞争模式,在三四级市场的竞争格局将有可能使得整个洗衣机行业格局发生改变。
三四级市场会是未来洗衣机企业重点竞争的区域,但一二级市场更新换代带来的存量市场也不可忽视,一二级市场与三四线市场共同产生新的行业格局。
1.4设计思路及选题意义
此次设计中的洗衣机设有不同水位,用户可以根据自己的需求选择不同水位。
设置水位后,洗衣机会根据用户设置的水位自动控制进水量的多少,最佳的洗涤、漂洗和甩干的时间,从而真正做到了节能减排。
此次设计的洗衣机定位为中低档洗衣机,主要用于学校、小型宾馆等场所。
主要用于洗涤中低档、不易手洗的大件衣物。
随着计算机技术的飞速发展,单片机作为嵌入式微控制器,因其具有体积小、价格低、可靠性高和使用灵活方便的特点,在工业测控系统、智能仪器和家用电器中得到了广泛的应用,将此次课题选为基于C51单片机的全自动洗衣机设计,主要是为了更加贴近我们的实际生活,为了将在书本上学到的知识应用到实际设计成产中。
并在设计过程中对已学习到的知识进一步巩固,使自己对单片机的应用有更深入的认识。
第二章全自动洗衣机元器件选择
2.151系列单片机选择
全自动洗衣机的控制系统主要由51系列单片机组成。
单片机控制模块采用87C51作为主控制芯片。
87C51作为普通的单片机广泛应用于各种产品中,其接口方便简单,应用广泛并且功能强大。
89C51是一种带4K字节闪烁可编程可擦除只读存储器(FPEROM—FlashProgrammableandErasableReadOnlyMemory)的低电压、高性能CMOS8位微处理器,俗称单片机。
单片机的可擦除只读存储器可以反复擦除100次。
该器件采用ATMEL高密度非易失存储器制造技术制造,与工业标准的MCS-51指令集和输出管脚相兼容。
由于将多功能8位CPU和闪烁存储器组合在单个芯片中,ATMEL的89C51是一种高效微控制器,89C2051是它的一种精简版本。
89C51单片机为很多嵌入式控制系统提供了一种灵活性高且价廉的方案。
单片机的主要特征是将CPU、RAM、ROM、定时器/计时器和多功能可编程I/O接口等计算机所需要的基本功能部件集成在一块大规模集成电路中。
2.1.151系列单片机部总体结构
从结构上来说,单片机的主要特征是将CPU、RAM、ROM、定时器/计数器和多功能可编程I/O接口等计算机所需的基本功能部件集成在一块大规模集成电路中。
这些部件通过高速片总线连接在一起,在软件和控制逻辑的作用下构成了一个有机的整体。
51系列单片机的部基本结构及基本特性如下:
1)一个CPU,一个片振荡器及时钟电路。
2)4KB程序存储器,128B数据存储器。
3)21个特殊功能寄存器。
4)32条可编程的I/O线(4个8位并行I/O口)。
5)可寻址64KB外部数据存储器和64KB外部程序存储器的控制电路。
6)两个16位定时器/计数器。
7)5个中断源,两个优先级嵌套中断系统。
8)一个可编程全双工串行接口。
9)一个具有位寻址功能、适于逻辑运算的位处理机。
2.1.251系列单片机引脚的定义与功能
图2-1所示为51系列单片机按总线功能分类排列的引脚图,下面将详细介绍各引脚定义及功能。
1)主电源引脚
Vcc(40脚):
单片机供电电源引脚,一般接+5V电源正端。
Vss(20脚):
单片机供电电源引脚,一般接+5V电源地端。
2)外接晶体振荡器引脚
XTAL1(19脚):
外接晶体振荡器的一端。
它是片振荡电路中反相放大器的输入端。
当不使用片时钟电路而外接时钟信号时,对于HMOS单片机,该引脚接地;对于CHMOS单片机,该引脚作为外接时钟信号的输入端。
XTAL2(18脚):
外接晶体振荡器的另一端。
它是片振荡电路中反相放大器的输出端。
当不使用片时钟电路而外接时钟信号时,对于HMOS单片机,该引脚作为外接时钟信号的输入端;对于CHMOS单片机,该引脚悬空不接。
图2-151系列单片机按总线功能分类排列的引脚图
3)控制线
RST/VPD(9脚)复位/备用电源线。
RST的含义为复位(RESET),VPD的含义为备用电源,该引脚为单片机的上电复位或掉电保护输入端。
复位分为上电复位和系统运行中复位。
在上电时,考虑到振荡器有一定的起振时间,因此该引脚上的高电平必须持续10ms以上才能保证有效复位,最简单的复位电路形式是在此引脚和Vss引脚之间连接一个约8.2千欧的下拉电阻,与Vcc引脚之间连接一个约10uF的电容,以保证可靠复位。
单片机系统正常运行时该引脚上出现持续两个机器周期的高电平,可是单片机恢复到初始状态,实现单片机的复位操作
在Vcc掉电期间,此引脚可接上备用电源,以保持部RAM数据不会丢失。
当Vcc的电压值下降到低于规定的水平时,接到VPD引脚的备用电源就向部RAM供电。
ALE/PROG(30脚)地址锁存允许/编程线。
51系列单片机为减少外部引脚的数量,采用了地址/数据总线复用技术。
ALE信号为振荡器频率的1/6,在访问片外存储器的时候,ALE输出的脉冲下降沿用于锁存P0口输出的低8位地址线,与P2口结合形成16位地址总线;在不访问外部存储器时,该引脚仍以不变的频率周期性的输出脉冲信号,可以用作对外输出的时钟或定时的目的。
PSEN(29脚)片外程序存储器读选通信号输出端,低电平有效。
从外部程序存储器读取指令或常数期间,该信号在每个机器周期两次有效,通过数据总线P0口读回指令或常数。
在访问片外数据存储器的时候,该信号将不出现。
EA/Vpp(31脚)片外程序存储器选用端,低电平有效。
该引脚为高电平时,访问部程序存储器,当PC(程序计数器)值超过片程序存储器空间时,则自动转向外部程序存储器的程序。
该引脚为低电平时,只访问外部程序存储器,不管是否有部程序存储器。
4)输入/输出口
P0口(39~32脚)输入/输出线P0.0~P0.7统称为P0口。
在不进行片外存储器扩展或I/O扩展时,可作为准双向输入/输出口使用,由于部无上拉电阻,一般需要外接上拉电阻;在进行片外存储器扩展或I/O扩展时,P0口作为分时复用的低8位地址总线和双向数据总线。
P1口(1~8脚)输入/输出线P1.0~P1.7统称为P1口。
P1口可作为准双向I/O口使用。
P2口(21~28脚)输入/输出线P2.0~P2.7统称为P2口。
在进行片外存储器扩展或I/O扩展时,P0口作为高8位地址总线;在不进行片外存储器扩展或I/O扩展时,可作为准双向输入/输出口使用。
P3口(10~17脚)输入/输出线P3.0~P3.7统称为P3口。
P3口除作为准双向I/O口使用外,每条端口线还可以用于第二功能。
P3口的每一条端口线均可定义为第一功能或第二功能。
P3口的第二功能如表2-1所示。
表2-1P3口的第二功能表
引脚
第二功能
说明
P3.0
RXD
串行口输入端
P3.1
TXD
串行口输出端
P3.2
INT0
外部中断0请求输入
P3.3
INT1
外部中断1请求输入
P3.4
T0
定时器/计数器0计数脉冲输入
P3.5
T1
定时器/计数器1计数脉冲输出
P3.6
WR
外部数据存储器写选通信号输出
P3.7
RD
外部数据存储器读选通信号输出
2.1.3存储器的配置
微型计算机的存储器地址空间有两种结构形式:
普林斯顿结构和哈佛结构。
普林斯顿结构是将数据存储器和程序存储器空间合二为一,一个地址对应唯一的一个存储单元,CPU访问ROM和RAM使用相同的指令;哈佛结构是将ROM和RAM分别安排在两个不同的地址空间,ROM和RAM可以有相同的地址,CPU访问ROM和RAM使用不相同的指令。
单片机面向的控制对象一般需要有较大的程序存储器用来固化调试好的程序,需要较小的数据存储器来存储程序执行过程中的数据,所以51系列单片机采用的结构是哈佛结构。
51系列单片机存储器从物理地址空间上可分为片、片外程序存储器和片、片外数据存储器4部分。
由于片、片外程序存储器统一编址,因此,从用户使用角度,其寻址(逻辑地址)空间可划分为:
片外统一的64KB程序存储器、128B部数据存储器和64KB外部数据存储器3个独立的地址空间。
在访问这3个不同的逻辑空间时采用的是不同形式的指令。
MCS-51单片机存储器的空间分配如表2-2所示。
表2-2MCS-51单片机存储器的空间分配
存储类型(Cx51定义)
地址围
说明
DATA
D:
00H~D:
7FH
片RAM直接寻址区
BDATA
D:
20H~D:
2FH
片RAM位寻址区
IDATA
I:
00H~I:
FFH
片RAM间接寻址区
XDATA
X:
0000H~X:
FFFFH
64KB片RAM数据区
CODE
C:
0000H~C:
FFFFH
64KB片外ROM代码区
2.2直流电机选择
直流电动机是指能将直流电能转换成机械能的旋转电机。
它是能实现直流电能和机械能互相转换的电机。
直流电动机的结构由定子和转子两大部分组成。
直流电动机运行时静止不动的部分称为定子,定子的主要作用是产生磁场,由机座、主磁极、换向极、端盖、轴承和电刷装置等组成。
运行时转动的部分称为转子,其主要作用是产生电磁转矩和感应电动势,是直流电动机进行能量转换的枢纽,所以通常又称为电枢,由转轴、电枢铁心、电枢绕组、换向器和风扇等组成。
1)设计中使用的电动机基本参数
本设计中使用的电动机基本参数如表2-3所示
表2-3设计中使用的电动机基本参数
品牌
绿格
产品类型
无刷直流电动机
型号
LGBL57
极数
4极
额定功率
500W
额定电压
24V
额定转速
5000(rpm)
2.3A/D转换器的选择
ADC0808是8路8位、逐次逼近式、单片CMOSA/D转换器件,它在产品设计是融汇了若干种模/数转换技术的长处。
8路8位A/D转换器ADC0808常用于生产过程中微电脑自动化控制和机床微电脑自动化控制中。
ADC08088路8位A/D转换器的部包括8位的模/数转换器、8通道多路转换器和微处理器兼容的控制逻辑电路。
其部设计有8通道多路转换器,它能起到电路的装换连接作用。
8通道多路转换器能够直接连通8个单端模拟信号中的任何一个。
ADC08088路8位A/D转换器芯片具有带有锁存功能的8路模拟多路开关(即8通道多路转换器),该开关可以对8路0~5V的输入模拟电压分时进行转换。
片具有多路开关的地址译码和锁存电路,以及比较器、256R电阻T型网络、树状电子开关、逐次逼近寄存器SAR、控制电路和时序电路等。
ADC08088路8位A/D转换器的输出具有TTL三态锁存缓冲器,可以直接连接到单片机数据总线上。
ADC08088路8位A/D转换器的综合功能是:
1)分辨率为8位;
2)最大不可调误差小于±1/2LSB;
3)单一+5V供电,模拟输入围0~5V;
4)具有锁存控制的8路模拟开关;
5)可以锁存三态输出,输出与TTL电平兼容;
6)功耗为15mW;
7)不必进行零点和满刻度调整;
8)转换速度取决于芯片的时钟频率。
时钟频率的围是10~1280kHz。
当CLK=500kHz是,转换速度位128微秒。
ADC08088路8位A/D转换器的芯片引脚排列图,如图2-2
图2-2ADC08088路8位A/D转换器的芯片引脚排列图
IN0~IN7:
8路输入通道的模拟量输入端口。
OUT1~OUT8:
8位数字量输出端口。
START,ALE:
START位启动控制输入端口,ALE位地址锁存控制信号端口。
这两个信号端口可以连接在一起,当通过软件输入一个正脉冲的时候,便立即启动ADC08088路8位A/D转换器进行A/D转换。
EOC,OE:
EOC为转换结束信号脉冲输出端口,OE位输出允许控制端口,这两个信号端口可以连接在一起,用来表示A/D转换的结束。
当OE端的电平发生由低变高跳变时,该跳变就会打开三态输入锁存器,将转换结果的数字量输出到数据总线上。
VREF(+),VREF(-):
VREF(+)和VREF(-)为参考电压输入端。
一般情况下,VREF(+)与Vcc连接在一起,VREF(-)与GND连接在一起。
CLK:
时钟输入端。
ADDA,ADDB,ADDC:
这是8路模拟开关的三位地址选通输入端。
在ADC08088路8位A/D转换器中,ADDA,ADDB,ADDC8路模拟开关的三位地址选通输入端与输入通道的对应关系,如表2-4所示
表2-4三位地址选通输入端与输入通道的对应关系
地址码
对应的输入通道
ADDC
ADDB
ADDA
0
0
0
IN0
0
0
1
IN1
0
1
0
IN2
0
1
1
IN3
1
0
0
IN4
1
0
1
IN5
1
1
0
IN6
1
1
1
IN7
ADC08088路8位A/D转换器与C51单片机的硬件接口有三种方式,即查询方式、中断方式和等待方式。
这三种硬件接口方式中,最常用的是查询方式和中断方式。
实际应用中,究竟采用哪种方式,应当根据具体情况和总体要求进行选择。
2.4重力感应传感器的选择
重力传感器是根据压电效应的原理来工作的。
此次设计中使用的重力感应传感器用于在洗衣机进水过程中对滚筒水位的实时监测,并将检测到的电压信号传输给A/D转换器进行A/D转换。
在PROTEUS模拟中,由于没有重力感应传感器模型,于是用如图2-5所示的滑动变阻器代替重力感应传感器模型,模拟实际中重力感应传感器实时监测到的洗衣机滚筒的水位。
实际设计中选用的传感器基本参数如表2-5所示
表2-5传感器基本参数
产品名称
TBH-1半导体式称重传感器
额定载荷
3~150kg
综合精度
0.3(线性+滞后+重复性)
灵敏度
40mV
蠕变
±0.3%F·S/30min
零点输出
±4%F·S
零点温度影响
±0.3%F·S/10℃
输出温度影响
±0.3%F·S/10℃
工作温度
-20℃~+65℃
输入阻抗
350±30Ω或120±30Ω
输出阻抗
350±30Ω或120±30Ω
绝缘电阻
>3000MΩ
安全过载
150%F·S
供桥电压
建议6V(DC)
材质
合金钢
接线方式
电源(+)红线电源(-)黑线
输出(+)绿线输出(-)白线
2.5进/出水电磁阀的选择
电磁阀(Electromagneticvalve)是用电磁控制的工业设备,是用来控制流体的自动化基础元件,属于执行器,并不限于液压、气动。
用在工业控制系统中调整介质的方向、流量、速度和其他的参数。
电磁阀可以配合不同的电路来实现预期的控制,而控制的精度和灵活性都能够保证。
电磁阀有很多种,不同的电磁阀在控制系统的不同位置发挥作用,最常用的是单向阀、安全阀、方向控制阀、速度调节阀等。
图2-3电磁阀实物图
1)工作原理
电磁阀里有密闭的腔,在不同位置开有通孔,每个孔连接不同的油管,腔中间是活塞,两面是两块电磁铁,哪面的磁铁线圈通电阀体就会被吸引到哪边,通过控制阀体的移动来开启或关闭不同的排油孔,而进油孔是常开的,液压油就会进入不同的排油管,然后通过油的压力来推动油缸的活塞,活塞又带动活塞杆,活塞杆带动机械装置。
这样通过控制电磁铁的电流通断就控制了机械运动。
图2-4所示为电磁阀部结构示意图。
图2-4电磁阀部结构示意图
2)主要分类
(1)电磁阀从原理上分为三大类:
●直动式电磁阀:
●分步直动式电磁阀:
●先导式电磁阀:
(2)电磁阀从阀结构和材料上的不同与原理上的区别,分为六个分支小类:
直动膜片结构、分步直动膜片结构、先导膜片结构、直动活塞结构、分步直动活塞结构、先导活塞结构。
(3)电磁阀按照功能分类:
水用电磁阀、蒸汽电磁阀、制冷电磁阀、低温电磁阀、燃气电磁阀、消防电磁阀、氨用电磁阀、气体电磁阀、液体电磁阀、微型电磁阀、脉冲电磁阀、液压电磁阀常开电磁阀、油用电磁阀、直流电磁阀、高压电磁阀、防爆电磁阀等。
3)此次设计中使用的电磁阀基本参数如表2-6所示
表2-6电磁阀基本参数
型号
2W-25SL
阀体材质
增强尼龙PA
线圈保护系数
塑封线圈IP65
密封方式
膜片式密封
膜片材质
丁晴橡胶(NPR)
适用介质
水、液体、气体
介质温度
0~50℃
动作方式
分步直动式
螺纹G
1″
通径
25mm
Cv值
12
长
87mm
高
125mm
工作电压
DC24V
2.6元器件汇总表
元器件
型号
数量
51单片机
AT89C51
1
A/D转换器
ADC0808
1
重力感应传感器
TBH-1半导体式称重传感器
1
锁存器
74LS373
1
直流电动机
LGBL57
1
电磁阀
2W-25SL
2
继电器
PCJ-105D3MH
2
晶体管
2N2219
6
感光晶体管
3DU21
2
排阻
1
电阻
8
反相器
74LS04
12
二极管
1N4007
12
熔断器
1
LED
4
按键
4
蜂鸣器
1
2.7全自动洗衣机的基本参数
颜色分类:
灰色
产品类型:
波轮洗衣机
使用方式:
全自动
能效等级:
二级
箱体材质:
渗锌钢板
桶材质:
不锈钢
电机类型:
普通电机
排水方式:
下排水
开合方式:
顶开式
洗涤功率(值):
400W
洗涤公斤量(值):
7.0kg
脱水功率:
400W
净重:
32kg
尺寸:
550*564*910mm
第三章uVision4集成开发环境的使用
3.1uVision4简介
1997年,KeilSoftware公司推出了基于Windows的开发工具软件uVision2,该软件将编辑器、编译器、调试器及辅助工具集成在一起,为51系列单片机应用程序的开发和调试提供了完整的解决方案。
由于该软件性能优异、易学易用,所以国51系列单片机的开发都使用uVision2软件开发平台。
2003年,KeilSoftware公司在uVision2版本的基础上,更新了集成的工具软件,推出了功能更强的uVision3。
本章将对uVision4集成开发环境的使用进行介绍。
uVision4作为51系列单片机的开发平台,提供了一套应用软件开发工具的集合,开发人员可以利用这些工具来编译C语言源代码、汇编语言源程序、连接和重定位目标文件和库文件、创建HEX文件和调试目标程序。
uVision4的软件界面如图3-1所示。
图3-1uVision4的软件界面
3.2uVision4的软件组成
1)uVision4IDE
2)C51编译器和A51汇编器
3)LIB51库管理器
4)BL51连接器/定位器
5)OH51格式转换器
6)uVision4调试器
7)Monitor-51
8)ISD51


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 全自动 洗衣机 基本 构造 工作 原理 毕业论文
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《贝的故事》教案4.docx
《贝的故事》教案4.docx
-
《对韵歌》优秀教案8.docx
-
《函数yAsinωx+φ+P图象》wwwnet.docx
-
《静夜思》教学设计.docx
-
《汽车底盘构造与维修》题库与考核标准.docx
-
《世说新语》复习资料.docx
-
《我的服装我做主》教案设计.docx
-
《在品味情感中成长》教学片断设计.docx
-
11造价员《建设工程造价管理基础知识》精讲教程文件.docx
-
《不会叫的狗》教案 人教部编版1.docx
-
《操作系统》二学期A卷及答案.docx
-
《傅雷家书》名著阅读笔记.docx
-
《反不正当竞争法》下互联网平台封禁行为考辨以消费者用户合法权益保护为中心.docx
-
《化工原理》第六章蒸发.docx
-
《蓝海战略》概要11页.docx
-
《人生》读书心得.docx
-
《荷叶圆圆》公开课教案优秀教学设计26.docx
-
《科技出行研究报告》智能网联与新能源将变革未来汽车出行.docx
-
《272 向量的应用举例》导学案1.docx
-
《秋天》评课稿.docx
-
《电算化》第二章会计电算化的工作环境章节练习.docx
-
《室外给排水管道》施组.docx
-
《广东省建筑与装饰工程综合定额》计算规则.docx
-
《我多想去看看》教学.docx
-
《直通车车手基础认证》 考试答案 70题之欧阳育创编.docx
-
7天销量翻10倍皇冠卖家教您玩转最精准流量.docx
-
9 阿长和山海经.docx
-
《比例尺》教案.docx
-
《菜根谭》注译四闲适篇.docx
-
《福尔摩斯探案集》读后感15篇.docx
-
《红对勾》古代诗歌选择题答案补充.docx
-
《课堂密码》读后感及心得精选多篇.docx
-
关于小学信息技术课堂结尾的深入思考Word格式.docx
-
境内医疗器械注册质量管理体系Word文档格式.docx
-
施工临时用电用水专项方案Word文件下载.docx
-
天津市十二重点中学届高三下学期毕业班联考二英语word版有答案文档格式.docx
-
工程实体质量实测实量作业指引Word格式文档下载.docx
-
最新00040法学概论最新总复习资料精选Word下载.docx
-
完整版食物中的毒物Word文档格式.docx
-
二年级口算+竖式知识分享Word格式.docx
-
广东省建设工程施工合同Word格式文档下载.docx
-
思修试题及答案汇总Word格式文档下载.docx
-
河北省学年高一上学期第二次月考英语试题Word格式.docx
-
新牛津英语八年级下册第一单元检测题Word文档下载推荐.docx
-
XX县院前农村急救体系建设项目可行性研究报告Word格式.docx
-
唯美散文美文Word格式文档下载.docx
-
开车高手整理了一年Word文档格式.docx
-
诗经中的赋比兴Word文件下载.docx
-
玄门日诵早晚课经Word下载.docx
-
整理开封公交线路总汇Word文档格式.docx
-
我爱夏天幼儿园教案3000篇Word下载.docx
